英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
利用有交通密度监测和无线控制系统的追日太阳能电池板节能太阳能街灯
医学博士 费杜斯·瓦希德1,塔斯尼姆·艾哈迈德2,国防部. 贾希德·哈桑3
Hajee Mohammad Danesh科技大学EEE系, 孟加拉国迪纳杰布尔
摘要:由于能源需求的增加,可再生能源的利用越来越受到世界各地研究人员的重视。 太阳能光伏是一种可再生能源 具有很大的潜力,因为它的丰富,易于获得,可兑换的电力和环境友好。 太阳能光伏系统和发光二极管(LED)已经成为一个新的发展方向 现在流行于街道照明的目的。 LED灯的使用是由于其较高的流明产量和较少的瓦特消耗。 因此,本文提出了一种节能太阳跟踪算法 基于交通密度监测系统的PV供电自动LED亮度控制路灯模型,采用nRF和GPRS技术进行无线控制。 基于微控制器的双轴太阳-t 机架系统和四个光相关电阻(LD R)传感器被用来保持太阳能电池板与太阳对齐,以最大限度地利用太阳能。 这条街很近 采用脉宽调制(PWM)调节LE D基路灯的管腔强度,以节省更多的能量。 我们还配置了n个RF和GPRS技术的系统,使我们能够手动操作和监控从远程地方无线的路灯。 因此,拟议的系统促进 远程监测和产生比固定太阳能电池板多20%的能量,同时减少LED每天消耗15.7%的功率。
关键词:太阳能光伏,LED,LDR,光强控制,交通监控,街道照明,GPRS,n射频。
I. 导言
如今,街道照明是城市基础设施的重要组成部分。它被用来在一天中的黑暗时间照亮街道。文明之初,街上的灯光非常简单,因为街道的数量和交通密度较少。因此,道路照明的功耗和安装成本较低。 但是,随着加大城市化,街道数量迅速增加,交通密度高。 这导致了路灯数量的增加和与之相关的投资。此外,街灯照明用电增加,这给市政[1]-[3]带来了很大的能源成本。我们知道,能源危机已经成为当今世界上最困扰现代文明的地方。 快速城市化正引领世界走向高能耗。另一方面,由于现有化石能源的减少,传统能源正在以惊人的速度下降。因此,现在是我们寻求新能源的时候了,以减轻世界各地的电力危机[4]。在这种情况下,可再生能源在世界各地都很受欢迎,因为它是自然可得、用之不竭、无污染的能源。 可再生能源的主要能源之一是太阳能。太阳能以其近乎于零的燃料成本、无污染、永不枯竭的能源优势,在世界范围内受到广泛欢迎。基于太阳能光伏的路灯照明系统在当今社会非常普遍,但缺乏自动化。自动化、成本效益和较少的功耗现在是技术进步的主要考虑因素。节约能源可以降低功耗,提高能源的利用效率[5]。 因此,利用现代照明技术实现太阳能可以节省更多的能源和减少开支。本文的目的是通过将现代技术结合起来,最大限度地利用太阳能储存,最大限度地减少路灯的能源浪费。
