对行星齿轮自由振动独特属性的特性分析
本文开发了行星齿轮的分析模型,并用它来调查他们的固有频率和振动模式。 该模型承认三个平面度每个太阳,环,运载器和行星的自由度。 它包括关键因素影响行星齿轮的振动,如陀螺效应和时变刚性湖。 对于线性的,时间不变的情况,检查相关的特征值问题揭示了振动模式的明确结构,其中特殊的地方结构是由行星齿轮的循环对称引起的。 振动模式是分为旋转,平移和行星模式。对每种模式的特性进行详细的分析研究。 对于每种模式,导出降阶特征值问题。
1介绍
行星齿轮用于各种机械应用 - 诸如汽车,直升机和飞机引擎等阳离子到它们的紧凑性,高扭矩/重量比并且减小轴承负荷。 尽管它们有其独特的优势,但在应用中这些齿轮噪音和振动仍然是关键问题。 在一些直升机中,行星齿轮的振动就是这样,机舱噪音的主要来源可以超过100分贝(Krantz,1993年)。
1990年以前,关于分析型行星齿轮动力学的文献很少。 Cunliffe等人(1974)研究了十三自由度系统和确定固有频率和振动模式的特征值问题。 Botman(1976)研究了一种用于十八个自由度直齿轮行星齿轮的振动模式。载体旋转的影响行星轴承刚度在固有频率上的变化数值研究。普拉特等人。 (1983)扩展了Botman#39;s自然频率分析包括不平等的行星刚度。近年来,卡赫拉曼(Kahraman,1994a-d)提出了一系列关于行星齿轮动态的论文。他导出了一个非线性,随时间变化的平面动力学模型(1994a)将其扩展到三维并检查影响行星阶段对动态响应的影响(1994b)。使用这些模型,Kahraman 和Blankenship(1994年c)研究了行星之间的负载分配和网格相位调整。 Kahraman(1994d)将他的模型简化为纯粹扭转的模型来预测固有频率和振动模式。其他关于行星齿轮动力学的研究包括网格刚度变化和荷载分担(Kasuba and August,1984)以及某些设计的影响牙齿加载参数(Saada和Velex,1995)和网格参数激励(Velex和Flamand,1996)。
