基于V-Rep的机器人踝关节搭建及编程控制外文翻译资料
2022-09-08 12:32:34
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
2009年国际智能机器人与智能系统会议
2009年10月11~15日 美国 圣路易斯
三维自由度脚踝结构对于仿人类机器人的应用 S. Alfayad, F.B. Ouezdou, F. Namoun
摘要--设计和控制双足机器人依旧是一个开放性的问题。设计一个高功效,结构紧凑并且重量轻盈的踝关节被认为是最大的挑战。在行走中踝关节扮演者重要的角色,是设计和控制一个双足机器人平稳行走的第一步。在本文中将提出三种全新的自由踝关节机制。这些机械装置将使用液压驱动并使用电缆进行动力传输。这个计划的实现需要遵循几何和生物力学的规则。首先,几何和动力学发展的比较完备。已经利用亚当斯软件执照出仿真部件并且被用作设计不同尺寸的零部件。奇点研究已经详细的展示了这个新的解决方案的优势。控制方法已经被提出并经过测试。最后生产的原型展示了他的功能。这个机械机构在法国INPT被授予国际专利。
- 前言
踝关节是两组机器人最核心的关节。这个关节必须在一个狭小的空间内产生较大的扭矩。在人体中进行三维运动,在行走机器人中也扮演十分重要的角色。在过去的几年里,有许多人形机器人诞生,例如HRP2,Qrio,H7,Wabian2,Lola和ROBIAN2。这些机器人都有关于踝关节的世界性的问题。首先,关节里有几个维度的运动?那些驱动技术被应用?很显然现有的答案都不能很好地解释问题。的确,上诉仿人类机器人都有脚踝,哪个“爆炸”是基于谐波传导装置的传动装置。为了驱动踝关节,上诉搜有的机器人都采用的电机驱动,是一种廉价并且易操纵的结构。但另一方面,因为踝关节需要在低速时产生高扭矩,就需要高比率的变速箱。因此便增加了执行器与关节之间的机械数量。而且,有限的体积也不允许上诉的结构膨胀。
另外一些机器人使用液压的驱动方式,例如Sacros公司生产的DB,CB。这项技术的优势在于直接产生高扭矩,可以减少机械数量,并且设计师可以尊重人类外形的约束。当然这种装置的缺点就是搜有中央液压系统的管道都要通过关节到达踝关节。
