
英语原文共 17 页
双目立体视觉系统定位精度分析
摘要:双目立体视觉(BSV)系统已广泛应用于智能制造,智能机器人等各个领域。然而,由于BSV系统缺乏参数优化,当前BSV的定位精度仍不能完全满足行业要求。本文提出了一种高精度的BSV系统。这是通过分析BSV系统的七个参数来实现的,这些参数分为两组:系统结构参数(SSP)和摄像机校准参数(CCP)。对于SSP,设计了一种改进的分析模型,以揭示由三个参数引起的可能的错误。此外,还提出了一种新的相关模型来分析由它们的相关性引起的误差。另一方面,对于CCP,采用正交实验模型来选择四个校准参数的最佳组合。同时,还分析了四个参数中的权重以减少误差。最后,通过大量实验证明了我们提出的方法的有效性。它为应用光学研究和应用领域中使用的BSV系统提供了有用的参考。
关键词:双目立体视觉系统;定位精度;摄像机校准参数;系统结构参数;应用光学
1引言
近年来,随着工业智能的发展,双目立体视觉(BSV)系统在各种应用领域变得越来越重要。 但是,现有BSV系统的定位精度不能完全满足行业要求。 这是因为大多数现有的BSV系统都是根据工程师的经验构建的,这导致定位精度低。 因此,越来越多的研究人员致力于设计最佳的BSV系统,其高精度可以满足苛刻的要求。 为了获得具有最佳精度的BSV系统,需要分析以下两种关系:每个参数与可能的错误之间的关系;所有参数之间的关系。
为了完善自己的关系,有必要进行分析框架工作。 虽然用于分析BSV系统精度的现有方法仅关注一些固定参数。虽然用于分析BSV系统精度的现有方法仅关注一些固定参数。更进一步,没有设计分析方法来暴露上述多参数复杂关系。Cui等人提出了一种新的束调整算法,以提高BSV系统的准确性。但是,此方法只能用于固定的相对约束。垂直补偿方法是另一种提高BSV系统精度的新方法,此方法只能用于某些特殊系统,它不能扩展到大多数通用系统。总而言之,他们最严峻的问题是可扩展性。
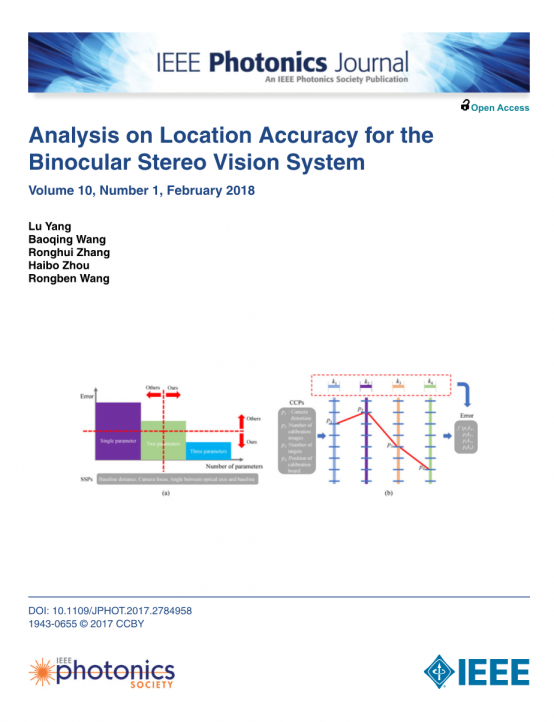
在本文中,提出了一个可扩展的分析框架来指导用户的最佳参数选择。在此框架下,通过分析所有可能的因素,提高了BSV系统的准确性。这些因素分为两组:系统结构参数(SSP)和摄像机校准参数(CCPs),如图1所示,BSV系统的误差主要来自这两组中的参数。在系统结构组[见图1(a)]中,分析模型设计用于以下三个参数:基线距离,相机焦点以及光轴和基线之间的角度,它们引起的可能错误将分别详细分析。同时,还分析了它们之间的相关性,以确定它们可能产生的累积误差,这是我们的主要贡献之一。我们的方法是分析所有3个参数,单参数和2参数的方法误差也小于现有方法。另一方面,正交实验模型用于选择4个校准参数的最佳组合。这是我们工作的另一项重要贡献。如图1(b)所示,根据以下4个参数的性质,进行了大量实验:校准失真,校准图像数量,数量目标和校准板位置。通过使用这四个参数及其权重的组合进行分析。我们提出的方法,如图1(b)所示。
图1
本文的其余部分安排如下:第2节提供了BSV系统精度分析领域相关工作的调查。第3节解释了BSV系统作为我们提出的方法的背景知识。第4节描述了系统结构参数(SSP)的几种建议分析模型,随后是第5节中相机校准参数(CCP)的实验分析方案。还进行了实验结果以证明所提出分析的有效性。框架。第6节总结了本文,并提到了未来可能的扩展。
2.相关工作
BSV系统的定位分析在BSV领域进行了研究。由于BSV系统的输出,它已经广泛应用于社会生产。为了满足BSV系统不同精度要求的需求,大量研究人员将BSV系统扩展到了提高系统精度的分析方法。此外,他们还使用分析工具来分析提高系统精度的方法,表达研究结果的最佳参数。