未考虑行星齿轮自由振动的系统表征(尽管使用了这个术语行星齿轮,这项工作实际上解决了任何配置行星齿轮的问题)。本文的目标是分析研究通用行星齿轮固有频率谱和振动模式。行星的周期对称性齿轮导致高度结构的自由振动特性在此确定。了解固有频率频谱允许调谐系统频率以避免动力系共振。彻底识别振动模式对自然频率灵敏度的响应分析和计算至关重要(Lin和Parker,1999)。首先给出模型的简要说明。为样板系统给出了线性时不变情况下的特征解。所识别的特性然后在数学上被示出为普通行星齿轮的特性。
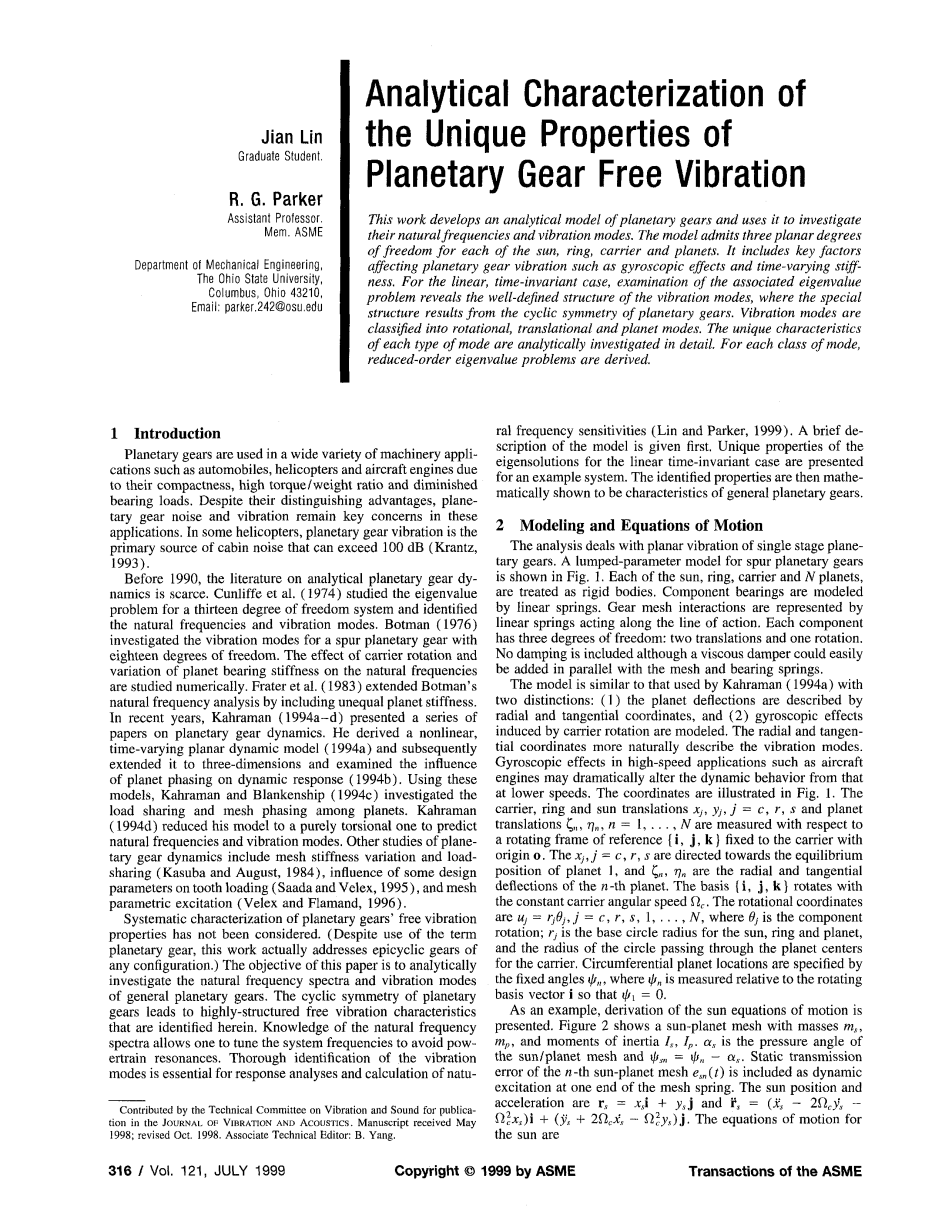
分析涉及单级行星齿轮的平面振动。 直齿轮行星齿轮的集总参数模型如图1所示。每个太阳,环,载体和N个行星,被视为刚体。 组件轴承已建模由线性弹簧。 齿轮啮合相互作用表示为线性弹簧的作用线。 每个组件有三个自由度:两个翻转和一个旋转。尽管粘滞阻尼器很容易,但不包括阻尼与网格和轴承弹簧并行添加。
该模型与Kahraman(1994a)使用的模型相似,有两个区别:(1)行星的偏转用径向和切向坐标来描述;(2)模拟了由载体旋转引起的陀螺效应。径向和切向坐标更自然地描述振动模式。飞行器发动机等高速应用中的陀螺效应可能会显着改变低速时的动态特性。坐标如图1所示。机架,齿圈和太阳轮平移xj,yj,j = c,r,s和行星平移zn,eta;n,n = 1 ...... N相对于参考{i,j,k}原点o。 xj,yj,j = c,r,s指向行星1的平衡位置,zeta;n,eta;n是第n个行星的径向和切向偏转。基础{i,j,k}以恒定的载波角速度Omega;旋转。旋转坐标是,j = c,r,s,1 ...... N。分量旋转在哪里;是太阳轮,齿圈和行星轮的基圆半径,以及穿过行星中心的圆的半径。圆周行星位置由固定角度指定,其中以便相对于旋转基矢量i进行测量。
举个例子,提出了太阳轮运动方程的推导。 图2显示了质量为ms,mp和惯性矩为IsP的太阳行星网格,Ip是太阳/行星网格的压力角。 第n个太阳行星网格的静态传播误差作为动态激励包含在网格弹簧的一端。 太阳的位置和加速度是。 太阳运动方程是整个论文中求和指数n从1到N的范围。 表示第n个太阳行星网状弹簧的偏转。 是施加在太阳上的扭矩。 在(1)中,并且是科里奥利加速度。 结合其他组件的类似术语,它们导致系统中的斜对称陀螺矩阵G.