据可靠消息,新型液压装置由Alfayad 等人提出。这个方案让我们可以融合电子与传统液压的优点来驱动关节。
另外,我们在研究关节时,是受限于关节的运动维度的。很显然三维关节在制作仿人类行走机器人中起到十分重要的作用。但三维关节受限于体积。现有的机器人的关节只有两个维度。所以现有的挑战是在体积受限的情况下制作三维运动关节。
在运动学的观点,在HRP2,H7,ROBIAN2中的踝关节使用的是串行机制。这导致的缺点是第一个关节必须承受得起第二个执行器的重量。另一方面可以使用并行机构。在这种情况下,不同的执行器承受的负载是相同的。但在并行机制会增加基础的体积。当然并行机构比串行机构更加复杂,这是众所周知的。这个新的提议将尝试合并串行机制与并行机制的优点,形成一种新的机制。这就要求我们在体积限制的情况下重新组装并行与串行机制,并且利用抑郁操纵的模型来实现三维运动关节。本文将展示我们研发的新型液压驱动踝关节于仍在研发当中的仿人型机器人HYDROiuml;D上的实验成果。本文分为五个部分。在下一阶段,被提出的方案必须满足踝关节的几何结构,速度等要求。在第三阶段,将会实现运动机理的分析。然后它的运动学特性和其他问题将得到解决。在第四阶段,基于模拟工具在早期做尺寸标注的亚当斯软件被提出。系统使用的控制循环十分详尽。仿真表明软件许多新颖的属性被提出。最后在第五阶段,将给出初步概念的机械结构。然后利用最初的实验结果,机器人HYDROiuml;D真正的原型制作机制被提出。最终的结论以及更加长远的发展将被列出。
二. 踝关节设计的主要限制
1,几何约束
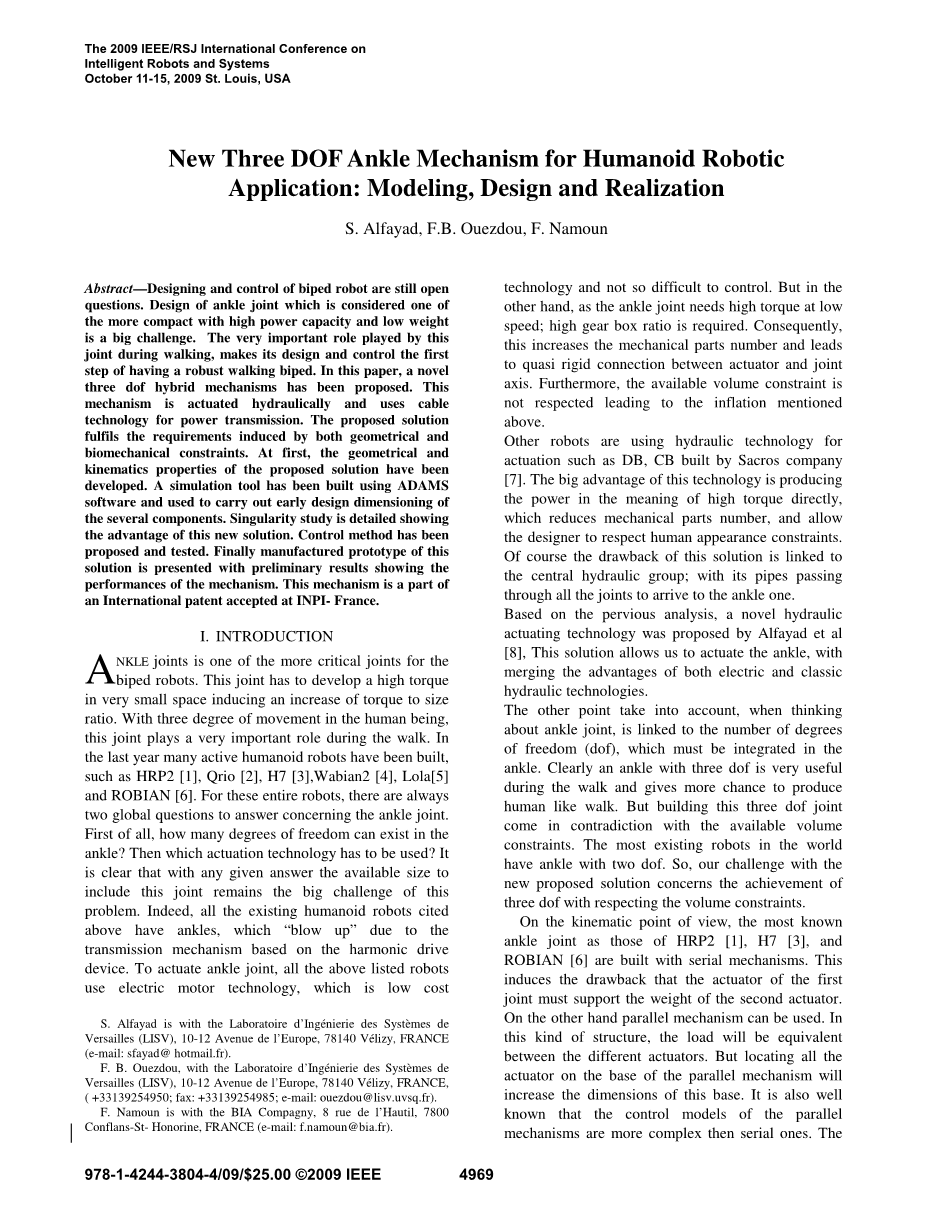
为了确保人类的外形以及人与机器人之间的沟通,我们的HYDROiuml;D机器人选择1.6米高,重50千克。为了满足质量,惯性和几何的限制,汉纳范修改的模型被使用。输入给模型的是机器人的高度和总重量,输出的是所有的重量,惯性,尺寸,重心的位置和近似几何的形状,几乎所有的关于机器人的数据。基于求这个模型,脚表现为平行六面体,胫骨是缩短的圆锥体。
表格1显示的是踝关节的相关参数。