太阳能光伏转换是让我们在日常生活中使用太阳能的技术。它以直流(D C)形式产生电能[6]。 最大功率输出形式是可取的 一个太阳能光伏系统,以提高其效率。这样的太阳能光伏电池板在保持垂直于太阳辐射时产生最大的电力输出。为了保持太阳能光伏电池板与太阳位置的一致,太阳能跟踪器是世界上最合适和最普及的技术[7]。Oper loop太阳能跟踪器[8,91]采用一种算法或数学模型,使用特定地点的时间、日期和地理信息来确定太阳的方位角和仰角[10-13]。 但是这个系统必须持续监测,因为算法必须随着季节、天气或地点的变化而改变其离子。
器件(CCDs)[14-16]或的闭环太阳能跟踪器[5]被引入光相关电阻(LDRs)[17-19]以及自动化技术[20,21]来测量太阳的位置。因此,我们为我们的自动太阳跟踪器设计了一个带有微控制器和LDR传感器的闭环系统。的差异将两个LDR之间的传感器读数作为反馈误差信号,并将其与之前的误差信号进行比较,从而确定太阳能电池板的旋转方向。面板旋转,以最小化误差信号,从而使自己与太阳保持一致垂直,并达到最大的太阳辐射。太阳能跟踪器保持单轴[22-24]和双轴[25-27]结构。单轴跟踪器只从东到西跟踪太阳,而双轴跟踪器同时跟踪方位角和太阳的仰角。大多数太阳跟踪系统使用步进器[25,26]或直流电机[27,28]作为移动机构。但是我们在我们的双轴太阳跟踪的闭环模型中使用了伺服电机,因为不同于直流电机,伺服可以设定成特定角度旋转。也不像步进电机,他们可以保持高扭矩水平在高速。伺服系统可在80-90%的效率下运行,不受振动或共振问题的影响[29]。
此外,我们的目标是提供一个更好的解决方案,以尽量减少电力浪费或额外的功耗,增加的路灯的效率。交通不规律的街道不需要整晚都亮着灯。手动操作的路灯需要操作员的持续监督,而这通常是不可能保证的。此外,这样的系统不能根据需要调暗路灯。因此,我们需要一个自主的交通密度监测系统来进行改变LED灯的光强根据街道的交通密度[3,4]。所以我们使用了运动和超声波传感器利用我们的路灯系统监察交通密度。在传感器数据的基础上,由单片机产生PWM信号控制通过LED灯的电流,从而控制其亮度。一开始,灯会发出全亮的光。然后,根据在特定时间内通过极点的车辆数量,光线强度将自动降低。我们使用高效锂铁磷酸盐(LiFePO4)电池,而不是铅酸电池,以确保最佳的使用存储能量。因此,结合多种节能技术,该系统可以多产生20%的能量比固定的太阳能电池板,同时减少了15%的LED功耗每天。
我们亦为系统安装了无线技术,以监察多个路灯系统的情况在遥远的地方使用智能手机或个人电脑等手持设备进行远程操作。无线系统采用nRF[30, 31]和GPRS[33]技术进行通信。nRF收发器允许多个路灯单元一个区域之间的通信和GPRS模块可以上传数据从每个系统到一个在线服务器是可从世界各地通过互联网访问。因此,提出的路灯系统不仅保证了能源效率,而且同时便于远程监控,使系统智能化、人性化。
II.系统配置
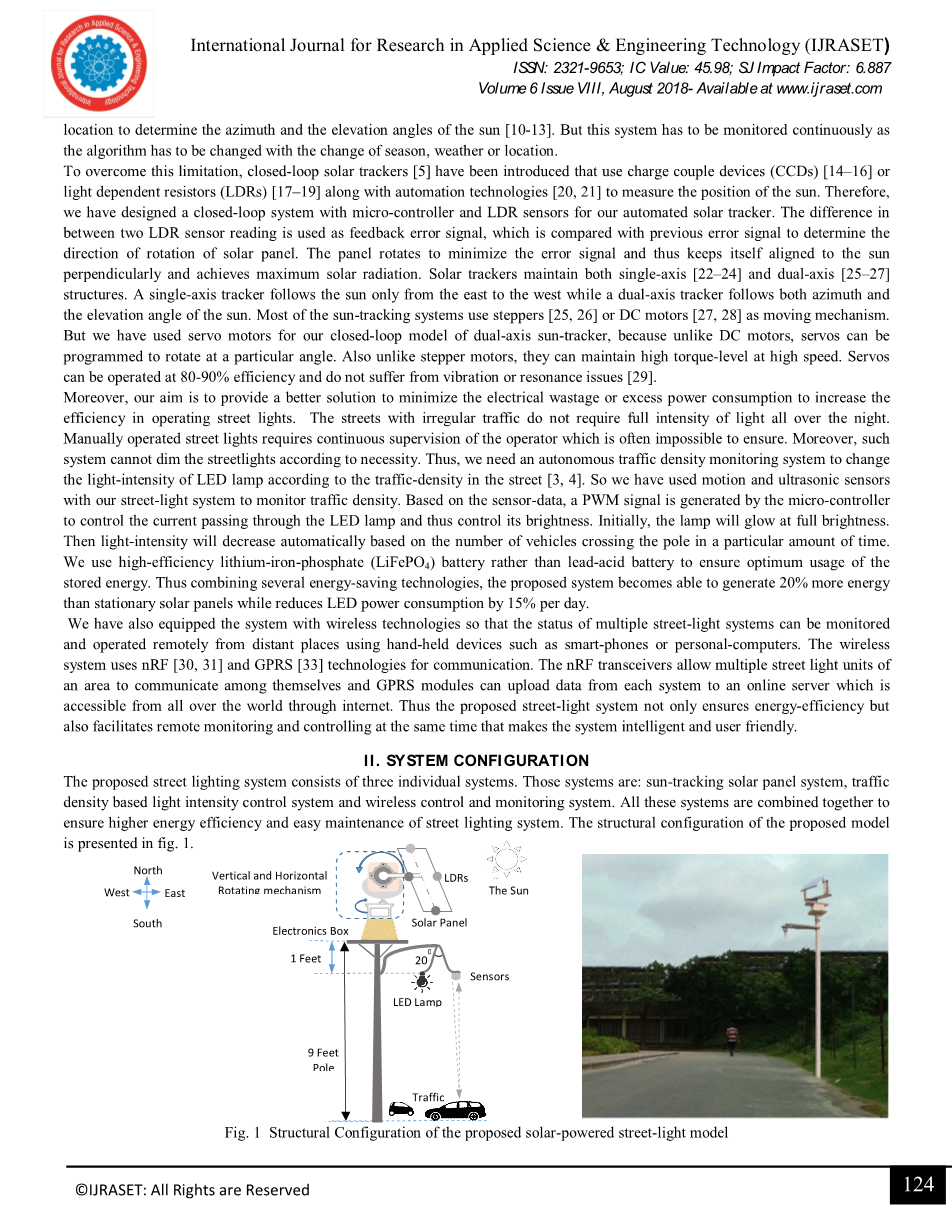
