英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
关键词
Typhoon 台风
Wind-induced waves 风引流
Kuroshio Current黑潮
Numerical Navigation System数字导航系统
East China Sea 中国东海
摘要
强风,洋流以及风浪会影响船舶安全和航行成本。 为了避免这种严峻的海洋状况并利用有益的洋流,考虑到天气和海洋信息的准确船位非常重要。在我们的研究中,研究了东海黑潮海域强大的台风,以构建数字导航系统。现代天气和海洋模型将海洋风,风引起的海浪以及强烈的西边界黑潮海流信息结合在一起,然后提供给船舶操纵模型以构建船舶数值导航系统。利用这种方法可以定量地发现台风,风浪和洋流对船舶航行的影响。
1.简介
众所周知,天气和海洋状况(例如海风,海浪和洋流)对最佳航线的影响很大。提前大约一周的时间进行中等范围预报是优化跨海航行的最佳路线的基本条件。此外,对于避免大风浪天气,例如台风期,精确分析和短期天气预报是必需的。
东海是繁忙的运输区域,是从东亚国家到马来西亚海峡和苏伊士运河从东亚国家飞往南亚乃至欧洲国家的油轮,LNG船和货船等的重要地区。 随着全球变暖影响的增加,近年来该地区发生的热带风暴的数量和强度都越来越大。 此外,黑潮海流由于其高速性也会影响船舶的运输成本。
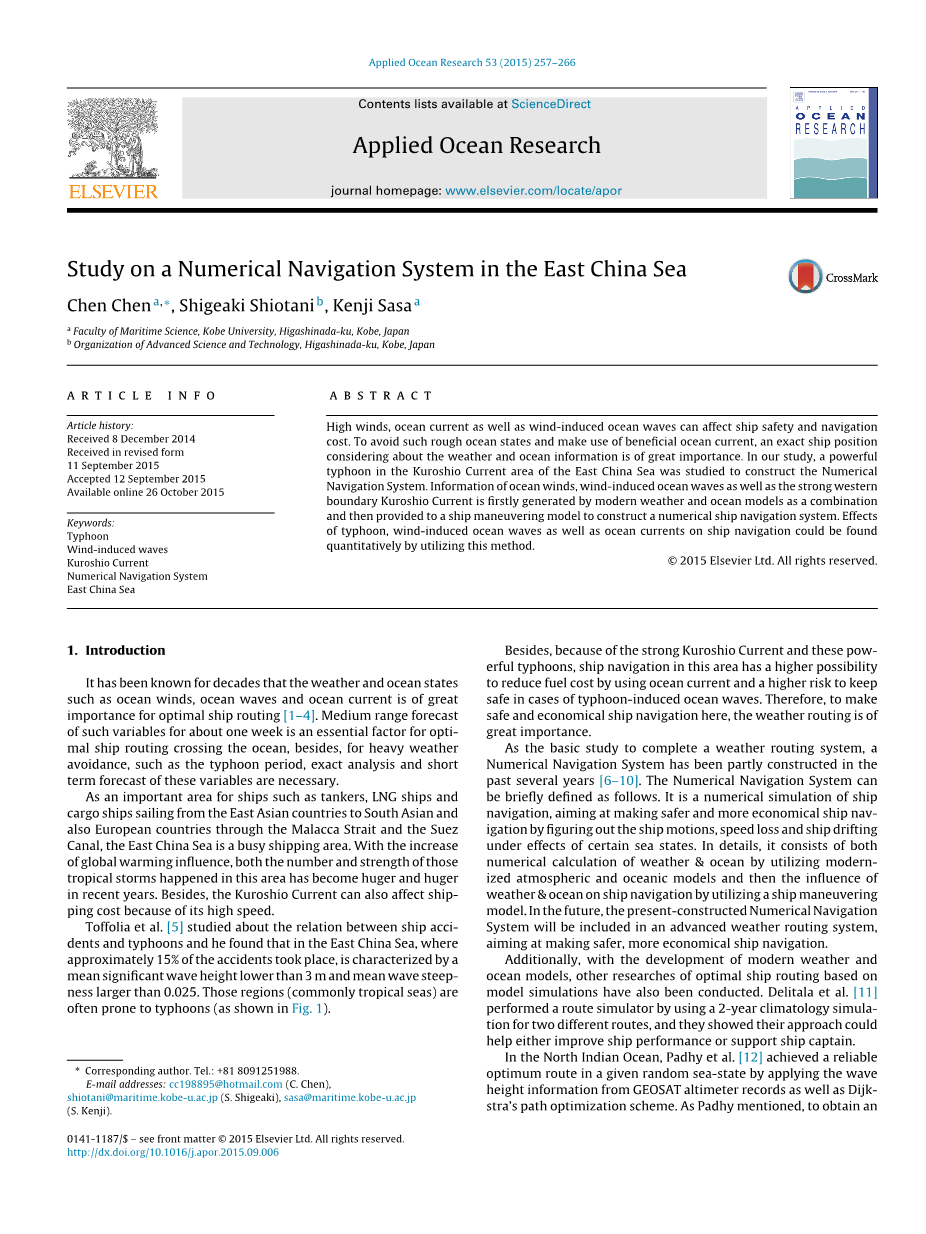
Toffolia等研究了船舶事故与台风之间的关系,他发现在东海发生事故率约15%的地方,其特征是平均显着波高低于3曼氏平均波陡度大于0.025。 这些地区(通常是热带海域)经常容易遭受台风袭击(如图1所示)。
此外,由于黑潮海流强和台风强大,该地区的船舶航行更有可能通过利用洋流来降低燃料成本,并且在台风引发的海浪情况下保持安全的难度也更高。 因此,为了在这里进行安全,经济的船舶航行,气象航线非常重要。
作为完成天气路由系统的基础研究,在过去几年中已部分构建了数字导航系统[6-10]。 数字导航系统可以简要定义如下。 它是船舶航行的数值模拟,旨在通过计算在某些海况下的船舶运动,速度损失和船舶漂移,从而使船舶航行更安全,更经济。 具体来说,它既包括利用现代化的大气和海洋模型进行天气和海洋的数值计算,再包括利用船舶操纵模型进行计算天气和海洋对船舶导航的影响。未来,将构建当前的数值导航系统包含在先进的天气路由系统中,旨在使船舶导航更安全,更经济。
此外,随着现代天气和海洋模型的发展,还进行了其他基于模型模拟的最优航路研究。 Delitala等通过使用两年的气候模拟对两条不同的航线进行了航线模拟,他们证明了他们的方法可以帮助改善船舶性能或帮助船长。
