有手刹车和脚刹车杆车辆的制动系统外文翻译资料
2022-01-04 08:01
英语原文共 21 页,剩余内容已隐藏,支付完成后下载完整资料
有手刹车和脚刹车杆车辆的制动系统
交叉引用
[0001]本申请是对2017年12月14日提交的美国临时专利申请第62/598,797号和2018年7月27日提交的美国临时专利申请第62/711,138号的权利要求优先权,两者的全部内容均在本文中引用。
技术领域
[0002]本技术涉及一种具有手制动杆和脚制动杆的车辆制动系统。
背景
[0003]许多车辆现在都配备了电子制动控制单元,可以控制车轮的制动,至少部分地独立于车辆驾驶员的制动输入。车辆配备防抱死制动系统(ABS)就是一个例子。
[0004]许多车辆,例如汽车,都有一个单独的制动杆,通常是一个脚制动杆。因此,制动压力被施加作为司机驱动脚制动杆可以从一个压力传感器测到。电子制动控制单元可以利用单个压力传感器的压力传感器来辅助控制所有车轮的制动。
其他车辆,如摩托车和越野车(ATV),通常有一个手制动杆和一个脚制动杆。在某些情况下,驱动其中一个刹车杆会导致所有刹车的驱动,就像在汽车上使用脚刹车杆一样。在这种情况下,一个电子制动控制单元使用一个单一的压力传感器,就像在汽车上使用的。
[0006]在其他情况下,手杆驱动前制动器,脚杆驱动后制动器。这有时被称为分裂制动系统。在这种情况下,使用单一压力传感器的电子制动控制单元就不能使用,就像汽车上使用的压力传感器一样。使用这种电子制动控制单元在分离系统将提供制动辅助功能(ABS)的一个手制动杆和脚制动杆的驱动单压力传感器相关联,但当另一个手制动杆和脚制动杆的驱动。
[0007]由于汽车电子制动控制单元的单一压力传感器一般设置在单元内部,一种解决方案是使用两个电子制动控制单元,一个用于手制动杆,一个用于脚制动杆。然而,这样的解决方案非常昂贵和笨重,并需要用非常复杂的液压连接之间的刹车杠杆,刹车控制单元和刹车。
[0008]因此,人们希望有一种制动系统,包括一种电子制动控制单元,这种电子制动控制单元可用于具有手制动杆和脚制动杆的车辆,而手制动杆和脚制动杆是分体制动系统的一部分。
总结
[0009] 当前技术的目标是至少改善现有技术中存在的一些不便之处。
[0010]根据当前技术的一个方面,提供了车辆有一个框架,一个跨座安装在框架上,前右轮实时连接到框架,左侧车轮实时连接到框架,后轮实时连接到框架,指导装配实时连接到前面左、右车轮,一个电机安装在框架提供至少一个车轮,前对制动器施加给连接到前右轮制动前右轮,一个左闸实时连接到前面左前轮制动左前轮,后轮刹车实时连接到后轮制动后轮,和电子制动控制单元。该电子制动控制单元具有泵、与泵流畅连接的阀箱、第一压力传感器和电子控制器。