系统精度领域的大量研究并不全面。他们分析了BSV系统CCP的影响。其中,为提高空间定位精度,许多研究人员对摄像机校准算法进行了优化。小矩阵源自Cui等人的方法,提高了相机校准的计算效率。为了提高校准精度,Jia等人在相机校准中增加了垂直度补偿。 Fathi等人开发了一种新的校准方法,以提高校准精度,他们通过3D点云实验证明了该方法是正确的。在某种程度上,他们的深入研究提高了系统的定位精度,但它没有考虑其他重要因素对BSV系统的影响,因此,他们的研究缺乏全面的分析。 Liu、Lu和Shih等人对SSP进行了大量研究。Liu等人对BSV的SSP进行了详细的分析,其中包括焦点,基线,光谱与基线之间的角度。Lu等人基于他们的研究分析了CCD像素不连续性对BSV系统的影响。对于全景相机的3D测量,Shih等人分析了SSP,并优化了结构算法。但他们只分析了SSP,也没有考虑CCP对BSV系统的影响。目前,大多数研究人员在BSV系统的研究中没有考虑读者的信息访问,因此没有太多的参考选择。这些实验方法简单,分析不够彻底。Liu等人分析了很多SSP的趋势。但它们只给出了一些光学参数的变化曲线,缺乏综合分析。Chen和Liu等人。不仅对两台摄像机的光学参数进行了全面分析,而且还给出了参数变化曲面和直观简洁的分析。但是,他们的分析并不清楚,缺乏实验模块。Liu等人还详细讨论了BSV系统的准确性。他们的研究进行了理论分析,并用图表显示了实验结果。但是,所考虑的因素缺乏全面性,实验方法是单一的。在本文中,影响BSV系统定位精度的因素包括SSP和CCP。结合CCPs和SSPs,本文进行了全面的科学研究,并进行了仿真分析和大量实验,以获得最佳的最优参数。
3. BSV系统模型
BSV是工业智能领域的重要组成部分。视差理论是BSV测量的基本原理。 首先,双目相机从不同位置获得测量点的两个图像,然后计算图像的对应点之间的位置偏差。 最后,获得对象3D信息。 这是BSV成像测量的过程。
3.1摄像机校准模型
相机立体校准的目标是同步空间坐标系和像素坐标系之间的点映射关系。 假设其中,空间坐标系(,,),坐标系统为(,,),图像坐标系为(X,Y),像素坐标系为(u,v),如图2所示。
图2 坐标系
图3 BSV系统精度分析原理图
它们的映射关系可以表示如下:
矩阵A是齐次矩阵,表示相似的内部参数,tau;是偏斜因子,在本文中,我们设置tau;=0。是摄像机外部参数,其中R,t,s分别代表旋转矩阵,平移矩阵和比例因子。 外部参数可用于获得两个或更多个摄像机之间的位置关系。
3.2点位置模型
为了实现点的定位过程,设计了BSV结构模型,如公式1所示。 BSV结构模型的参数如图3所示。光轴与基线之间的角度为和,水平投影角为和,摄像头为和,垂直投影角为和,基线距离为B,对象电阻为M。 这些参数不具有独立性。复杂的关系导致难以提高该点的定位精度。 在图3中,将
左摄像机坐标系选为空间坐标系。 水平投影角度与摄像机垂直投影角度之间的几何关系如下所示:
图4简化BSV系统模型
令 ,。如图4所示,空间坐标系中点P的三维坐标可以如下获得:
4.对SSP的分析
BSV系统的SSPs包括基线距离B,视频角度和基线alpha;之间的角度,相机焦点f.P(,,)可表示为F(B,,,,,,,,,,)。 这里,omega;是水平投影角,(X,Y)是图像坐标。
根据误差的物理合成和分布,系统位置的表示由,和轴上的误差表示。 然后,可以获得总误差,如公式4所示。 为了简化研究过程,不考虑误差系数。系统错误传递函数如公式5所示。
其中,gamma;是总误差,是由参数引起的误差,是包括B,,,,,,,,,的参数之一 ,j表示,或的方向,delta;i是误差系数。
4.1基线距离
对于双目立体视觉系统的结构和位置精度,B的重要变化将是对双向远程系统结构和位置精度的重要转换。 在本节中,基线距离B和误差之间的关系将分两步进行分析:获得关系公式并对其进行分析。
图5 参数k与系统误差的关系曲线
首先,获得关系公式。 假设点P位于两个摄像机轴的交点处。 设,0°, 0°, 0。 使用公式3空间坐标(,,)可以获得公式6和7。 注意,。 这意味着基线距离B仅在水平面(和方向)上产生误差。
令kB/M,,,,,P在方向上和方向上的测量误差是:
因此,可以由公式5,8,9获得由基线距离B引起的总测量误差:
其次,分析得到的上述关系式。 从上面的分析,k可以用来代替B,来分析误差和基线距离之间的关系。这是因为k = B / M,并且M是固定参数。但是,由公式10中复杂的三角函数式很难解释这种关系。因此,我们使用泰勒公式用k代替alpha;,例如,。联系公式8,9,10,误差和基线距离之间的最终关系可以如图5所示。
在图5中,组合了P的三个方向误差,包括X轴,Y轴(等于0)和Z轴。曲线的趋势首先下降然后上升。 当k = 1.41时,可以获得最小合成误差()。 由于k = B / M,我们可以得出以下结论:当Mle;Ble;2M时,可以获得最小的位置误差。 当0.5M lt;B lt;0.7M时,位置误差太大而无法接受。 请注意,K的数据应根据具体条件进行调整,并使其接近1.41。