在北印度洋,Padhy等人通过应用来自GEOSAT高度计记录的波高信息以及Dijkstra的路径优化方案,在给定的随机海洋状态下获得了可靠的最佳航线。 正如Padhy所提到的,要获得最佳的船舶航线,包括天气和海洋建模,船舶运动以及合适的路径优化算法在内的几个重要部分是必需的。
在本研究中,选择在ECS中发生的代表性台风来定量研究风,洋流和风引起的海浪影响下的船舶航行。 考虑到在这种台风情况下真实船的航行实验的高风险和成本,这里将使用模型船来研究在这种天气和海洋状态下的航行。
文章的结构安排如下。 第2节介绍了风浪的模型仿真和验证。第3节给出了受天气和海洋影响的船舶航行的数值模拟。第4节分析和讨论了结果。第5节给出了进一步的讨论和简要概述。
2. 风浪模拟与验证
2.1 模型模拟
2.1.1天气研究和预报模型
这里应用的大气模型是天气研究和预报(WRF)模型。 这是一种中尺度气象模型,主要在国家大气研究中心(美)(NCAR),美国国家海洋与大气管理局(NOAA),美国国家环境预报中心(NCEP),预报系统实验室(FSL)和空军气象局(AFWA),海军研究实验室,俄克拉荷马大学和联邦航空局(FAA)。
该模型已广泛用于运营预测以及现实和理想化的研究实验。 WRF分布包括2种动力学求解器的选择:Nonhydrostatic Mesoscale Modeler(NMM)和Advanced Research WRF(ARW)。 这项研究利用ARW核心,该核心配置为具有物理方案和子网格规模过程的各种物理参数化的非静水压,完全可压缩大气模型,用于预测细观和微观尺度的运动。 该模型在sigma压力垂直坐标网格上预测三维风动量分量,表面压力,露点,降水,表面感热和潜热通量,相对湿度和气温。
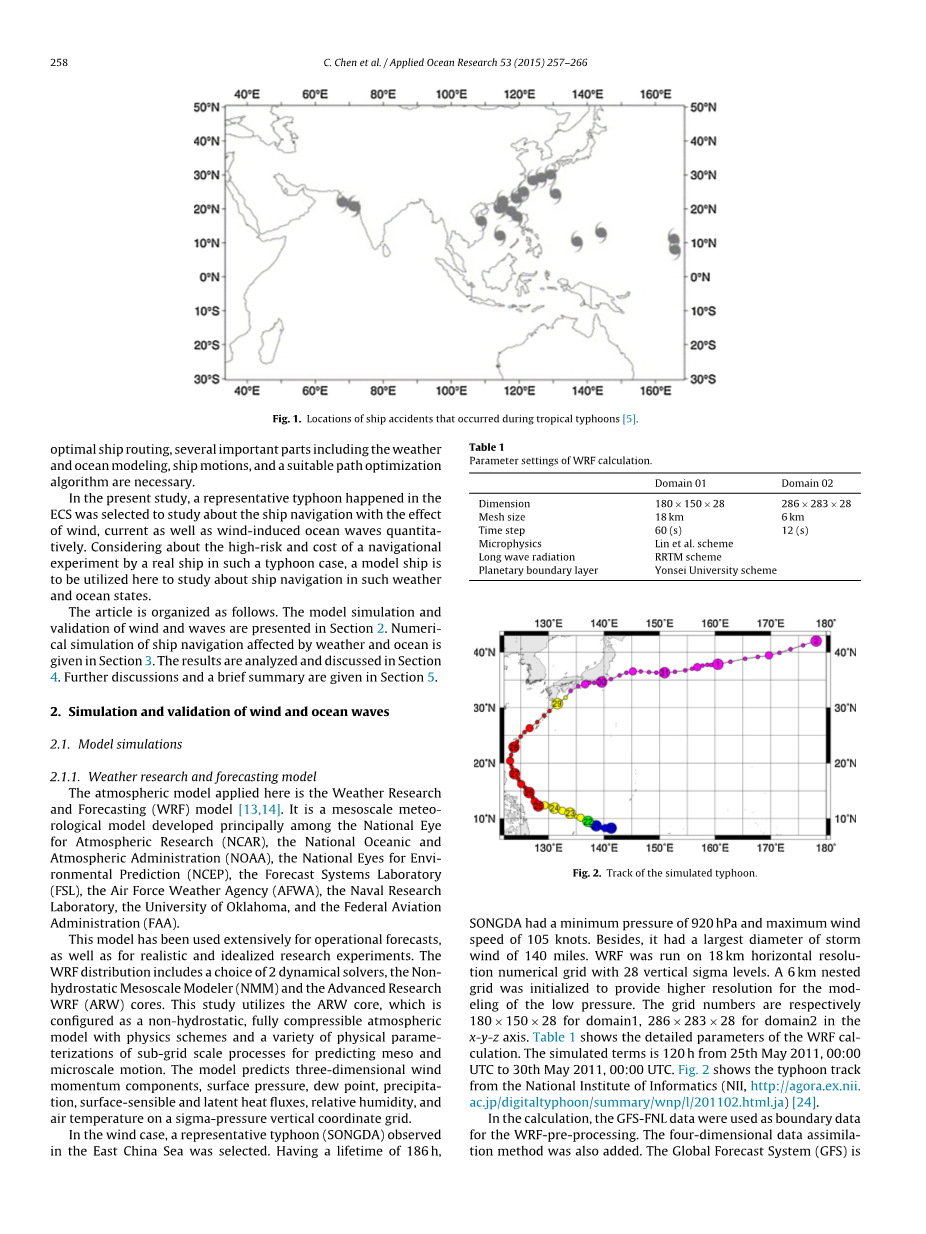
在风的情况下,选择了在中国东海观察到的代表性台风(桑达)。桑达的寿命总长为186 h,最低气压为920 hPa,最大风速为105节。 此外,它的最大暴风直径为140英里。 WRF在具有28个垂直sigma级别的18 km水平分辨率数字网格上运行。 初始化了一个6 km的嵌套网格以为低压建模提供更高的分辨率。 在x-y-z轴上,域1的网格数分别为180times;150times;28,域2的网格数为286times;283times;28。 表1显示了WRF计算的详细参数。 模拟期限是从2011年5月25日00:00 UTC到2011年5月30日00:00 UTC的120小时。 图2显示了美国国立信息学研究所的台风轨迹。