阀室的第一入口,第一次出口流畅连接到前面右闸,第二个出口流畅连接到前面左闸,第一个阀有选择地流畅连接第一入口与泵出口,第二个阀有选择地流畅连接第一个进口和泵的第二个出口,第二口,第三个出口流畅连接到后刹车,所述第三阀有选择地将所述第二进口和所述泵与所述第三出口流体连接。第一压力传感器设置在阀箱内,用于感应第一进口与第一和第二阀之间的第一流体压力。电子电子控制器连接到泵,第一个阀,第二阀和第三阀门控制泵的运行,第一个阀,第二个阀门和第三阀门,电子连接到第一个压力传感器接收第一信号表明流体压力首先感觉到的压力传感器。车辆也有第一主缸流畅地连接到第一入口,一只手制动杆实时连接到第一个主缸驱动第一主缸,从而开动前左和右刹车阀室,第二个主缸流畅连接到第二个入口,操作地连接到第二主缸的脚制动杆,用于驱动第二主缸,从而通过阀箱驱动后制动器,以及设置在阀箱外部的第二压力传感器。第二压力传感器感应第二进口和第二主缸之间的流体压力。第二压力传感器以电子方式连接到电子控制器,用于发送指示由第二压力传感器所感知的第二流体压力的第二信号。电子制动控制单元通过打开第三个阀门和通过驱动泵,有选择地执行后制动器,以响应第一主缸的执行。电子制动控制单元根据第二主缸的驱动,通过打开第一和第二阀以及通过驱动泵,有选择地启动前右制动器和左制动器。
[0011]在本技术的一些实施例中,第二压力传感器安装在第二主缸上。
[0012]在本技术的一些实施例中,第二压力传感器垂直高于脚制动杆。
[0013]在本技术的一些实施例中,后轮为右后轮。车辆也有一个左后轮操作地连接到框架上。后制动器与左右后轮操作连接,用于制动左右后轮。
[0014]在本技术的一些实施例中,后轮为右后轮,后制动器为右后轮制动器。车辆还具有一个左后轮操作地连接到框架上,以及一个左后轮操作地连接到左后轮上用于制动左后轮。所述阀箱还具有第四个出口,所述第四个出口流体地连接到左后制动器上,所述第四个阀门选择性地流体地连接所述第二进口和所述泵与所述第四出口。电子控制器以电子方式连接到第四阀,以控制第四阀的操作。脚制动杆与第二主缸操作连接,用于驱动第二主缸,从而通过阀箱驱动后右、左制动器。电子制动控制单元根据第一主缸的驱动,通过打开第三和第四阀以及通过驱动泵,有选择地驱动后左和右制动器。
[0015]在一些体现目前的技术,电子制动控制单元选择性地促动后制动响应驱动的第一主缸通过打开第三个阀和驱动泵只有当第一感觉到压力的压力传感器压力高于第一阈值。电子制动控制单元有选择地执行前面左、右制动器响应驱动第二主缸通过打开第一和第二阀门和驱动泵只有当第二压力感觉上面第二个压力传感器是第二个压力阈值。第二个压力阈值大于第一个压力阈值。
[0016]在本技术的一些实施例中,第一压力阈值小于0.5 psi。