建议的街道照明系统包括三个独立的系统。这些系统是:太阳跟踪太阳能电池板系统,交通基于密度的光强控制系统和无线控制监控系统。所有这些系统结合在一起确保更高的能源效率和易于维护的路灯系统。提出的模型的结构配置如图1所示。
图一 太阳能路灯模型结构
九英尺高的杆支撑着整个系统的结构。A水平表面放置的钢管,在限制框中计数。双轴伺服电机这个盒子里有完整的电路来运行这个系统涉及微控制器、无线通信模块和LiFePO4电池。太阳能电池板安装在旋转装置上车轮的垂直伺服电机。LED灯和传感器被安装在两个不同的支架上,分别连接到灯杆和灯座上看台之间的水平角度大约是20度。图2的流程图代表了整个系统的运行概况系统。
图二 系统操作概述流程图
双轴伺服电机控制太阳能板的移动机构。水平伺服旋转面板南北垂直伺服将面板旋转到东西方向。根据图2的流程图,将伺服系统设置为初始状态最初的位置。垂直和水平伺服的初始角度分别设置为0度和90度,使旋转盘的起始位置变为向东。微控制器读取LDR传感器并运行太阳跟踪系统,当多个传感器检测到太阳光时,保持led灯关闭(0%脉宽调制脉宽比)。但是LED是通路状态(90% PWM duty-cycle)和交通监控系统开始运行时黑暗和不超过一个传感器可以检测太阳光。
III.我的方法论
路灯模型提出的三个子系统包括双轴太阳追踪太阳能电池板系统最佳太阳能存储,交通 密度减少能源消耗,照度控制系统和无线通信为基础远程监控系统在本节中我们将简要讨论这三个子系统。
A.太阳追踪系统
太阳跟踪系统的目的是让太阳能板一整天都垂直地对准太阳以确保最大的太阳能储存。整个系统的算法流程图如图3所示。
图三 系统的太阳跟踪操作流程图
在图3的流程图中,北、南、东、西LDR读数由符号RN、RS、RE和RW表示分别。术语“限值”被认为是LDR读数中微不足道的差异,为了简单起见,将其设置为0.1。的系统有四个依赖光的电阻(LDRs),分别放置在面板的两侧。东方和西方的LDRs是每日使用的
而北方和南方的LDRs是用于太阳的季节追踪。LDRs连接到10位ADCs提供传感器数据控制器。数字值这些值用公式(a)转换成模拟电压。
LDR的模拟电压=ADC数字值/ADC分辨率*电源电压......(a)
式(a)中,微控制器的5V输出电压源作为源电压,10位ADC的分辨率为1023. 因此,单片机读取LDRs的模拟电压,并在同轴差值时对伺服进行旋转LDRs超出了限制。垂直或水平伺服移动,以尽量减少东西方或南北之间的差异LDR分别读数。微控制器旋转两个12V伺服电机,产生两个8位PWM信号。
B.基于交通密度的光强控制系统
该系统的目的是根据交通密度来控制led灯的光强。的算法流程图系统如图4所示。
图四 基于光强控制的系统操作的车流密度的流程图
从图4可以看出,单片机一直读取PIR运动传感器的输出,直到检测到街道上的运动为止。一个
