英语原文共 17 页,剩余内容已隐藏,支付完成后下载完整资料
使用新的车道模型和距离变换进行车道线检测和跟踪
Jiang Ruyi·Klette Reinhard·Vaudrey Tobi·Wang Shigang
摘要:车道线检测是驾驶员辅助系统的重要组成部分。自1990年代中期以来,基于道路的车道偏离警告的解决方案开始投放市场。然而直到最近,改善和推广基于视觉的车道线检测仍然是一项艰巨的任务。在开发的各种车道线检测方法中,基于车道形状的全局假设的强车道模型在检测结果中显示出鲁棒性,但缺乏对各种形状车道的灵活性。相反,弱车道模型将适应于不同的车道形状,并保持稳定性。使用非典型的弱车道模型,车道边界点的粒子过滤已被证明是定位车道的可靠方法。在当前研究中,边界点的位置直接使用跟踪状态。本文采用这种基于粒子过滤器的方法介绍了一种新的弱车道模型。这个新模型参数化了左右车道边界点之间的关系,可用于检测所有类型的车道。此外,对欧几里得变换和距离变换的改进版本可以应用到边距图上,以提供边界点检测信息。与边距图相比,此距离变换的属性支持改进的车道线检测,包括一种新颖的初始化和跟踪方法。本文充分地说明了这种距离变换的应用,极大地促进了车道线检测和跟踪。还分别讨论了两种车道线跟踪方法,同时着重于效率和鲁棒性。最后,本文论述了关于车道线检测和跟踪的实验以及与其他方法的比较的报告。
关键词:车道线检测;驾驶员辅助;粒子过滤器;欧式距离变换
1引言
车道线检测在驾驶员辅助系统中起着重要作用。通常,车道线检测用于在给定道路图像中定位车道边界,并且可以帮助估计前方道路的几何形状以及车辆自身在道路上的横向位置。车道线检测用于智能巡航控制系统,车道偏离警告,道路建模等。
车道线检测和跟踪已被广泛研究和用于在高速公路[7,17]或城市道路[22]上驾驶,用于单个[7,25]或多个[2,18]车道,具有[4]或不具有[26] ]标记,基于区域(纹理[31]或颜色[9])或边缘[21]特征。已应用各种形状模型来描述车道的边界,例如分段线性线段[21],回旋曲线[7,17],抛物线[12],双曲线[27,16],样条线[25,26]或蛇型线[26,30]。几种在文献中被命名的车道线检测器已被应用,例如GOLD [4],SCARF [9],RALPH [23],MANIAC [11]和LANA [15,16]。有关车道的更完整和详细的模型和车道线检测方法,请参考[7,4,19,14],尤其是[19]中的工作,该工作提供了最新表格,其中列出了驾驶条件,车道线检测器型号和难度。通常,在各种情况下可靠地检测车道是一项艰巨的任务。例如,造成这种困难的原因如下:
——由各种照明条件和车道标识质量差引起的困难;
——违反一些常用的假设,例如恒定的道路宽度,左右车道线边界的平行度,或使用其他简化的几何道路模型(例如,抛物线边界);
——周围物体(如路边的树木,行人或道路上其他车辆造成的遮挡)造成的困难;
——在现实世界中缺少有关实际车道或道路的信息(例如没有车道标志或未铺砌的道路)。
