转向控制装置 相关应用程序的交叉引用外文翻译资料
2022-01-02 10:01
英语原文共 26 页,剩余内容已隐藏,支付完成后下载完整资料
转向控制装置
相关应用程序的交叉引用
[0001]本申请基于于2011年8月2日提交的日本专利申请No.2018-159027,其公开内容通过引用结合于此。
摘要
本发明提供一种用于车辆控制系统的转向控制装置,该车辆控制系统包括线控转向系统和制动系统。转向控制装置被配置为计算制动力差,这是左、右轮胎之间制动力的差异。转向控制装置还被配置为执行高转向控制,该高转向控制向左和右T提供制动力差异当转向角对应值大于判断阈值时,使车轮产生较小的车辆转弯半径。
技术领域
[0002]本发明涉及一种转弯控制装置。
背景
[0003]有一种用于控制车辆转向的车辆控制装置。例如,车辆控制装置执行这样的控制,即,当驾驶员在ST的端部接触状态下执行用于更紧地转向的转向操作时滚轮。车辆控制装置调节左右轮胎车轮的驱动力和制动力的分配,使车辆以较小的转弯半径。在上文中,方向盘的端部接触状态是方向盘处于最大角度的状态。
[0004]下面将给出对上述背景技术的讨论,其不一定是现有技术。
[0005]在上述电动助力转向装置中,当转向盘变为末端接触状态时,转向盘的转向力矩会急剧增加。特别地,由于在方向盘难以移动的状态下响应于施加到方向盘的驾驶员的力来执行控制,所以即使没有方向盘的旋转,也可以改变车辆转向状态。这可能不利地向驾驶员提供不舒适的感觉。
汇总
[0006]本公开提供一种用于车辆控制系统的转向控制装置,所述车辆控制系统包括线控转向系统和制动器S系统。线控转向系统是这样一种系统,其中转向构件和转向轮彼此机械地分离。该线控转向系统包括:转向装置,其被配置为根据转向状态产生用于使转向轮转向的扭矩转向构件的;以及反作用力装置,其被构造为向转向构件施加反作用力。制动系统能够相互独立地控制左、右轮胎的制动力。
[0007]所述转向控制装置包括一个或多个微型计算机,所述微型计算机被配置为用作计算BR的制动偏差计算单元制动力差异,即左右轮胎车轮之间制动力的差异。所述一个或多个微型计算机还被配置成执行高转向控制,该高转向控制向左和右提供制动力的差异当转向角对应值大于判断阈值时,使车辆的转弯半径变小,其中,所述转向角对应值是转向角或可转换为转向角的值的绝对值。通过上述转向控制装置,可以使车辆的转弯半径小于仅由转弯装置实现的转弯半径。
图纸简要说明
[0008]本公开的目的、特征和优点从以下参照附图进行的详细描述中变得更加明显,其中
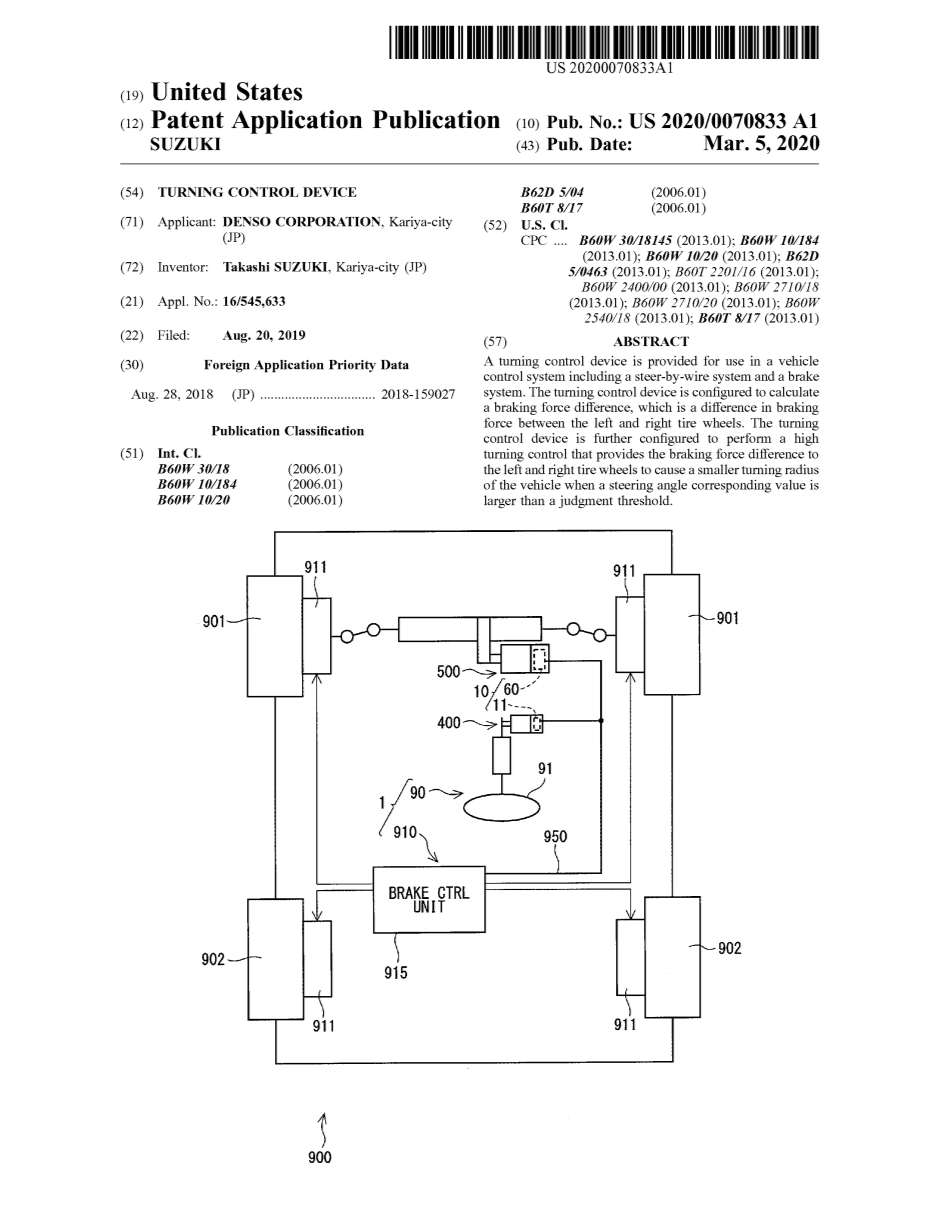
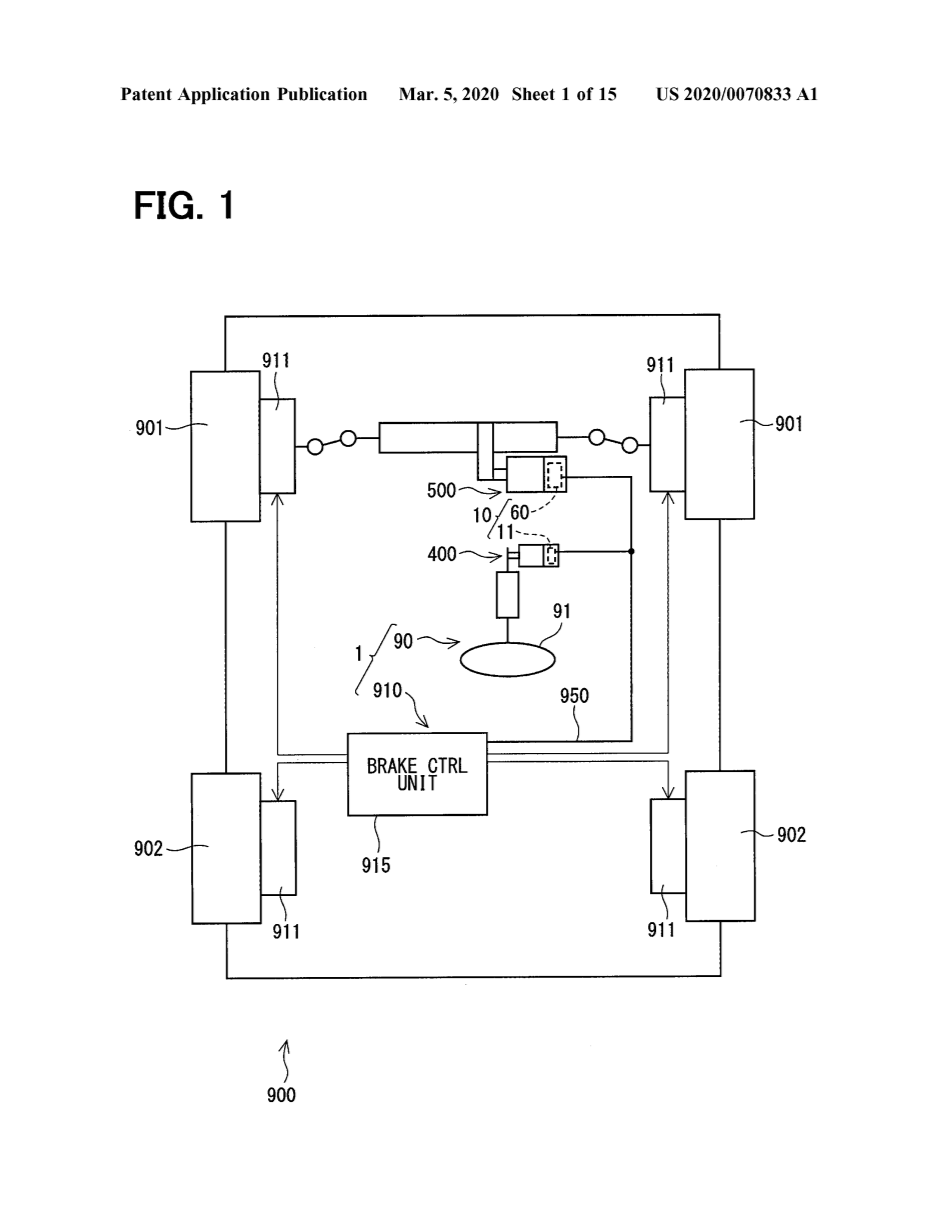
[0009]图1是示意性地示出根据第一实施例的车辆控制系统的图;