当检测到运动时,将初始化计时器。然后单片机继续读取声纳传感器的距离值,直到计时器完成计数15分钟。与此同时,只要距离值由于车辆的原因而从默认值减少通过传感器,微控制器等待100毫秒的值再次增加。然后考虑一辆车或一个人当距离值再次增加到默认值并将“车辆定位器”变量的值设置为1时,将进行计算。因此微控制器在15分钟内对通过极点的车辆数进行计数,并确定车辆的占空比根据表I控制led亮度的PWM信号。从图4可以看出,单片机一直读取PIR运动传感器的输出,直到检测到街道上的运动为止。一个当检测到运动时,将初始化计时器。然后单片机继续读取声纳传感器的距离值,直到计时器完成计数15分钟。与此同时,只要距离值由于车辆的原因而从默认值减少通过传感器,微控制器等待100毫秒的值再次增加。然后考虑一辆车或一个人
当距离值再次增加到默认值并将“车辆定位器”变量的值设置为1时,将进行计算。因此微控制器在15分钟内对通过极点的车辆数进行计数,并确定车辆的占空比根据表I控制led亮度的PWM信号。
表一 不同车流量的PWM工作周期百分比
在实践中,PWM信号控制一个MOSFET的基电流,它控制电流通led灯。LED灯的能源消耗取决于PWM (b).频宽比根据公式。
LED灯功耗=最大功耗*占空比(%)hellip;hellip;hellip;(b)
从表一可以看出,PWM信号的占空比默认设置为90%。然后随着车辆数量的减少。
C.无线监控系统
无线监控系统采用NRF和GSM技术来手动控制和监控太阳能电池板运动或灯光强度从遥远的地方无线传输。系统数据流程如图5所示。
图五 无限检测及控制系统中的数据流
nRF收发器允许一个路灯单元在一个覆盖区域内同时与6个其他单元通信约100米在2.4 GHz的高速射频高达2mbps baud率[32]。因此一个协调单元可以发送或从网络覆盖区域内所有其他路灯单元接收数据,微控制器共享信息与服务器通过GPRS数据通信系统的GSM模块[33]实现,如图5所示。在线服务器可以通过互联网访问。因此,监测和控制一个地区的所有路灯成为可能的使用
电脑或智能手机。
d试验装置
实验装置是
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[236802],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 拟人手臂的轨迹规划与轨迹跟踪控制外文翻译资料
- 新型磁性辅助内窥镜系统在上消化道检查中应用的可行性 和安全性外文翻译资料
- 基于FPGA可编程逻辑器件的复合视频图像处理外文翻译资料
- 从被测的高频域原始信号中提取巴克豪森噪声外文翻译资料
- 重型机床z轴热误差混合建模方法外文翻译资料
- 一个红外浊度传感器:设计与应用外文翻译资料
- 用于控制食物烹饪过程的电子系统.外文翻译资料
- 关于液体介质中电磁流量计的设计和理论上存在的问题。第二部分:关于带电粒子产生的 噪声理论外文翻译资料
- 基于LabVIEW和Matlab的小波变换对非平稳信号的分析仿真外文翻译资料
- 应用于腹腔镜手术的新型膜式加热加湿器 的开发外文翻译资料