在计算中,将GFS-FNL数据用作WRF预处理的边界数据。 还添加了四维数据同化方法。 全球预报系统(GFS)每天在美国国家环境预报中心(NCEP)上近乎实时地运行四次。 每6小时将GFSFNL(最终)运行全局分析数据设置在1.0times;1.0度的网格上。 Kalnay等人给出了NCEP / NCAR项目和数据集的全部细节。
2.1.2 近岸模拟波
在近海模拟波浪(SWAN; [16])中,在此应用了代尔夫特理工大学开发的第三代波浪模拟模型来模拟受低压影响的波浪。 SWAN模型用于求解频谱作用平衡方程,而不受空间传播,折射,反射,浅滩,生成,耗散,白盖,风输入和非线性波-波相互作用的影响,而对频谱没有任何先验限制。 对于SWAN模型,使用的代码与用于WAM模型的代码相同。
台风诱发的波场不仅在科学上有助于理解风波相互作用的物理原理,而且在还可以操作上预测潜在的危害。 台风强烈而快速变化,形成一个复杂的海浪场,该海浪场可以从风暴眼传播数千公里,从而导致波场在时间和空间上发生巨大变化。 利用SWAN波浪模型成功模拟了台风下的波浪[17]。 作为一种非常重要的方法,海浪建模是获得定向光谱的时空分布的非常有用且便捷的方法,而没有与测量相关的限制。
WRF计算出的海面以上的风速被用作波浪计算的输入风数据。 三次样条数据插值方法用于生成适当的风场以匹配SAWN的时空分辨率。 SWAN模型设置为覆盖船舶导航区域的1 km分辨率。 模型中的最小水深为10 m,时间步长为5分钟。 波数网格从0.04到1 Hz除以30,波方向间距为6。表2给出了波计算的详细参数。
2.2模型验证.
2.2.1验证风计算.
为了验证模型的准确性,使用日本气象厅系统AmeDAS,通过在北原站(120ordm;428 E,26ordm;218 N)观测到的风验证了模拟的风数据。 风速和风向的验证值如图3所示。水平轴以小时为单位显示时间序列。 垂直轴分别表示风速和风向。 WRF的风速和观测值随时间变化具有相同的变化,但是,当北原站的压力达到最低值时,WRF高估了大约2 m / s的风速。
图4显示了WRF模型在相同时间和区域的10米风速分布,并模拟了船舶航行。 台风刚到成熟期,极端低压产生强烈的逆时针风。
2.2.2波浪计算的验证
计算区域中重要波高的分布也如图5所示。方向“从0到1100”的比例表示模型仿真中的网格数。 受约940 hPa低压影响,可以发现约12 m的最大值。
在图6中,通过每20分钟从NOWPHS(全国港口和港湾海浪信息网络)在Nakagusukuwanstation(127°57 55 E,26°14 32 32 N)中观测到的显着波高,验证了计算得到的显着波高。 SWAN波浪模型可以很好地计算出达到峰值后的有效波浪高度。 但是,SWAN高估了Nakagusukuwan站高峰时间附近的显着时间,这可能是由于附近那霸站(127◦411 E,26◦124 N)的WRF高估了风速的缘故,见图3。