[0010]图2是示意性地示出根据第一实施例的线控转向系统的图;
[0011]图3是示出根据第一实施例的反作用力装置的剖视图;
[0012]图4是沿图3的线IV-IV截取的截面图;
[0013]图5是示出根据第一实施例的转向控制器的框图;
[0014]图6是说明根据第一实施例的反作用力控制器的框图;
[0015]图7是示出根据第一实施例的反作用力和制动力差异的图;[0016]图8是说明根据第一实施例的转向控制处理的流程图;
[0017]图9是说明根据第二实施例的反作用力控制器的方框图;
[0018]图10是示意性地示出根据第二实施例的反作用力命令计算图的图;
[0019]图11是示意性地示出根据第三实施例的线控转向系统的图;
[0020]图12是示出根据第三实施例的转向控制处理的流程图;
[0021]图13是示出根据第四实施例的线控转向系统的图;
[0022]图14是示意性地示出根据第四实施例的倾斜角的示图;
图15是示出根据第四实施例的倾斜伸缩控制单元的框图;和
[0024]图16是示出根据第四实施例的转向控制处理的流程图。
详细描述
[0025]将参考附图描述根据实施例的转向控制装置。在实施例中,使用相似的引用来引用相似的部件以避免冗余的描述。
第一实施例
[0026]将参照图1至图8说明第一实施例。图1示出了包括线控转向系统90和制动系统910的车辆控制系统1。
[0027]制动系统910包括制动致动器91和制动控制单元915。制动致动器911分别用于四个车轮。四轮为一对前轮和一对后轮902,前轮为转向轮901。制动控制单元915能够通过控制BR来分别改变转向轮901和后轮902的制动力AKE执行器911。制动系统910可以是任何制动系统,只要不同的制动力施加到相应的左轮和右轮。制动控制单元915从未示出的车轮速度传感器获得转向车轮901和后轮902的车轮速度,并且基于车轮速度计算车辆速度V。[0028]如图6所示,线控转向系统90包括方向盘91、转向轴92、扭矩传感器94、小齿轮96、齿条轴97拉杆98、关节臂99、反作用力装置400和转动装置500。反作用力装置400包括反作用力控制单元410和反作用力马达480。转向装置500包括转向控制单元510和转向电机580。
[0029]方向盘91设置在转向轴92的一端上。检测输入扭矩的扭矩传感器94设置在转向轴92上。转向轴92设置成与齿条轴97机械分离,尽管转向轴92和齿条轴97是完全分开在图中。可以在转向轴92和齿条轴97之间设置能够在断开和连接之间切换的离合器。[0030]反作用力电动机480连接到转向轴92。反作用力马达480通过施加取决于驾驶员转向操作的反作用力来向驾驶员提供适当的转向感与方向盘的比率
