基于单端行波分析的径向配电网故障测距外文翻译资料
2022-07-14 17:06:42
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
基于单端行波分析的径向配电网故障测距
作者:Liang Rui , Fu Guoqing, Zhu Xueyuan, Xue Xue
摘 要
为在线路故障时迅速恢复电力供应,故障定位仍然是一个具有挑战性的问题。本文提出了一种新的单端行波故障测距方法。该方法首先用BP神经网络方法确定零模行波的传播速度。然后通过对零初始和天线模式波前的精确时间的确定来得出速度差,并以此故障距离进行了初步估计。通过这个初步的故障距离,从故障位置和终端发出的反射波的到达时间可以成功计算。最后,根据选择这一对时间戳的数学关系,故障距离可以被精确计算。该方案已通过PSCAD / EMTDC进行模拟,结果表明上述程序的正确性和有效性。
关键词:故障定位、行波速度、波前识别、小波变换
1. 前 言
单相接地故障是配电网故障事件中的主要代表。故障定位是指准确估计故障馈线和馈线上的故障位置。具体可见文章1-5。
行波故障测距一般分为两种方法,时域分析和频域分析法[6,7]。在行波捕获方法中,单端和双端故障定位程序为主要方法。双端故障测距程序是指由馈线两端采集的行波数据来进行。通过辨析从两端发出的波前时间差,故障的位置是很容易测量的。但该方法设备通信量大且需要两端GPS同步,这种方法成本高。由于时间精度至少限定在微秒级,GPS同步设备在某些应用中不能满足精度要求。通过与双端行波法测距的比较,研究了单端行波法测距的必要性,提出了一种更经济、更适用的单端行波测量装置(8—10)。然而,准确地识别反射波阵面是一项艰巨的挑战。当电网发生故障时,不同的行波模式有不同的传播速度。基于不同模态行波的速度不同,许多学者提出了识别反射波阵面的故障定位方法。通过确定不同的行波模式的时间戳,故障位置大概可以确定,但模式0不确定的波速是被忽略的,除了不同模式的一次波前,二次波前含有其他有价值的信息都被丢弃。通常,行波传播速度模式1和2是大致不变的,而传播模式0波速度是频率相关的[ 11–13 ],且传输速度越大沿断裂线故障距离减小[ 8,14,15 ]。
本文假定零模分量的波速为常数,大致初始故障位置已被推导出。由于不同模态行波传输速度的不同,对应于模式1和模式0的两个初始波前分别有一个到达时间的间隙。初步的断层位置是进一步准确定位的线索。在确定网络参数的同时,故障馈线初始反射波前与故障端远端母线到达时间之间的数学关系也确定了。通过两个单端故障测距方程,准确地识别出模式1的两个反射波阵面,进一步得到了故障位置。最后,算出平均值,故障定位更准确。其结果通过PSCAD/EMTDC仿真验证。
2. 信号处理方法的选择
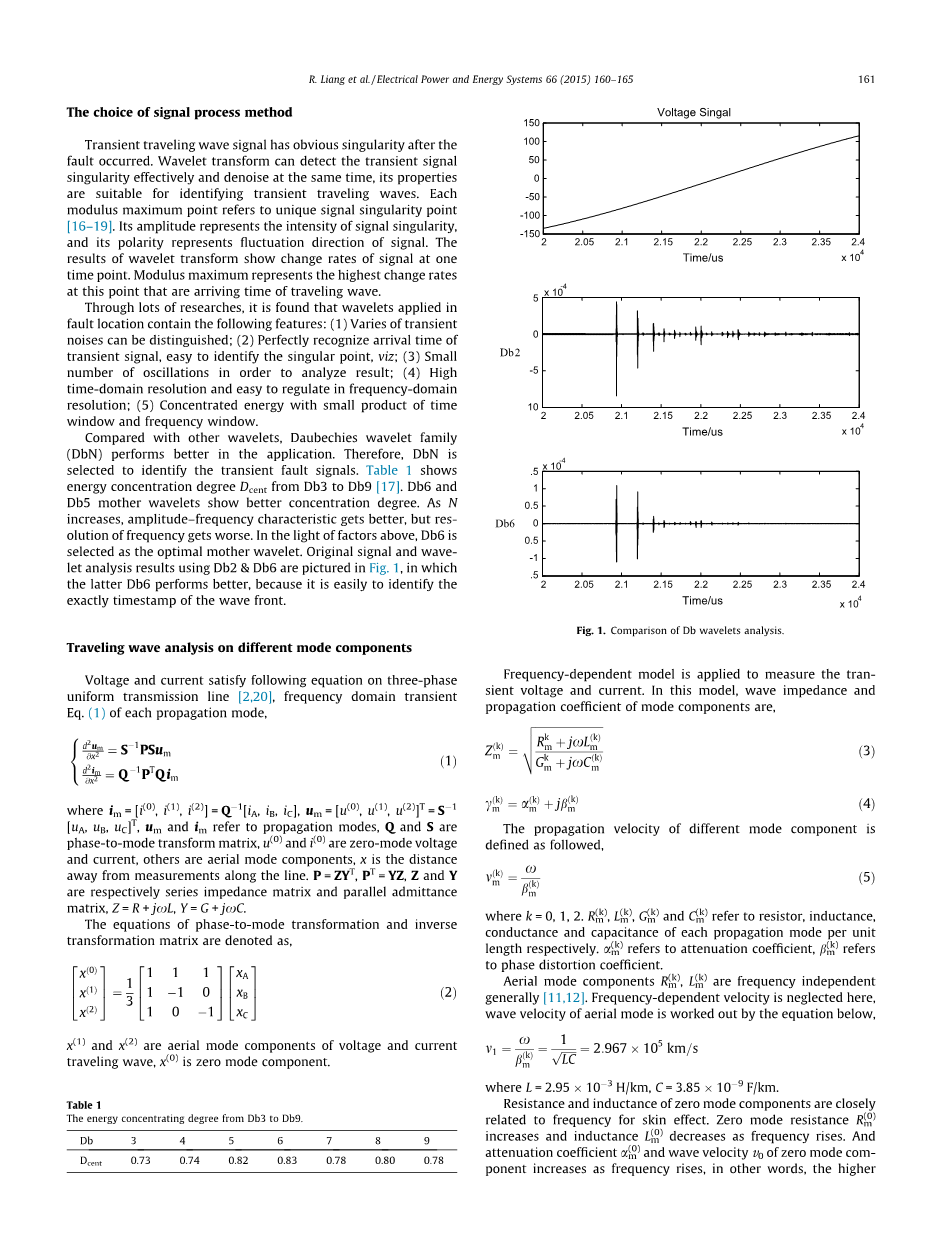