由于上述原因,Sehestedt [22]指出,弱模型(即不假设车道的整体形状)比强模型更可取,后者使用多个参数来模拟车道的整体几何形状。本文介绍了一种用于车道线检测和跟踪的新的弱车道模型。该新模型没有限制全局道路几何形状,而是仅限制左右车道线边界上的点之间的关系。粒子过滤器根据鸟瞰图像中的这些点进行跟踪,可提供车道线检测结果。此外,将标准欧几里得距离变换(EDT)的修改版本应用于鸟瞰图图像的边缘图,该图与输入图像成反透视图。利用这种距离变换的有益特性进行车道线检测,本文指定了一种创新的初始化方法。此外,与常用的边缘图相比,距离变换还提供了更多信息(例如车道的中心线)。
2新的车道模型
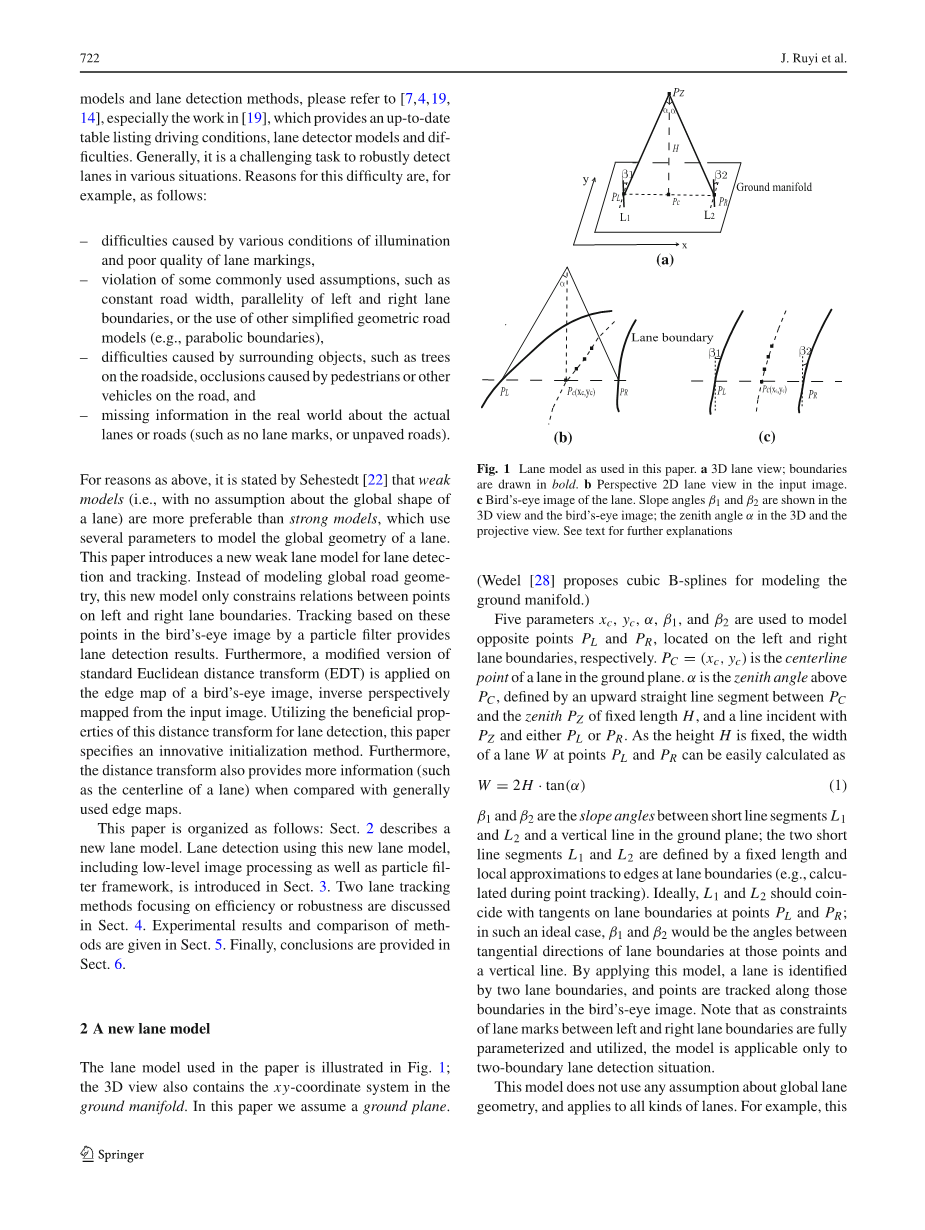
本文使用的车道模型如图1所示。 3D视图还包含地面投影中的xy坐标系。在本文中,我们假设一个接地平面。(Wedel [28]提出了三次B样条曲线,用于对地面投影进行建模。)
五个参数xc,yc,alpha;,beta;1和beta;2分别用于建模位于左右车道边界上的相对点PL和PR。PC=(xC,yC)是地平面中车道的中心线点.alpha;是PC上方的顶角,由PC与固定长度H的上顶点PZ之间的向上直线段以及与PZ和PL or PR入射的线定义。由于高度H是固定的,因此点PL和PR处的车道W的宽度可以很容易地计算为
W = 2H·tan(alpha;) (1)
beta;1和beta;2是短线段L1和L2与地平面中的垂直线之间的倾斜角;两个短线段L1和L2由固定长度和到边界的局部近似值定义(例如,在点跟踪期间计算)。理想情况下,L1和L2应该与PL和PR点上车道边界上的切线重合。在这种理想情况下,beta;1和beta;2将是这些点处车道边界的切线方向与垂直线之间的角度。通过应用此模型,可以通过两个车道边界来识别车道,并沿着鸟瞰图像中的边界跟踪点。注意,由于左右边界边界之间的边界标记的约束已被充分地参数化和利用,因此该模型仅适用于两边界车道线检测情况。
该模型不使用任何关于全局车道几何形状的假设,并且适用于各种车道。例如这个还可以使我们在单个图像中也可以检测到宽度变化的车道。由于beta;1和beta;2是分别计算的,所以一条车道也可能具有不平行的左右边界。使用此模型的车道线检测和跟踪方法将在第3和4部分中进行讨论。
3使用粒子过滤器进行车道线检测
对于在单个图像中使用弱模型进行车道线检测,粒子滤波是跟踪车道边界上的点的一种很好的解决方案,并且已经由Sehestedt[22]进行了测试。由于简单地将边界点的坐标用作要由Sehestedt [22]跟踪的状态向量,它将导致可数的状态空间,并且不会对边界点之间的内部关系建模。下面我们显示了车道模型为粒子过滤器提供了更理想的跟踪状态,并显式地建模了左右车道边界点的内部关系。此外,基于对鸟瞰边缘图应用的距离变换,采用了一种新颖的初始化方法。车道线检测的整个过程在图2中举例说明。
该算法首先使用由鸟瞰图中矩形的四个顶点定义的单一对应性将透视图输入图像映射到鸟瞰图。 [4]中介绍的一种用于检测车道线边缘的检测