[0017]在本技术的一些实施例中,第一个压力阈值为0 psi。
[0018]在本技术的一些实施例中,第二个压力阈值为5psi。
[0019]在一些当前技术的体现,当电子制动控制单元促动后制动响应驱动的第一主缸通过打开第三个阀和驱动泵:第一主缸适用第一战线前左、右制动器制动压力,和泵适用于第一次后后刹车制动压力。当电子制动控制单元启动前左和右刹车反应驱动的第二主缸通过打开第一和第二阀门和驱动泵:泵适用于第二个前前左、右制动器制动压力,第二个主缸第二个后制动压力适用于后方刹车。第一前制动压力大于第一后制动压力。
[0020]在本技术的一些实施例中,第二后制动压力大于第二前制动压力。
[0021]在本技术的一些实施例中,其中,对于相等的第一前制动压力和第二后制动压力,第一前制动压力大于第二前制动压力。
[0022]在本技术的一些实施例中,当第一前制动压力和第二后制动压力相等时,第二后制动压力大于第一后制动压力。
[0023]在本技术的一些实施例中,前后制动比等于第一前制动压力除以第一后制动压力;后-前制动比等于后制动第二压力除以前制动第二压力;前-后制动比大于后-前制动比。
[0024]在一些体现目前的技术,第一次进口刹车线流畅连接第一主缸第一入口,第二个入口闸线流畅连接第二个主缸第二入口,第一次出口刹车线流畅正确连接前刹车第一出口,第二个出口刹车线流畅连接前左闸第二出口,和第三个出口刹车线流畅连接后制动和第三个出口。
[0025]在一些体现目前的技术,电子控制器控制操作的第一阀,第二阀和第三阀门开启和关闭的第一阀,第二阀和第三阀门周期性前制动,防止锁分别左前制动和后制动。
[0026]在本技术的一些实施例中,制动液储槽与第二主缸隔开并与之流动连接。
[0027]在本应用程序中,与空间方向相关的术语,如前向、后向、向上、向下、左、右,通常由坐在其上的正常驾驶位置的车辆驾驶员所理解。
[0028]本技术的实施例至少具有上述对象和/或方面中的一个,但不一定具有全部。应该理解的是,由于试图达到上述目标而导致的现有技术的某些方面可能不满足这个目标和/或可能满足这里没有特别提到的其他目标。
[0029]本应用程序中提供的术语解释和/或定义优先于本应用程序中引用的任何文件中可能包含的对这些术语的解释和/或定义。
[0030]本技术的其他和/或可选的特征、方面和优点将从以下描述、附图和附加的权利要求中变得明显。
图纸简要说明
[0031]为了更好地了解现有技术,以及技术的其他方面和进一步的特点,请参考以下描述,这些描述将与附图一起使用:
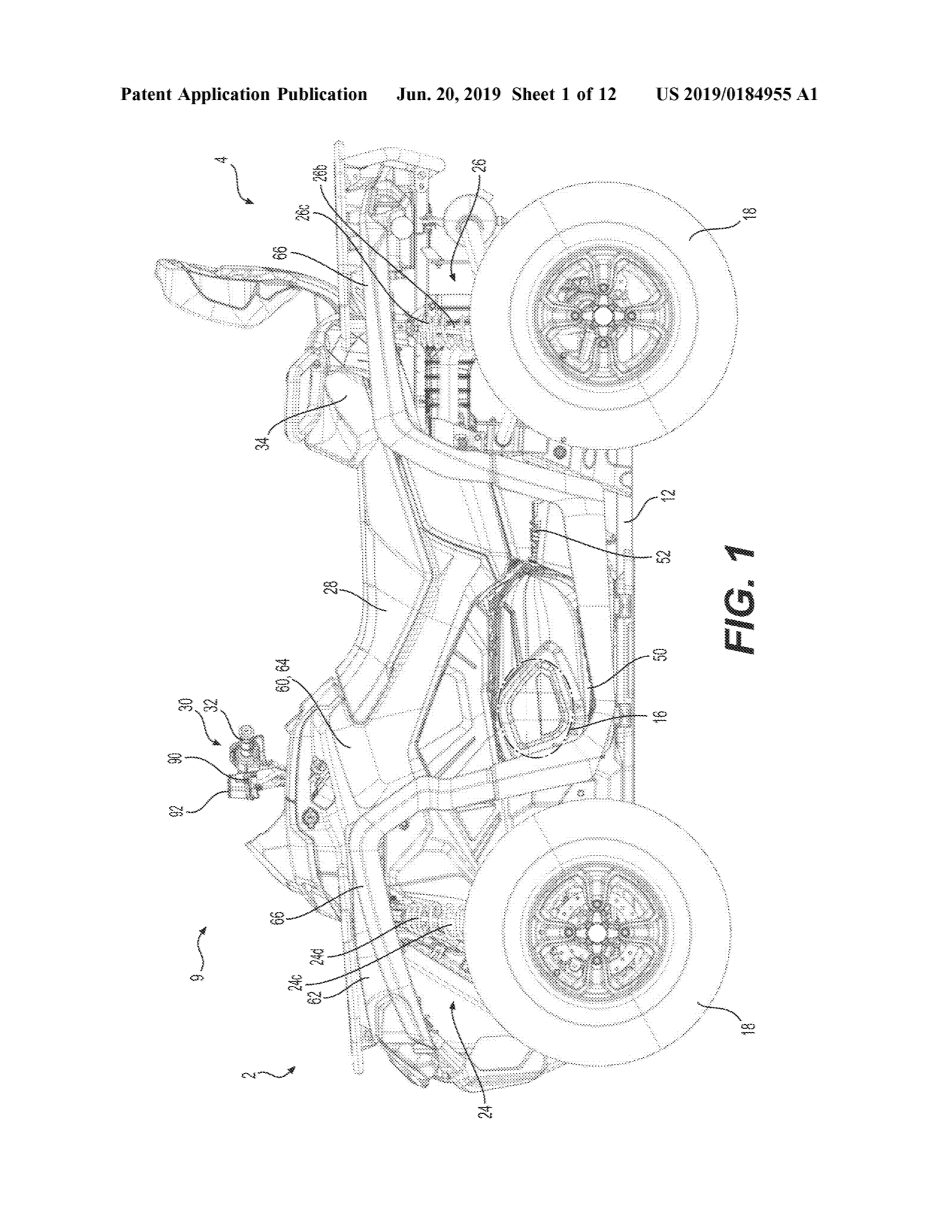
[0032]图1为全地形车辆左侧俯视图;
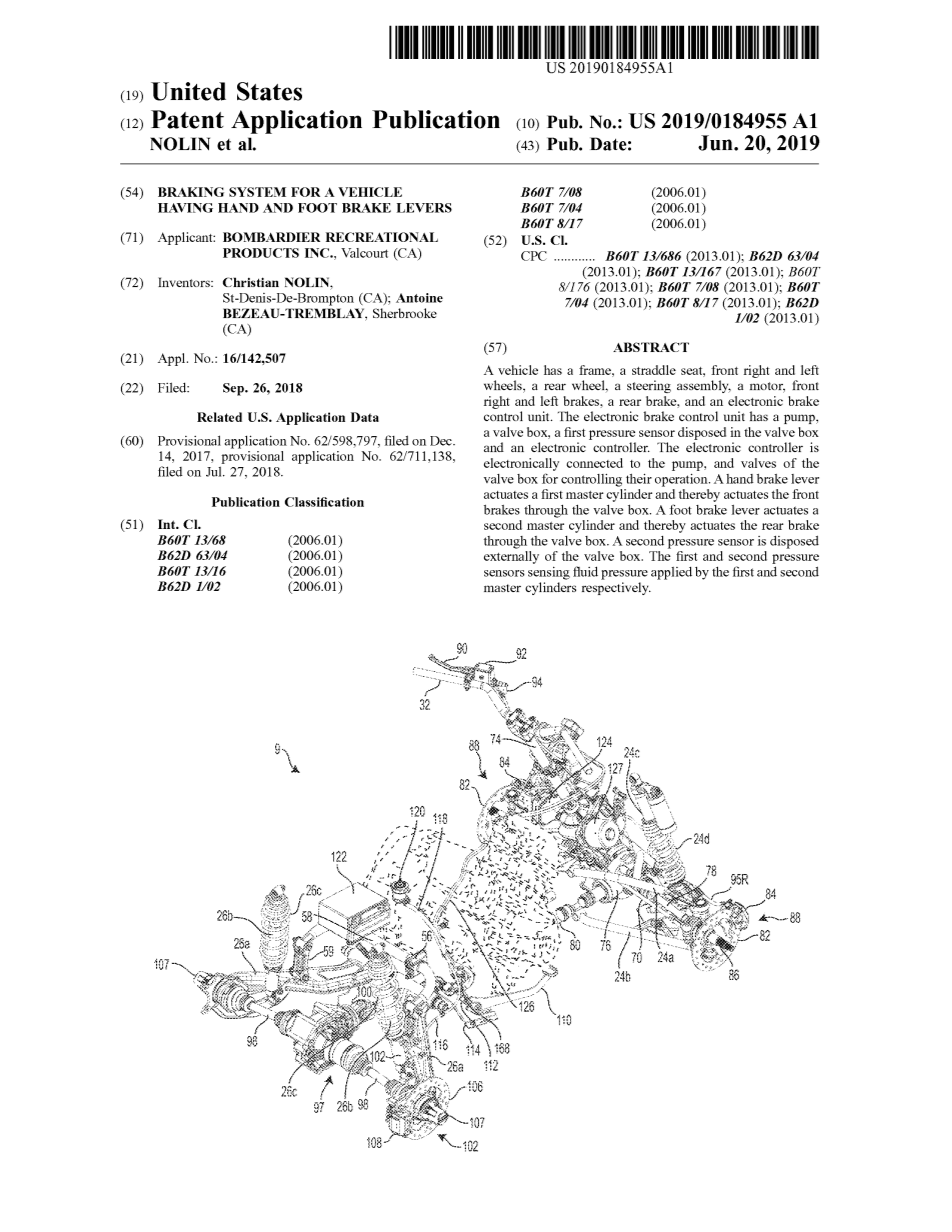
