
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
用于测量距离和检测障碍物的超声传感器的设计
摘要:本文介绍了一种设计高定向超声波范围传感器的用于检测移动机器人应用中的障碍物的传感器新颖方法。传感器由波浪发生器,放大和辐射部分,以及反作用力组成。本设计的工作原理以在使用两个超声波之间的频率差的参数阵列方法为基础,这种方法产生具有小孔径的高度定向的低频波。这项研究的目的是为了设计一个最佳的传感器,以有效地产生两个同时的纵向模式。 我们首先通过组合一个酒吧的连续模型和反向推算得到适当的数学模型,此模型具有压电致动器和线性喇叭之间的兼容性条件。然后我们使用有限元方法确定铝喇叭和压电致动器的最佳长度。所提出的传感器的半功率带宽小于plusmn;1.3°,功率为44.8kHz,方向性比现有的传统超声波范围传感器高得多。
1.介绍
随着各种取代人类工作的机器人的发展,能够给予环境信息的传感技术也引起了广大的关注。超声波范围传感器由于价格低廉,效率高,结构相对简单,近期被用于机器人的范围检测和障碍识别。然而超声波一般比低频波具有更好的方向性,衰减更快。这意味着如果仅使用一个工作频率,则方向性和工作距离不能同时改善。因此,与空间分辨率以及工作距离有关的方向性应该是放在他们的分析中心。日本村田公司和超声波传感器的偏振片型传感器可商用于机器人,尽管大多数产品使用40 kHz的单个工作频率,功率波束宽度为20°,如图1所示。这意味着光束距离声源5米的距离约为1米宽。如果一个物体靠近梁内的另一个物体,两者都将被识别为单个对象。因此,本研究的目的是开发具有小于5°的高方向性的超声波传感器,同时保持与现有商业产品相同的工作距离。具体来说,本文着重于设计传感器的驱动和放大部分的方法。在这项研究中,我们使用了加列戈 - 雷斯的台阶板的修改版本作为发射器,而麦克风作为接收器。原来的台阶板具有用于波浪发生,放大和辐射的部件。其主要特点是可以通过在大气散射板中加入空气中的半波长的声音,从能量角度对单频率的超声波进行放大和高效生产。然而,这需要修改以产生使用参数声阵列的双频波。当具有足够高振幅的双频波(主波)传播时,由于介质在空气中的非线性效应,产生差频波(次波)[13-17]。
虽然商业开发的参数声阵系统如伍迪诺里斯公司,约瑟夫庞贝和森海塞尔已经专注于扬声器产生可听见的声音,但本研究的重点是将超声波用作介质检测对象。因此,使用的主辐射频率为80 kHz和120 kHz [18]。 需要产生具有两个频率的高放大初级波以实现设计目标,并且调整两个谐振频率需要新颖的设计方法。参数声学阵列使得可以提高超声波范围传感器的方向性,从而减少其工作距离。
图1市售的宝丽来传感器的方向图[3].传感器的HPBW接近20度。