[0031]转向电机580控制转向轮901的转向角度。在该实施例中,转动马达580的旋转使小齿轮96旋转。小齿轮96的旋转运动通过齿条和小齿轮转换为齿条轴97的直线运动。拉杆98设置在齿条轴97的两端,并且当横拉杆98拉动或推动转向节臂99时改变转向轮901的方位。因此,一对转向轮901转动成具有取决于齿条轴97的位移的角度。
[0032]反作用力控制单元410一体地设置在反作用力装置400中的电机480沿其轴线方向的一侧,这就是所谓的机电一体化。转动控制单元510一体地设置在转动装置500中的电机580沿其轴线方向的一侧,这就是所谓的机电一体化。该机电一体化类型使得能够有效地将反作用力装置400和转动装置500布置在安装件中-空间有限的车辆。
[0033]反作用力装置400和转向装置500中的至少一个可以是机电SEPA额定类型,其中电动机和Co控制单元彼此独立地提供。在本实施例中,由于反力装置400和转向装置500的机械结构基本相同,将给出反作用力装置400的描述。当然,反作用力装置400和转动装置500可以具有不同的机械结构。
[0034]如图3和图4所示,反作用力电动机480是三相无刷电动机,并且包括定子840、转子860、容纳定子840和转子860的壳体830等。
[0035]反作用力电动机480包括作为一对绕组的第一电动机绕组180和第二电动机绕组280。两个电机绕组180、280的电气性能相同,并且以抵消绕组的方式缠绕在同一定子840上,以彼此相差30度的电角度。因此,控制被形成为使得在各个电机绕组180中流动的相电流,280具有彼此相差30度电角度的相位CP。优化电流相位差可增加输出转矩。优化电流相位差也能够减少第六转矩脉动。此外,具有相位差的激励导致电流被平均。这可以最大限度地消除噪声和振动的优点。热量的产生也是平均的,其可以减少依赖于温度的系统间误差,例如每个传感器的检测值和转矩以及电流能力的平均量被引导的程度。
[0036]在下文中,与第一电机绕组180的驱动控制相关的配置也被称为第一系统,与第二电机绕组280的驱动控制相关的配置也被称为第二系统。分配给第一系统Li的元素的参考数字是100加上一个两位数。分配给第二系统L2的元件的参考数字是200加上一个两位数。
[0037]定子840固定在壳体830上。电机绕组180、280绕定子840缠绕。转子860沿其径向设置在定子840的内侧,并且可相对于定子840旋转。
[0038]轴870插入转子860中,并与转子860整体旋转。轴870由轴承835、836支撑,使得轴870可相对于壳体830旋转。轴870的端部,该端部是比另一端更靠近反作用力控制单元410的端部之一,从壳体830向反作用力控制单元410突出。作为检测目标的磁体875设置在轴870的反作用力控制单元410侧的端部上。