[0033]图2是从图1车辆的后、右侧、左右前悬架、左右后悬架、左右前制动器、后制动器和转向部件的透视图;
[0034]图3是图2组件的右侧俯视图;
[0035]图4为图2各部件的俯视图;
[0036]图5是图2各部件的底部平面图;
[0037]图6为图1车辆防抱死制动系统(ABS)总成的俯视图;
[0038]图7是从图6的ABS总成后方右侧拍摄的透视图;
[0039]图8是从图1所述车辆的ABS总成的备选实施例的右侧后方拍摄的透视图;
[0040]图9为压力传感器和ABS总成脚制动杆主缸的右侧视图,如图6所示;
[0041]图10为ABS总成电子制动控制单元的俯视图,如图6所示;
[0042]图11 ABS装配示意图,如图6所示;和
[0043]图12 .图8 ABS装配示意图。
详细描述
[0044]将参照一种四轮跨座全地形车辆(ATV) 9来描述目前的技术。但是,目前技术的一些方面可以用在其他类型的四轮和三轮跨座车辆上。[0045]参照图。1到7,ATV 9有一个前端2和一个后端4定义一致的前进方向的ATV 9。ATV 9有一个框架12,其中安装了一个内燃机16为ATV 9提供动力。预计ATV 9可能由其他类型的发动机提供动力,例如由电动发动机提供动力。
[0046] ATV 9有两个前轮18和两个后轮18。轮子通过传动装置与发动机相连(未显示)。四个轮子18的每一个都配备了低压气球轮胎适应越野条件和穿越崎岖的地形。
[0047]如图1所示,ATV 9还包括整流罩60,包括ATV 9前端2处的前筋膜62和延伸到ATV 9侧面的几个侧板64。每个轮子上都安装了一个挡泥板66,以保护驾驶员和/或乘客不受旋转轮子18投射出的灰尘、水和其他碎片的伤害。ATV 9进一步包括安装在框架12上的跨座28,用于容纳ATV 9的驾驶员。驾驶员脚踏板50设置在驾驶员座椅28的任何一个上,并且垂直布置在驾驶员座椅28以下,以支持驾驶员的脚。另一个跨座34被安排在驾驶员座位28的后面,以容纳一名乘客。乘客脚踏板52纵向位于左右司机脚踏板50的每个后方。乘客脚踏板52配置略高于驾驶员脚踏板50,设计用于容纳坐在乘客座位34上的乘客的脚,乘客座位34配置略高于驾驶员座位28。考虑到乘客座位34和乘客脚踏板52可以省略。
[0048]两个前轮18分别由各自的前悬挂组件24从框架12上悬挂下来,而两个后轮18分别由各自的后悬挂组件26从框架12上悬挂下来。
[0049]每个前悬总成24包括上a臂24a、下a臂24b、前减震器24c和前卷簧24d。前卷弹簧24d安装在前减震器24c上。前卷弹簧24d和前减震器24c的下端与上a臂24a枢转连接,上端与框架12枢转连接。上下a臂24a和24b各自的内端枢转连接到框架12上。在上下A臂24a和24b的外端安装有kingpin 85(图4)。每个前轮18是旋转连接到其相应的主销85。预计前悬架组件24可以是一个不同的类型。