暂态行波信号在故障发生后具有明显的奇异性。小波变换能有效地检测瞬态信号奇异性,同时也能对信号进行去噪,其特性适用于瞬态行波信号的识别。每个最大模值就是唯一信号奇点[16-19]。它的振幅代表信号奇异的强度,其极性代表信号的起伏方向。小波变换的结果显示了信号在一个时间点上的变化率。模极大值表示行波到达时间的最高变化率。
通过大量的研究,发现小波应用于故障定位包含以下特征:(1)可以区分不同的瞬态噪声;(2)完全识别瞬态信号的到达时间,即:容易识别奇异点;(3)振荡次数少,利于分析结果;(4)很高的时间分辨力和易于在频域调节分辨率;(5)从时间窗口和频率窗口集中精力解决问题。
与其他小波相比,多贝西小波家族(DbN)在具体应用中具有更好的效果。因此,选择DbN来识别故障暂态信号。表一显示了能量集中度,从Db3到Db9[17]。Db6和Db5小波基有更好的集中度。随着N的增加,幅频特性变好,但频率分辨率变差。鉴于以上因素,Db6被选作最优小波基。图一中显示了原始波和用Db2amp;Db6的小波分析结果,其中Db6效果更好,因为它能更好的识别波前的精确时间戳。
3. 不同模态分量的行波分析
三相均匀传输线电压和电流满足该方程[2,20],等式(1)是每个传输模值的瞬态频域方程,
(1)
其中 ,和指传输模值,Q和S是相模传输矩阵,和分别是零模电压和电流,其他都是天线模式组件,x是沿着传输线的距离。,Z和Y分别是串联阻抗矩阵和并联导纳矩阵,
相模变换和逆变换的表达式可表示为:
(2)
和是行波电压和电流的天线模式组件,是零模组件
采用频率相关模型测量暂态电压和电流。在该模型中,模态分量的波阻抗和传播系数是
(3)
(4)下式定义了不同模态分量的传播速度
(5)
其中k=0,1,2。 分别指每个传播模式下单位长度电阻,电感,电容和电导。
指衰减系数, 指相位失真系数。
天线模式组件 , 是频率独立的[11,12],这里忽略了与频率有关的速度,用下面的方程算出天线模式的波速。
其中
零模分量的电阻和电感与趋肤效应的频率密切相关。当频率升高的时候,零模电阻 增大零模电感 减小。当频率升高时,衰减系数 和波速增大,也就是说,零模的高频分量传播速度较快,衰减较低。因此,零模分量的波前到达测量装置,其频率分量包括连续的高低频分量。随着测量距离的进一步增大,零模波前衰减更多,传播速度变慢。图2显示了零波速与航模和故障距离的关系。
上图所示的关系是获得零模行波速度的一种方法。但是,由于未知故障位置,此应用程序无效。考虑到零和天线模式之间的速度差被连接到故障位置,所以我们可以间接获得零模速度,如图3所示。
在PSCAD中对不同的故障电阻和起始角进行仿真,并利用小波变换对数据进行分析,识别波阵面到达时间。然后采用bp(反向传播)方法作为训练算法。最后的估计结果显示在表2中,我们可以发现很少的计算误差。
4. 径向配电网复合故障测距算法
零模的波速确定如上所述,初步故障距离XC是根据到达零模和线模的分量的波阵面之间时间戳的间隙算出。由于零模的波速的估计偏差,这种测距结果不准确。因此,准确的故障定位应采取进一步的步骤如下。
(1) 零模行波的速度由BP神经网络方法确定。
(2) 公式(6)是指零距离和空中模态分量之间的故障距离和到达时间间隔之间的数学关系。