4.2相机焦距
相机的焦距大约等于相机镜头中心和CCD成像传感器之间的距离。 在本节中,将分析焦距与BSV系统误差之间的关系。图6示出了当BSV系统中其他参数恒定时,随着相机焦距的增加,FOV变窄。 在收集图像时,物体应放置在两个不同焦距的公共区域。
图6 BSV系统焦距的变化
根据公式3和5,可以得到BSV系统中两个摄像机焦点和的误差传递函数。
使用公式11和12可以得到系统误差分布曲线的不同焦距。 如图7所示,随着相机焦距的增加和FOV的减小,系统误差正在减小。
图7 焦距对系统误差的影响
4.3光轴和基线之间的角度
光轴和基线之间的角度alpha;也是影响定位精度的关键因素。根据公式3和5,关于和的误差传递函数可以得到如下公式:
使用公式13和14,可以得到和的误差曲线,如图8所示。
图8 光轴和基线之间的角度对系统误差的影响
4.4综合分析
上面分别分析了三个结构参数(B,f,alpha;)。然而,单个变量范围不能分析三个参数之间的复杂关系。本节对三个参数的组合进行了分析。 这是我们的主要贡献之一。 使用公式10,11和13,综合传递函数可以得到:
图9是使用公式15综合分析的结果。分析了5种不同的基线距离,由图9中不同颜色的不同表面表示。每个表面显示焦点f,角度alpha;和系统误差之间的关系。从内表面(紫色)到外表面(黄色),B的值增加。可以看出,随着B的增加,表面向下移动并扩展。系统错误减少了。随着焦点的增加,表面下降。系统错误逐渐减少。从右侧看,角度alpha;呈U形变化,细节如图9(b)所示。可以获得具有最小误差的临界点。使用上述综合分析,可以获得高精度的位置。
图9 综合分析三个参数
5.对CCP的分析
准参数(CCP)会影响BSV系统的定位精度。在本节中,我们将分析4个CCP的影响,包括相机失真(参见第5.1节),校准图像的数量(见第5.2节),数量目标(见第5.3节)和校准板的位置(见第5.4节)。受控变量方法将用于分析来自四个CCP之一的错误。 此外,采用正交试验方法分析4个CCP组合引起的误差(见5.5节)。
使用IMAVISION的两台Manta G-201C相机进行定位实验。校准距离约为2.5 m,倾斜板与摄像机平面之间的角度应小于45°,棋盘放置在校准板的表面上。每个棋盘的实际尺寸为30times;30mm,使用的图像数为13。光源为自然光。在校准过程中,根据第4节的分析,将SSP设置为最佳值。将使用等式5分析精度。gamma;表示定位坐标和实际坐标之间的差异。
5.1相机失真
在实际应用中,镜片制造过程并不完美,镜片在组装过程中存在误差。 镜头错误会导致少量的图像失真。
线性相机模型是一种理想的相机模型,其中由相同的制造和组装引起的失真。线性模型广泛使用的方法,因为它非常简单。 但是,线性模型会导致较大的误差。 在我们提出的方法中,非线性模型将用于分析和纠正由失真引起的误差。
通常认为非线性失真是几何失真。 它在捕获图像的点与其理想点的位置之间产生偏移。 校正失真是为了尽可能地消除偏移。 图10是透镜畸变的示意图。
图10 非线性模型示意图
表1
内部参数
在公式16中,(,)是图像坐标系中的实际投影P的坐标。 (x,y)是投影点的坐标。 未和是沿X和Y方向的失真产生的偏移。 失真包括径向失真和切向失真。 径向畸变主要是由光学透镜的径向弯曲引起的[23]。 这种变形导致图像点沿径向向内或向外移动。离中心越远,变形越大。和未分别是沿X和Y方向的径向畸变偏差。 切向变形是由镜片制造商的缺陷引起的。 它使镜头本身不与图像平面平行。 未和未分别是沿X和Y方向的切向畸变偏差。
其中,,,是径向失真因子,,是正常的失真因子。方程中的自由基畸变和切向畸变。图17可以合成为最终失真,如公式18所示。
最后,通过比较误差和线性方法,证明了我们的非线性方法的有效性。表1-3中的校准参数用于定位实验球的空间位置(3D重建)。这里,表1和表2中的参数是线性和非线性模型的公共参数,而表3是非线性模型的参数。表4是线性模型和非线性模型的结果。由于非线性模型的失真校正过程,使用非线性方法的误差小于线性方法。
表2
摄像机失真参数
表3
外部参数
表4
相