[0050]每个后悬架总成26包括一个摆动臂26a、一个后减震器26b和一个后卷簧26c。每一个摆动臂26a有一端可枢转地连接到框架12上,约有一个位于后轮18前面的枢轴54,通常在框架12内横向延伸,另一端支撑其相应后轮18的轮轴86。每个摆动臂26a通过连杆59连接到一个扭力杆58上。扭力杆58通过支架56安装在框架12上。对于每个后悬架总成26,后减震器26b和后卷簧26c各有一端枢转连接到框架12,另一端枢转连接到相应的摆动臂26a。预计后悬架组件26可以是一个不同的类型。
[0051]转向装置30由车架12旋转支撑,使驾驶员能够操纵ATV 9。转向装置30包括连接到转向柱74上的把手32,用于驱动可操作地连接到前轮、左轮和右轮的转向机构70。动力转向电机127安装在转向柱74上。动力转向电机127通过转向连杆70操作连接到转向柱74和左右前轮18。
[0052] ATV 9可以在后轮驱动模式或四轮驱动模式下工作。它的前端2包括一个前差速器76适应接收,通过传动轴80从发动机16转矩。在其左右两侧,前面的差速器76连接到一个内等速(CV)接头(未显示),该接头连接到各自半轴78的一端。外CV接头(未显示)连接到两个半轴的外端78。轮轴86通过其相应的主销85支撑,连接其相应的外CV接头。每个轮轴上都安装有前轮18和前制动盘82。根据ATV 9的行驶条件,前差速器76可能会向两个前轮18发送不等的扭矩,使前左轮18和前右轮18可以以不同的速度旋转。
[0053]前左和右制动88分别包括制动盘82的对应部分,每部分还包括安装在主销85上的卡钳84。前左、右卡钳84分别与出口制动线95L、95R连接。每个卡钳84包括一对位于其各自的制动盘82的相对侧面的刹车片。前制动器88通过在出口制动线95L和95R施加流体压力来驱动卡钳84,从而使刹车片对各自的制动盘82施加压力。
[0054] ATV 9包括一个后阀芯齿轮(未显示)封闭在外壳97内。阀芯齿轮96的输入轴100通过万向节99可操作地连接到轴101上。传动轴101由万向节103连接到变速器,以接收来自发动机16的输入扭矩。在其左右两侧,阀芯齿轮96被连接到一个内CV接头(未显示)连接到各自的半轴98的内端。外CV接头(未显示)连接到每半轴的外端98。两轮轴104通过并由摆动臂26a的下端支撑,并连接到外CV接头
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[234814],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