V1是线模分量波速度,V0是零模分量波速,TC1是线模分量到达时间,TC2是零模分量到达时间,XC是初步的故障测距。
(3) 公式(7)是一种基于单端行波的天线模态分量的故障距离计算公式[21]。
故障距离/公里
图2.零波速与天线模型的关系及故障距离
图3.零模波速与行波传播时间曲线图
其中1指初始波前和从故障点反射的波的到达时间。DT2指初始波前和从远端总线第一次反射的波到达时间差,V1是线模分量的波速度,L是故障馈线的长度,X为故障距离测量。公式(8)是由公式(7)推导的,它指的是两个到达时间戳之间的关系。
(4) 由公式(7)计算x = XC*DT1和DT2。
(5) 用小波变换通过分解天线模态分量。波的极大值显示初始波前的到达时间t,然后得到T 1,T DT2。如果XC指的是一个准确的故障位置,两模极大值点出现在T 1和T DT2,它们指来自故障点和远端终端总线的是反射波的到达时间。由于零模、双模数的波速误差,最高点将不会准确·出现在T 1和T DT2。
(6) 观察到的关于T 1和T DT2模极大值点的时间戳表示为DT10、Dt100,DT1000、和DT20 Dt200 DT2000,如图4所示。(t Dt10, t Dt20), (t Dt10 , t Dt200), (t Dt10, t Dt2000); (t Dt100, t Dt20), (t Dt100, t Dt200), (t Dt100, t Dt2000); (t Dt1000 , t Dt20), (t Dt1000, t Dt200), (t Dt1000 , t Dt2000)。任何组都满足(8),它被记录为反射波前的准确到达时间,用于进一步的故障定位。
(7) 组合选择公式(6)可进一步的计算X1和x2的故障距离。X1和x2平均值可确定最终准确的故障定位。
5. PSCAD/EMTDC仿真分析
单端的配电网110 kV电压等级的模型,利用PSCAD/EMTDC建立如图5所示。传输线模型采用频率相关(相位)模型。无论线路或电缆的瞬态或谐波行为是重要的,都是有用的研究[21]。网络包括三个馈线:MA、MB和MC,它们的长度分别为23公里、50公里和30公里。采样频率为10兆赫。
在这里,馈线几乎是几十公里,假设故障事件位于20米远的一个馈线。我们假设零模行波速度v0 = 2.75 105 km/s。
实验1
如果A相接地故障发生在馈线MB上,故障位置距离M 5公里,过渡电阻为100 欧姆。
故障发生时间设置为0.003。matlab输入PSCAD中的数据进行进一步分析。图6示出零和天线模式分量的电压波形。
图7(a)和(b)分别示出零电压和空模分量的电压瞬变的小波分析。模量最大点表示某些波阵面的到达时间。
(1)从图7看出,零和天线组件到达时间戳为 初步距离 。
(2) 他们指的是初始和从故障点到远端的反射波前的时间差。
(3)反射天线模式组件的波阵面的到达时间是由初始波前到达时间算出的。