[0039]壳体830包括具有底圆柱形形状的壳体834,壳体834包括后框架端837。以及设置在壳体834的开口侧上的前框架端838。壳体834和前框架端部838通过螺栓等彼此紧固。引线插入孔839形成在后框架端837上。在各引线插入孔839中插入与电动机绕组180、280的各相连接的引线185、285。引线185,285从引线插入孔839朝向反作用力控制单元410取出,并连接到电路板470。
[0040]反作用力控制单元410包括盖460、固定到盖460的散热器465、固定到散热器465的电路板470、安装在电路板470上的各种电子器件等。
[0041]盖460保护电子元件免受来自外部的冲击。盖460还防止灰尘和水进入反作用力控制单元410。盖主体461和连接器462一体地形成在盖460中。连接器462和盖主体461可以是分立的部分。连接器462的端子463通过未示出的布线等连接到电路板470。连接器的数量和端子的数量可根据信号的数量等适当地改变。连接器462设置在反作用力装置400的轴线方向的端部,并且具有在远离马达480的方向上打开的开口。[0042]电路板470例如是印刷电路板,并且被布置成面对后框架端837。对于两个系统中的每一个,电子部件独立地安装在电路板470上,以便两个系统提供完全冗余的系统。在一个实施例中,电子元件安装在一个电路板470上,但电子元件可以安装在分立电路板上。
[0043]电路板470具有两个主表面。马达480侧的一个主表面也称为马达表面471。与电机表面471相对的另一表面也称为盖表面472。如图11所示,构成驱动电路57的开关元件121、221,用于切换电动机绕组180、280的通电,旋转角传感器876、定制IC159、259等安装在电动机表面471上。旋转角传感器876安装在面对磁体875的部分处,以检测随着磁体875的旋转而发生的磁场变化。
[0044]电容器12和22以及电感器129、229、微型计算机170、270等安装在盖表面472上。电容器128、228平滑从未示出的电池输入的电力。电容器12和228还通过充电辅助向电动机480供电。电容器12和22以及电感器129、229形成滤波电路,并减少从另一装置传输的对电池进行剪切的噪声。并且减少从反作用力装置400传递到剪切电池的另一装置的噪声。未示出的功率继电器、马达继电器、电流传感器等也安装在马达表面471或盖表面472上。
[0045]如图1所示,反作用力控制单元410包括反作用力控制器11。转向控制单元510包括转向控制器60。反作用力控制器11、转向控制器60和制动控制单元915通过通信线路950连接。并且使用例如控制器区域网络(CAN)彼此可通信。.可以采用除CAN之外的通信系统,并且可以采用不使用有线通信线路950的无线通信。