方法,随后被用于检测鸟瞰图像中类似车道线标记的边缘。在对生成的边缘图进行二值化并对孤立的边缘点或小斑点进行去噪之后,应用行方向距离变换(RODT);有关此转换的规范见3.1.3节。由此产生的距离图使我们能够设计一种新颖的初始化方法来查找初始边界点。这些点用于初始化粒子滤波器的参数,以跟踪整个图像中的其他边界点。同样,RODT地图基于其有利的特性,非常方便车道线检测和跟踪。在使用滑动均值对边界进行平滑处理并映射回输入图像之后,最终会检测到一条车道。
3.1初级图像处理
图像预处理包括三个步骤:鸟瞰图绘制,边缘检测和去除噪声以及距离变换。
3.1.1鸟瞰图
如[14]中所述,四点对应关系用于从输入图像到鸟瞰图像的映射。通过在校准相机时选择四个点并使用局部平面的流形假设来实现映射。鸟瞰图的一个好处是,可以通过选择四个对应点的不同集合(即通过缩放矩形的“长度”)来调整使用的距离比例。事实证明,这对于检测不连续的车道标记以及进一步的前瞻性情况很有用。此外,鸟瞰图像中的车道标记具有恒定的宽度,可用于边缘检测。示例参见图3。
3.1.2边缘检测和噪声消除
我们回想起[4]中介绍的边缘检测方法。通过特殊设计的简单算法,可以在鸟瞰图像中检测出具有黑白相间花纹的垂直边缘。鸟瞰图像中具有值b(x,y)的每个像素与距离mge;1的水平左右相邻的值b(x-m,y)和b(x m,y)进行比较如下:
B m(x,y)=b(x,y)-b(x m,y)
B-m(x,y)=b(x,y)-b(x-m,y)(2)
最后,使用阈值T,边缘图的值将为
(3)
该边缘检测方法具有以下特性。首先,可以调整m以适合各种车道标记宽度。其次,带有最终标记的像素都标记为边缘像素,这与基于梯度的边缘算子(例如Canny,Sobel)不同。这极大地提高了标记检测点的鲁棒性。第三,路面上的阴影不会影响车道标记的边缘检测。在存在阴影的情况下,车道标记的亮度可能会受到影响,但通常仍会与其水平范围保持优势关系。因此,可以在不同的照明条件下使用边缘检测方法。最后,没有检测到水平边缘(不可能的痕迹)。有关边缘检测的示例,请参见图4。在我们的实验中,我们设m = 5,T = 30。
如上介绍的边缘检测可能会在真实车道标记的边缘之外生成一些孤立
的小斑点(包括单点)。这些嘈杂的斑点将极大地影响随后的距离变换的结果(参见图6,距离变换将在第3.1.3节中讨论)。为了消除这种噪声,将应用指定的操作。通常的想法是首先找到孤立的斑点,然后将它们设置为零(非边缘)。使用两个具有相同中心的小方形窗口(内部和外部)(见图5)。并且,外窗的宽度比内窗大1个像素。可以通过在整个边缘图中同时移动这两个窗口并比较其中的边缘值之和来检测孤立的斑点。两个相等的和意味着两个窗口之间的间隙不包含边缘点,并且内部窗口中的边缘斑点被检测为孤立的并且设置为零。在我们的实验中,考虑到可能的车道标记斑点的最小大小,我们将外部窗口的宽度设置为10像素。在计算效率方面,边缘图的积分图像用于计算小窗口内的总和。
3.1.3距离变换