基于物理特性级阿巴巴等人,胫骨的重心越接近膝关节,行走所需要的能量越少。此次提议将寻找尽可能靠近膝关节的重心位置,我们将在下一章节进行详细阐述。
2,运动范围,速度以及转矩束缚
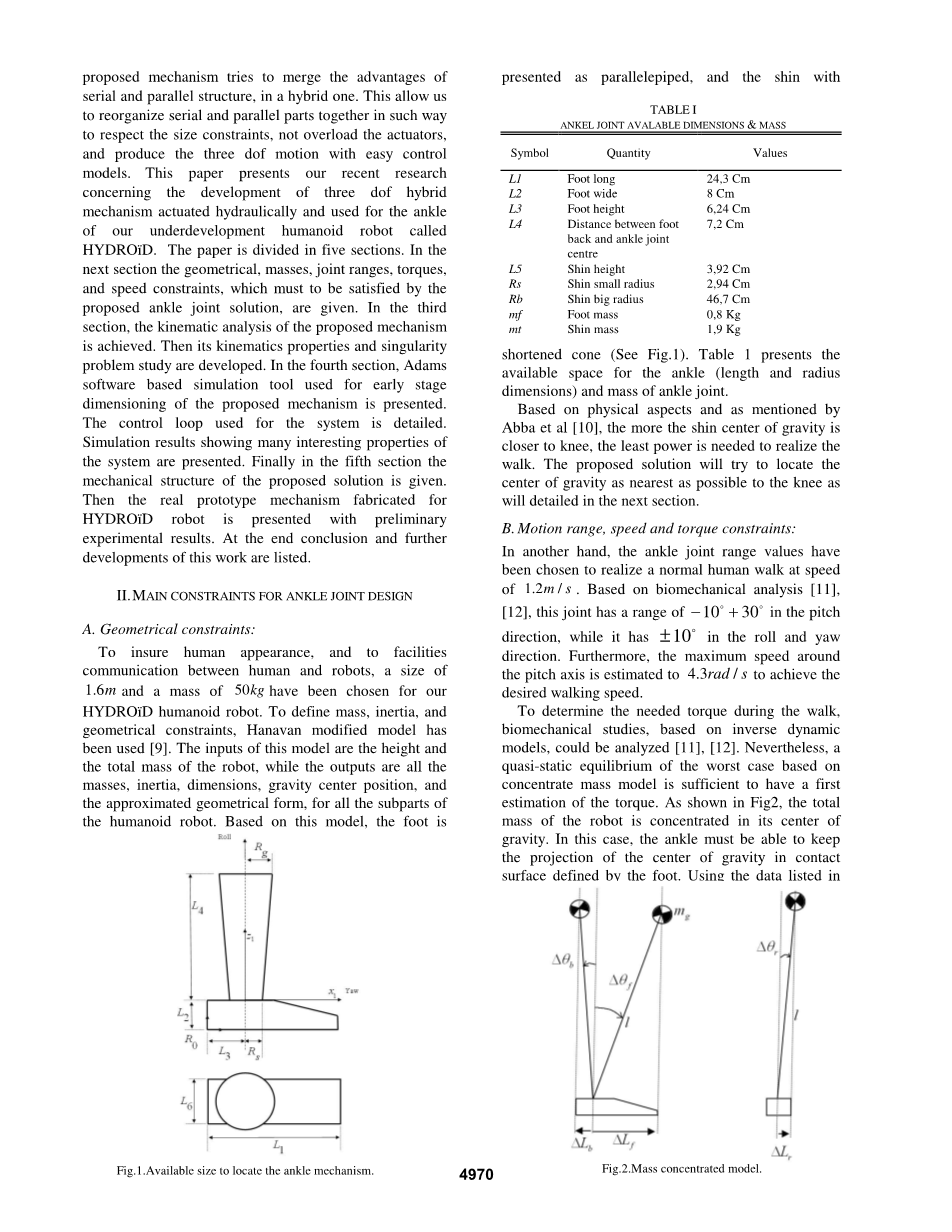
另外,踝关节的设定参考了人类的步行速度1.2米每秒。基于力学分析,关节有-10度到30度的转动范围,并且有正负10度的偏差。此外,最高转速被限制在4.3转每秒来模拟人类行走速度。
为确定在行走中需要的转矩,会基于逆动态模拟的生物力学进行研究。在图2中展示的,机器人的总重量集中在重心位置。在这种情况下,踝关节必须满足重心对地面的投影落在脚所覆盖的区域内。使用表格中的数据,踝关节在倾斜方向必须能够承受85Nm的扭矩,在另外两个方向大概承受20Nm的扭矩。
三. 新的混合动力踝关节运动分析
我们的目的是为新的机制创建一个模拟工具,能够让我们完成初始的尺寸标注工作。这样,我们就必须达到初步概念中几何和动态模型的要求。一旦动态结构确定,这两项指标就必须确定下来。基于上述限制,我们制定了一个被认可的合成过程。这个选择的灵盖在下一节介绍。
1,运动结构设计
一旦踝关节所有限制被列出后,那么设计理念就很明确了。为了构建球形的踝关节,必须构建三个具有相交轴点的节点。正如图片1所示,踝关节的中心位于(x0,z0 )平面上的(L1,L3)点。这意味着脚踝三轴线的交点必须在这个点上。理论上,这三个旋转的叫踝关节的交点可以指向任意方向。然而,为了尽可能减少三个节点之间的耦合并且降低各自在轴线上最大范围的运动,旋转轴心指向被规定为与转轴平行,偏离,倾斜的方向在最初的位置。(见图1)
此时,困难变成了如何在让旋转的踝关节旋转轴心偏离,倾斜的方向以及在实际大小的限制下来固定三个旋转的接头。根据图片1分析,理论上可以使用的体积为大小是(L4 , Rs , Rb )。最终决定不使用脚的有效大小来固定旋转节点的位置。这是基于三点考虑。首先,脚是机器人需要移动的部分。其次,可移动的部分应该尽可能接近膝关节。最后,为了在脚里集成一体化触摸传感器,就需要足够的空间。显然这是一个巨大的挑战。