第一步是开发和验证用于获得换能器的产生和放大部分的最佳设计的方法以有效地产生两个同时的纵向模式。我们使用数学软件商业软件包导出了近似的分析连续模型。该模型的图形输出用于分析各种设计参数的影响,并确定系统解决方案的边界。然后通过应用铝棒和压电致动器之间的兼容性条件来确定每个设计参数。Ea有限元分析提供了最终的设计解决方案。该模型通过使用基于设计的超声波传感器的原型的几个实验来验证。
2.设计流程
该研究使用了加列戈-雷斯的阶梯式传感器,因为其制造成本低,并且适用于产生用于参数阵列的强波。该板可以通过在板的节点线上放置具有半波长的空气中的声音的步骤进行相位辐射[7-12]。阶梯式换能器由三部分组成:辐射部分, 波形放大部分和波形产生部分。
生成和放大部分必须被修改以产生双频波,因为它们最初仅针对单个频率设计。 因为板设计是基于自由边界条件的假设,所以在传感器的末端附着反质量,以确保两种模式具有相同的节点。图2示出了台阶板的示意图,使用具有相反极化的预应力PZT陶瓷环作为换能器材料,来自PZT环的振动由线性喇叭放大并转移到辐射板。具有阶梯轮廓的辐射板产生高强度超声波。设计流程可概括如下。 首先,选择40 kHz的差频; 这与常规超声波传感器的工作频率相同。 选择最佳主频率为80和120 kHz以有效产生差频波。 驱动部件的直径确定为纵向模式的80 kHz波长的四分之一。然后,两个压电盘驱动器(C21;富士陶瓷公司)用于波浪生成[19]。 该传感器由于其放大率,易于制造和应力集中的稳定性而使用线性喇叭作为波形放大部件。
图2 超声波传感器示意图。 该传感器由辐射板,直角喇叭,压电环执行器和反质量体组成。
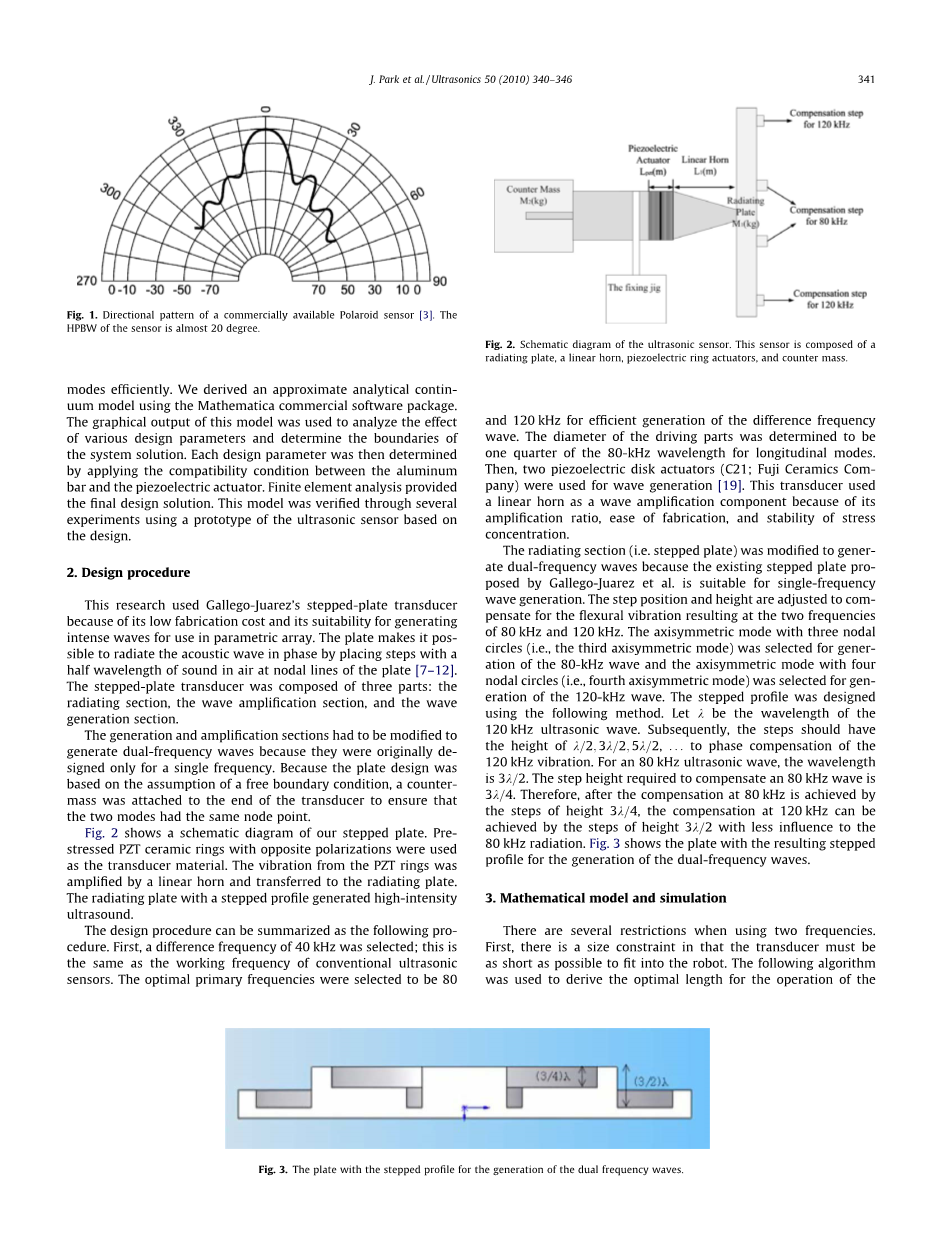
由于加列戈 - 雷斯等人提出的现有阶梯板,辐射部分(即阶梯板)被修改以产生双频波。适用于单频波发生。调整台阶位置和高度以补偿在80 kHz和120 kHz的两个频率下产生的弯曲振动。选择具有三个节点圆(即第三轴对称模式)的轴对称模式用于产生80kHz波,并且使用四个轴对称模式。选择节圆(即第四轴对称模式)以产生120kHz波。使用以下方法设计阶梯型材。令为120 kHz超声波的波长。随后,步骤应该具有; ; ,...的高度,相对于120kHz振动的相位补偿。对于80 kHz超声波,波长为,补偿80 kHz波形所需的台阶高度为。因此,在通过高度为的步骤实现80kHz的补偿之后,120kHz的补偿可以通过对80kHz辐射的影响较小的高度的步骤来实现。图3示出了具有用于产生双频波的所得阶梯轮廓的板。
图3具有阶梯轮廓的板,用于产生双频波。
3.数学模型和模拟