应用于二进制边缘图的距离变换I用与最近边缘像素的距离标记每个像素。对于I的所有像素p,距离变换
确定:
(4)
其中d(p,qu)表示度量,并且u列出图像I中的所有U像素。dt(p)的值取决于所选度量。边缘显然用值0标记,并在生成的距离图中显示为黑色。
在各种距离变换中,欧氏距离变换(EDT)是常见的选择。原始EDT使用欧几里德度量标准来测量像素之间的距离。我们用公式4中的d(p,qu)代替欧几里得度量de(p,qu)的如下:
(5)
对于点p =(x1,y1)和q =(x2,y2)。有关距离变换和EDT的更多详细信息,请参阅[24]。 Felzenszwalb [8]证明可以通过两个1D EDT来计算2D EDT,这大大提高了计算效率。文献[29]中提出了一种改进的EDT,称为定向距离变换(ODT)。这将欧几里得距离在行和列方向上分为两个部分。(请注意,使用四或八距离的变换不会导致相同的行和列分量;但是,相对于给定的上下文,实际上应该没有太大的区别。)ODT的行部分,命名为本文中的RODT使用到行方向上最近的边缘点的距离值标记每个像素。此外,RODT带有符号,正值表示最近的边缘点位于右侧,而负值则位于左侧。边缘贴图的RODT具
有多种优势。通常,作为距离变换,RODT映射中的每个像素都指示其最近的边缘点在哪里。因此,与边缘图相比,距离变换提供了更多有关车道线的信息(例如,中心线或道路边界的信息,将在第3节中指出)。例如,车道中心线上的(非边缘)像素在到车道边界的距离上将具有局部最大值。该信息对于找到或走向边缘点非常有用,并将在以下各节中介绍的车道线检测和跟踪方法中得到充分利用。
此外,与EDT相比,RODT在车道线检测方面具有一些优势。首先,车道线检测的初始化变得更加容易(将在3.2节中进行讨论)。其次,不连续的车道标记与RODT中的连续车道标记几乎没有区别,而在EDT中则不然,如图7所示。这还为算法提供了提前找到接近车道线的能力。
在车道线检测情况下,距离变换对某些孤立的点或斑点很敏感。如图6所示,车道中央的n个边缘点将极大地改变周围像素的距离值。因此,在3.1.2节中介绍的对边缘图进行去噪的方法是必要的,并被证明是有用的。
3.2车道线检测初始化
初始化的目的是找到指定模型的初始值(例如,选定图像行中的点PL和PR的x坐标)。在[22]中,使用聚类的粒子过滤器在车道边界上找到起点。与此不同的是,我们充分利用了距离图来找到第一个左右边界点。在鸟瞰图像的预定义起始行yC0(靠近底部)中,从该行的中间开始搜索一个像素,该像素在其左相邻像素中具有正距离值,而在其负相邻像素中具有负距离值(参见图8)。当找到这样的像素时,立即使用找到的像素及其左区域的距离值知道开始行中的左右边界点。如果车道中间存在一些嘈杂的边缘点,从而影响了搜索初始边界点的距离值,则可以使用一些有用的假设来完成此过程。这些假设之一可以是车
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[236118],资料为PDF文档或Word文档,PDF文档可免费转换为Word