图1. 行星齿轮集中参数模型和系统坐标。 所有平移坐标xj,yj,j = c,r,s和zeta;n,eta;n,n = 1 ...... N关于以恒定载波速度旋转的帧{i,j,k}
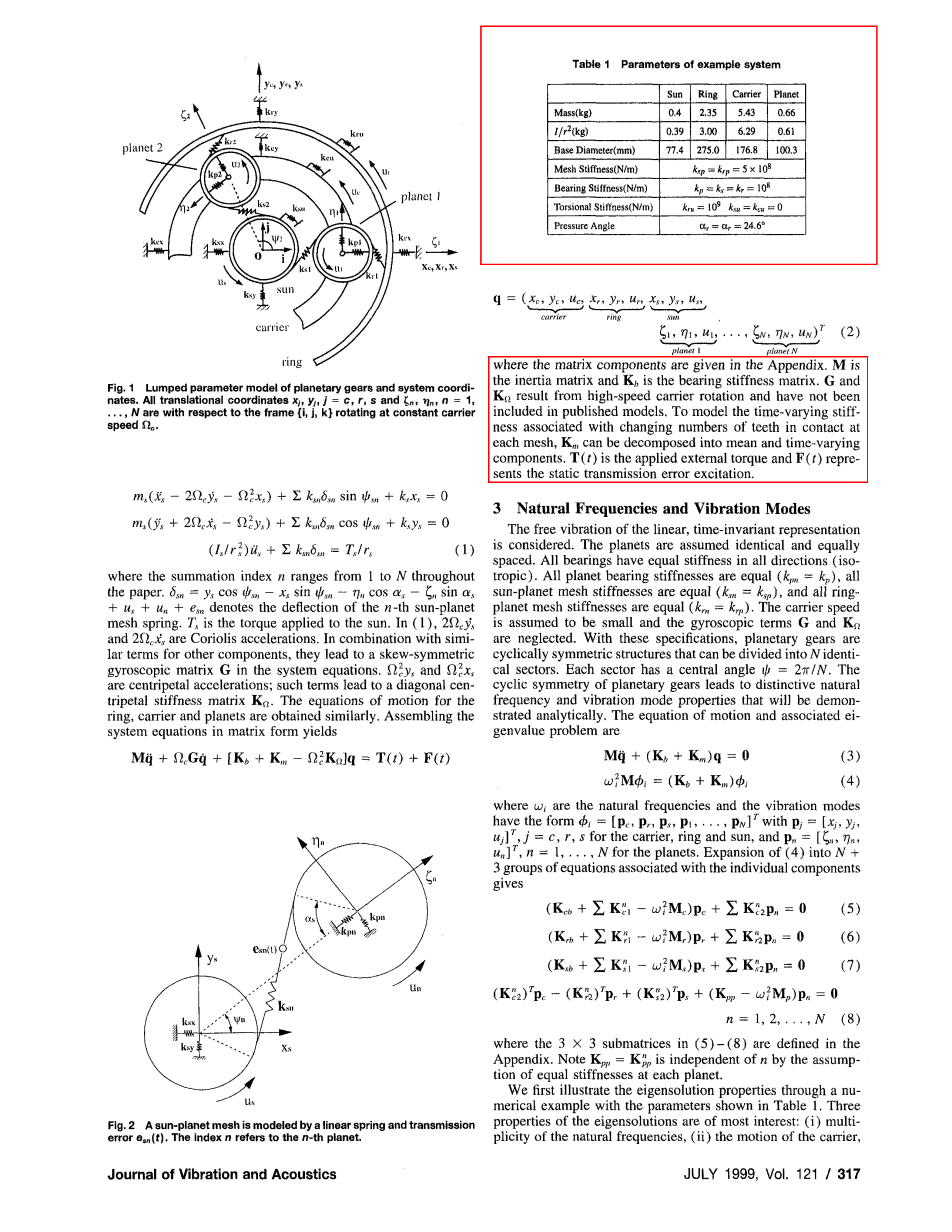
表1.例子中的参数
q=(xc, yc, uc, xr, yr, ur, xs, ys, us,,,u1,hellip;hellip;,,,uN)T (2)
carrier ring sun planet 1 planet 2
矩阵组件在附录中给出。 M是惯性矩阵,Kb是轴承刚度矩阵。 G和高速载体旋转导致的结果,并未包含在已发布的模型中。 为了模拟与每个网格中接触的牙齿数量变化相关的时变刚度,Km可以分解为平均和时变分量。 T(t)是施加的外部扭矩,F(t)表示静态传输误差激励。
3种自然频率和振动模式
考虑线性,时间不变表示的自由振动。这些行星被假定为相同且等距。所有轴承在各个方向上具有相同的刚度(各向同性)。所有承受刚度的行星相等(kpn = kp),所有太阳行星网格刚度相等(ksn = ksp),所有环行星网格刚度相等(krn = krp)。假定载体速度很小并且陀螺项G和被忽略。根据这些规格,行星齿轮是循环对称的结构,可以分为N个相同的扇区;每个部门都有一个中心角。行星齿轮的周期性对称性导致独特的自然频率和振动模式特性,这些特性将通过分析论证。运动方程和相关的特征值问题是固有频率和振动模式的形式,其中pj = [xj,yj,uj] T,j = c,r,s为载体,ting和sun,而pn = [,un] T,m = 1,......,N为行星。将(4)展开成与各个部件相关联的N 3个方程组给出
(5)
(6)
(7)
n=1, 2, hellip;hellip;, N (8)
其中(5) - (8)中的3times;3子矩阵在附录中定义。 注意与每个行星均等硬度的假设无关。
图3.典型的振动模式 没有显示载体和环的移动以澄清数字。 虚线是平衡位置,实线是偏转位置。 点代表组件中心。
我们首先通过一个数值例子来说明特征解的性质,参数如表1所示。本征解的性质最引人关注:(1)固有频率的多重性,(2)载体,环和太阳的运动, 和(3)行星偏转pn之间的关系。 典型的N = 4的振动模式如图3所示。 表2列出了不同数量的行星N = 3,4,5的固有频率及其倍数。 从表2和图3可以得到一些有趣的结论:
- 对于不同的N,六个自然频率总是具有m = 1的多重性。除零自然频率外,其值随着引入附加行星而增加。 它们的相关振动模式具有载体,环和太阳的纯旋转(图3(a)),所以这些模式被称为旋转模式。 在旋转模式下,所有行星都具有相同的运动和相位移动。
- 对于不同的N,六个自然频率总是具有m = 2的多重性。一些自然频率单调递增,而另一些自然频率随着N增加单调递减。 载体,环和太阳在相应的振动模式下具有纯粹的平移(图3(b)),所以这些模式被定义为平移模式。
- 三个固有频率具有多重性m = N-3,并且只有在Ngt; 3时才存在。 这些固有频率独立于行星的数量。 它们的相关振动模式被称为行星模式,因为载体,环和太阳不会移动:只有行星运动出现在这些模式中(图3(c))。 对于这三个固有频率中的每一个,相应的振动模式跨越N-3维特征空间。
这个例子表明,最多有15种不同的自然频率:更多的行星只会改变行星模式固有频率的多样性。 当N lt;3时,由于循环对称性的损失,所有固有频率都不同,并且振动模式没有特殊的结构。 在几乎所有的行星齿轮设计中,三个或更多的行星被用来利用行星之间的负荷分配,随后的讨论仅限于这种情况。 在下面的章节中,在实例中确定的特征解析特性在分析上表明对于一般行星齿轮来说是正确的。 另外,对于每类特征值解,都可以得到一般特征值问题(4)的简化形式。
3.1行星模式具有以下特点:(1)相关的固有频率具有多重性N-3。(2)载体,齿圈和太阳轮的平移和旋转为零,pj = [0,0,0] T,其中j = c,r,s。(3)行星偏转是第一个(或任何其他任意)行星的偏转分量的标量倍数,即,其中是标量()。
因此,候选行星模式具有这种形式
=[0, 0, 0, , ,hellip;hellip;, ]T (9)
如果(9)中的是振动模式,它必须满足(5) - (8)。 将插入(5) - (8)得到
(10)
(11)
(12)
n=1, 2, hellip;hellip;, N (13)
(10) - (12)上的代数运算产生了对的三个独立约束
(14)