首先安置垂直关节,这个关节可以被安置在垂直方向上的任何位置。为了确保整个装置的重心接近膝关节,第一个关节的位置被选在短锥的顶端。第二和第三关节的方向分别指向x和y。考虑到他们的重量,这些执行器必须被安排在斜截锥的最高点。这就为将踝关节安置在轴线上预留了充分的空间。相似的解决方案将会被利用在如何将整个装置安置在靠近膝关节上。当然在执行器与关节直线传输信息是接卸部分的关键。并且,这两个选装的关节具有一定的旋转角度限制,并没有完整的圆形旋转,所以选择电缆传动装置。电缆具有笔译结成团块,弹性好的优点,能在其中发挥很好的作用。另一方面,由于电缆只能拉伸(不能压缩),所以两个旋转的关节都需要电缆。而且,鉴于在垂直方向的空间十分宝贵,现行的执行器可以被用作制造更加苗条的踝关节。图片3显示的是简化的机理素描图。
根据上文,谁呀机制是制作一盒自然地顺从机智的关键。用转矩的方式传递信号也可以减少结构的数量。另一方面,使用新型的液压系统,每个关节将有它自己的微型泵。
2,逆几何模型
为了确定几何数值的变量,便需要IGM。这就要求我们找出线性致动器在各个方向的的最大范围。要做这个,就要设计这个机理的运动结构,如图4所示。使用电缆相对要晓得长度,电缆的建模为两个球形关节。
为了执行IGM,需要采用几个注释。jth 闭环运动链被定义为当j 1,2,3,4时的 Loop j
机理输出分为 q (qs , q f , qv ) 。依据已知的的数据才能获得这些角度。机理的输入为当
j 1,2,3,4时连接链r1的位置。在j th中ith的旋转角度被定义为jr j , q。是主动变量当所有的角度是被动时。事实上这些电缆被放置在两个地点,r1 ,r1 和r1 ,r1 给真正的联合。
为了建立IGM,等价的相当于停止z5 节点(见图4)。提出被开发等效开放机制的几何模型。最后一接下来的方式提出来IGM。
对于Loop1 和 Loop3:
然后这两个活跃变量可以被写成r1 l0 l2 l4 .Sqs d.CqsCqf l3 C2 C3
当Ssin(),Ccos()。这几个长度的定义在图片4可以看到。另一方面,对于Loop2
Loop4 具有相同的关系。之后同样。
3,运动学模型
这一段的目的是建立球形运动学之间的变量。矢量X (r , y , p),主动变量在 r (r1,r1 ,r1 ,r1 ,qv ).