3.数字船舶导航.
3.1船舶模型SR108
SR108型集装箱船(见“第二十三届国际拖航大会的最终报告和建议”),其详细的主要特性和车身平面图分别如表3和图7所示; 被应用于进行数字导航。
3.2船舶对海浪的反应
通过产生波反射或衍射来产生船舶阻力,在垂直方向上产生诸如升沉和俯仰的船舶运动以及上层建筑的风阻,这些都将导致船舶的速度损失。
如图8所示,SR108模型在海浪中的短时预测附加阻力,侧向力和转弯力矩是使用远洋航行研究计划系统[18]计算的,其中水平和垂直轴表示平均波浪周期(秒)和船舶响应值(KN)。 此处,该船的弗劳德数为0.2,船速为16节,有效波高设置为1 m。在船舶响应计算中,选择海浪作为ITTC类型,并将浪涌设置为Jonswap选项。对于风压,采用了广泛使用的藤原法[19]。 每30个从0到180的数字表示遇到从船尾到船首的波浪的方向。
3.3数值实验
在获得船舶对海浪的运动响应后,将船舶操纵模型MMG [20,25,27]应用于数字导航[10]。 为了定量研究风,风浪和洋流对船舶航行的影响,分别在台风接近,到达和离开船舶航行模拟区域时进行了几次实验。
根据台风眼在子午和纬向的风速变化,请参见图9,在第一种情况下,着重研究了船舶位置到台风眼的距离,以发现位置对船舶航行的不同影响,如图所示 如图10a。在第二种情况下,如图10b所示,分别研究了台风接近,到达以及离开船舶航行区域几个部分,以寻找避台风条件。
在情况1中,距台风眼在纬向方向上左右两侧的距离间隔设定为0.8度。在情况2中,在纬向方向上沿纬度方向的倾斜度为0.6度,而隐藏距离大约为0.8度。 子午线方向设定为0.5度。 详细的设置如表4所示。两种情况下船舶和台风的相对位置,黑潮当前的位置分别如图11的前两个图和下两个图所示。
将风速,风向,有效波高,平均波周期和当前速度输入到船舶操纵模型中,其空间分辨率为每0.01度。 在固定的螺旋桨旋转下,在平静水中以16节的速度在相应的船速下进行了约10小时的数字导航。
4. 天气和海洋对船舶航行影响的结果分析与讨论
4.1漂移角和航迹距离
如图所示。 参照图12和图13,给出了这两种情况的数字航迹。 水平轴和垂直轴分别显示经度和纬度。 对于图12,有色线是模拟的航迹,其中从左到右的十条线分别代表从L1到R5的起始位置。 对于图13,红色,绿色,蓝色和紫色线分别表示从A到D的轨迹。
4. 2单一天气和海洋因素对船舶的影响分析
4.2.1案例一