(14)的满意度确保满足(10) - (12)。 方程(14)是未定方程,其中为N-3组独立解。 (13)的特征解对于任何n都是相同的。 对于由(13)得到的三个本征解中的每一个,根据式(9)可以构造N-3个独立的振动模式,其中由(14)确定。因此,(9)中的是振动模式并且具有简并度N-3。 对(10) - (14)的考察突出了行星模式的几个有趣特性:
表2.自然频率(Hz)对于不同数量的行星N具有多重性m
图4. 和成立时的行星模式。该航空母舰的顶点上有一个带有行星的正方形。 箭头表示行星偏转的质量特征,数字表示运动的相对幅度。
(1)如果且,行星模式是由下列特征解得到的:(13)其中,i = 1,2,3。当所有行星分别在三种行星模式中执行纯切向,径向和旋转运动时。 图4显示了一组行星模式。 因为径向模式和旋转模式彼此耦合,但切向模式仍然是纯切向的。
, ,
(2)(10)的左侧表示由行星偏转施加在载体上的合力和力矩。 方程(10)表明行星运动向载体传递零净力和力矩。 这与在这些模式下具有零转换和旋转的载体组成。 同样,施加在环和太阳上的净力和力矩为零。
(3)当N为偶数时,总是(14)的解。 在这种情况下,相邻行星异相移动(图4)。
3.3平移模式
翻译模式具有以下特点:
- 相关的固有频率具有二重性。所以有一对标准正交的振动模式对应于每个固有频率。
- 载体,齿圈和太阳轮的旋转为零。 此外,退化模式和中的载体,环和太阳平移通过和相关,即= c,r,s。
- 一对振动模式的行星偏转与 (20)相关
和是和中第n个行星的偏转。I是一个识别矩阵和E。 方程(20)是一般循环对称结构中退化振动模式的性质(Thomas,1979)。 一对候选标准正交平移模式表示为
(21)
(4)类似于行星和旋转模式的方式。和分别被代入(5) - (8)以验证它们是(4)的特征解。 对于和,(5)的第三个方程都消失了:(5)的前两个方程对于和都产生相同的方程组
(22)
(23)
(24)
(25)
和是为了符号方便而引入的。 使用平移模式属性(2)和(3)产生
(26) 全文共6153字,剩余内容已隐藏,支付完成后下载完整资料
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[13855],资料为PDF文档或Word文档,PDF文档可免费转换为Word