这个关系表示为 i 是导数。
R1是活跃变量的闭环。我们可以定义反螺旋变量命名为Ri。
因此,方程的解为
根据结果,加上选择A j ,便得到接下来的结果
脚的运动结构相对基础。Rb 可以被写成
基于混合结构的优势,所以四个闭环运动模型可以表示为
方程9有以下的矩阵公式另一方面,运动学变量x可以写为
然后记做所以,基于以上公式及运算结果,可以建立出脚踝的机制。
4,奇异性分析
上面是第一个可以建立在运动模型上的分析。更深的,机智的最终设计应考虑这些重要方面,将会影响整个系统的运行效率。分析DABC矩阵,矩阵D可以等价为det(D) cos(qs )所以第一个奇点发生在
另一方面,基于机器人踝关节的对称。我们可以建立以下表达式表示AB矩阵。
基于上式,得到奇点这个研究显示建议的机制工作在远离奇点的位置。
5,仿真工具和结果
1,仿真工具
基于建立IGM和运动学模型,使用ADAMS建立模型已经实现。实质量,惯性,规模大小,必须集成仿真工具。另一方面,基于生物力学数据,人体行走的速度为每秒1.2米。行走时校对地面的作用力被计算出来。这些作用力会直接作用在脚踝上。
为了能在正确的方向提出脚踝的机制,基于逆向控制电路和几何运动学,并运用PID,已经被建立了。输入值为
2,仿真结果
第一个结果表明确定变量是长度变量。我们应该注意到,恒压值,应增加来增加踝关节产生的扭矩。的值是在可用的空间内取最大值。另一方面,一旦选择了一个数值,表面额定转矩便被确定下来。随着建模为截锥,确定下来的转矩值将会得到,这个活塞必须满足几何上的约束。获取的数值将会用于HYDROiuml;D机器人。
一旦IMG被建立,并且确定的转矩被确定下来,线性致动器的最大变异便可计算出来。确保满足几何约束,这些小的数值显示这些建模的缺点。
图片8显示了脚踝在行走步态仿真过程中,由控制器实现的踝关节角度。图片8显示了需要测量的亚当值。
另一方面,在前期标注的过程是非常重要的,涉及关节的力量。这些力固定的几何形状和材料性能,应选择为最终的原型。图9给出了力的大小以及这种关节力未知的例子。
最后,重要的是要确定总的力量。这将会混合所谓的压力值。图片显示该运动涉及到脚的力量反应的踝关节屈曲/伸展。
6,机械设计的原理
1,机械设计
在不同的阶段进行了仿真,基于前面的分析,设计了新的机制,在图3和图4所示。的详细介绍了三维绘图的TH电子建议解决方案。G1是膝关节的基础部分,第一旋转接头 ,qy直接与一个集成的旋转液压马达激活。CH1、CH2、CH4目前这种液压旋转电机的固定部分,CH3和CH6形式。
实现旋转关节轴的俯仰
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[146376],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、开题报告、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。