可以从图12的左上图看到黑潮海流的影响。当船舶遇到黑潮海流时,左5条航迹(从L1到L5)显示出在比设定航向000更右的航向航行的趋势。 东北风强劲。 虽然受到西向西偏北方向相对较弱的水流的影响,但右侧的五个轨迹(从R1到R5)倾向于向原始设置路线的左侧漂移。 此外,船在跟随黑潮(从L1到L5)航行时可以航行更长的距离,而逆着洋流航行会产生相反的影响(从R1到R5)。
对于波浪因数,图12的右上方图显示,头波会通过产生附加阻力而对推动船舶航行产生强烈影响,这会在相同航行时间段的情况下缩短船舶的航行距离。 当船驶近台风眼时,这种影响会更大,随着高度的增加,附加阻力会增加[21-23]。 此外,当相遇波的角度为090和120时,可以发现较大的漂移角,其中侧向力和转弯力更强。
对于风的影响,可以得出与波浪影响类似的结果。 如图12左下方的五个左图所示,由于船舶模型的上部结构,强风也可能产生较大的附加阻力,从而通过消耗螺旋桨提供的更多船舶能量来缩短航行距离。 但是,同一幅图的右5条线可以说明当船随风行驶时更长的距离。 与在左象限逆风航行相比,在右象限顺风航行时(见图10a)可以增加大约2节的速度。
4.2.1案例二
如图13的左上图所示,绿线和蓝线(B和C线)受东北黑潮的影响,而另外两条则表示该船受西洋海流的影响。
对于波浪效应,如图13右上方的绿线和红线所示,来自右舷侧的强大侧向力漂移到了相反的一侧(左为设定航向),并且波浪阻力也为 对航行距离的负面影响。
在图13的左下图中可以清楚地看到其相对于横向风力向另一侧漂移的趋势,该图中船舶漂移的逆时针方向与台风的风的分布非常吻合。
4.3不同因素对船舶的影响比较
为了定量给出更清晰,直接的结果,计算出的漂移角和轨道距离也可以从表5和图14中获得。漂移角由起点和终点计算得出。对于图14a和b;水平轴从1到10的数字分别表示从L1到R5的模拟轨迹。对于图14c和d;水平轴从1到4的数字分别代表从A到D的模拟轨迹。
与潮流的影响相比,风浪对船舶航行距离的影响更大,如图14b所示。在情况1的轨道L5和情况2的B中,可以观察到大约3节的速度损失,在这里,首向风和海浪形成强烈的阻力。从图14a还可以看出,当船舶沿着台风航迹的方向航行时,波浪往往会对船舶的漂流角产生更大的影响,然后对风产生更大的影响。 同一图中的绿线还表明,从L1到L5观察的海流对横向漂移的影响比从R1到R5的横向洋流的影响更小。
5. 简要结论和进一步讨论.
作为构建我们的数值导航系统的长久工作的一环,我们进行了本研究,以定
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[241398],资料为PDF文档或Word文档,PDF文档可免费转换为Word