估计零模分量波速不可避免地产生误差。从图6看出,到达波阵面有时间偏差,也就是说,模极大值点在标记线上没有出现。然而,在标记线周围观察到一些波阵面,它们分别表示为(1, 10, 1000)和(20, 200)。表3示出图8(a)和(b)和图7(b)t中观察到的初始波前之间的到达时间差(t=3016.9 ls)。
所有基于(10, 100, 1000)和(20, 200)的可能组被表示为(10, 20)、(10, 200)、(100, 20)、(100, 200)、(1000, 20)、(1000, 200)。它们分别指故障点和远端端总线可能反射的波前。有用组由Eq.(8)选出。它是指从故障点到远端总线的实际反射波阵面。
每组的计算误差都列在表四里。
故障距离由等式7计算得到,
准确的故障距离x1和x2的平均值,x=(x1 x2)/2=4.995km,绝对误差是5米。
实验2
如果接地故障发生在馈线上,故障距离为35公里,过渡电阻为300欧。故障发生时间为0.005秒。
同样地,初始故障距离可以根据零初波和线模分量的到达时间差计算。XC = 36.75公里。Dt1 = 247.7 ls,Dt2= 89.3 ls XC。
到达初始波前时间戳T = 5118 ls,反射线模分量波的到达时间T+1 = 5365.7 LS,T DT2 = 5202.3 LS,他们用虚线标注在图9。从图9看出,波前可在标记线周围观察到,它们分别表示为(10, 100)和(20, 200, 2000)。表5显示图7(a)和(b)中观察到的明显波锋之间的到达时间差。
所有基于(10, 100, 1000)和(20, 200)的可能组被表示为(10, 20)、(10, 200)、(10, 2000)、(100, 20)、(100, 200)、(100, 2000)。有用组由公式(14)选出。表6列出了每组的计算和误差(14)。
以最小误差选取组(10, 20),10是指故障点初始反射波阵面,20是从远端母线初始反射波阵面。
图9.模态试验2中天线模态分量反射波前的到达时间
表5.标记波阵面与初始波阵面到达时间的差异
表6.按公式2计算每组误差
表7.不同故障类型的仿真结果
故障距离由公式(7)计算,X1 = 34.996公里,x2 = 35.002公里,准确的故障距离为X1和x2的平均值,x =(x2plusmn;x2)/ 2 = 34.999公里。它的绝对误差是1米。
表7给出了不同过渡电阻下不同故障距离下的仿真结果。在零模中波速度是一个常数,V0 = 275公里/秒。
6. 结论
(1)零模分量的波速取决于故障条件。故障位置的初步计算基于零和线模分量和到达时间差异波速度之间的关系
(2)采用初始故障测距方法从故障点和远端终端总线中选出反射波阵面。由于天线模式的波速是恒定的,因此初始反射波和反射波阵面都会产生进一步的故障定位。该方法对故障位置敏感。当它位于直线的中点时,两个波阵
全文共9852字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[9454],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