[0046]反作用力控制器11、转向控制器60和制动控制单元91包括作为其主要部件的微型计算机。该微型计算机包括CPU、ROM、RAM、I/O和连接上述部件的总线。反作用力控制器11、转向控制器60并且制动控制单元915可以是由CPU执行的软件处理,该CPU执行预先存储在有形存储设备(例如,ROM(即非暂时性计算机可读有形介质)或者可以是由专用电子电路执行的硬件处理。在本实施例中,反作用力控制器11包括微型计算机170、270。因为第一和第二系统基本上执行相同的转向控制,并且基本上执行相同的反作用力控制,下面将描述第一个系统的控制。
[0047]如图6所示,转向控制器60包括减法器61、角度控制单元62、减法器63、电流控制单元64等。具体地说,微型计算机转向控制器60被配置为充当减法器61、角度控制单元62、减法器63、电流控制单元64诸如此类的。减法器61减去旋转电机旋转角度0t,该角度0t是旋转电机580的旋转角度。从反作用力马达旋转角度转换值0r_C计算角度偏差a0。反作用力马达旋转角度转换值0r_C是与所述对齐的反作用力马达旋转角度0r的转换值转动电机旋转角度0T。角度控制单元62计算转动力矩指令值TT*,使得角度偏差LB收敛到零,从而获得期望D转角。
【0048】减法器63从转动扭矩指令值TT*中减去从转动电机580反馈的转动扭矩TT,以计算Tu转矩偏差ATT。电流控制单元64例如通过以下方式来计算电压命令值,进行PI运算等,使回转转矩偏差ATT收敛为零,并且产生取决于电压指令值的驱动信号。通过基于所生成的驱动信号控制构成驱动电路65的开关元件的通断操作,从转向电动机580输出取决于转向扭矩指令值TT*的扭矩。
[0049]如图11所示,反作用力控制器11包括基本指令计算单元14、反作用力产生控制单元31高速转向控制执行判断单元41、制动偏差计算单元42高转动时间反作用力计算单元43、加法器51、52、减法器53、电流控制单元55等。具体地说,微型计算机反作用力控制器11被配置为作为基本命令计算单元14、反作用力产生控制单元31高速转向控制执行判断单元41、制动偏差计算单元42高转动时间反作用力计算单元43、加法器51、52、减法器53、电流控制单元55等
【0050】基本指令计算单元14基于转动扭矩TT计算基本反作用扭矩指令值Tr_B*。反作用力产生控制单元31基于反作用力马达转动来计算施加反作用力扭矩指令值Tr_C*反力马达角速度COR和反力马达电流IR,其中反作用力马达旋转角度0r是反
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[234828],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