使用两个频率时有几个限制。首先,有一个尺寸约束,因为传感器必须尽可能短以适应机器人。 使用以下算法来推导出两种频率模式的操作的最佳长度。由于长度限制,不能使用第一纵向模式,所以必须考虑第二或第三纵向模式。 我们制定了一种简化形状的分析连续模型,对最佳长度进行粗略估计。 基于该模型,我们确定了传感器的长度和反质量
假设材料只是铝合金。 然后,通过使用与以前研究中应用的方法类似的方法,通过应用铝和压电陶瓷之间的兼容性条件得到最终模型。使用连续模型的均匀棒的控制方程为[20]
,当 (1)
因为模型的两端都具有虚拟质量和自由边界条件,所以我们可以将以下公式应用于公式(1):
时; (2)
时; (3)
最后的特征方程可以表示为
当 时; (4)
其中M是质量,c是声速,A是面积,E是模数,x是角频率。图4显示了使用数学公式产生的等式(4)的曲线图。该图显示了换能器长度与反质量之间的关系。该黑线为80kHz,红色虚线为120kHz,蓝色虚线表示与散热板相同的质量。我们设计的反散热器与辐射板相同的原因在于,由于压电致动器的致动位移向前产生,所以通过将节点线放置在压电致动器的后面可以最大化辐射效率。虚线圈表示特定材料Al 7075的换能器的最佳长度,因为它对应于两个驱动频率接近的点。当反质量与辐射板的质量大致相同时,换能器的最佳长度为
图4传感器的两个工作频率的特性曲线。 X轴是换能器长度,Y轴是相对质量。 黑线为80 kHz,为红色虚线为120kHz,蓝色虚线与辐射板质量相同。 (为了解释这个图例中的颜色参考,读者可以参考本文的网页版本。)
67mm。 当没有反作用时,最佳长度为53毫米。由于压电盘驱动器的材料特性,该长度必须重新计算。这可以使用铝合金和压电致动器之间的兼容性条件来进行。换句话说,纵向位移和力应该在边界平面上是连续的。
该方程给出相对于两种频率模式的最佳长度。 压电执行器和铝条之间的兼容性条件是[21,22]
(5)
每个组件的长度可以使用等式 (4)和(5)。表1显示了设计规范。使用分析设计参数,进行有限元分析以检查谐振频率和节点线。图5示出了82.0和120.8kHz的板的纵向模式形状和节点线。 有限元分析的结果表明,传感器体的几乎相同的节点线通过将反码器放置在换能器的末端来实现。 同样的节点线意味着当传感器被致动时,理论上能量损失最小化。 也就是说,它使传感器的声压最大化。表2比较了几个模型的结果,包括理论模型和有限元分析。 这表明理论模型对于预测有限元分析模型的结果非常有效。
表1
(a)80.0khz的模型分析 (b)120.8khz的模型分析
图 5 使用Cosmosworks商业软件对传感器进行有限元分析。 该图显示了两个模式的节点线位于压电致动器部分的正后方
实验和结果
实验目的如下:
1.比较分析和有限元分析模型与原型超声波范围传感器系统的共振频率,
2.测试传感器的方向图,以及
3.确定传感器的辐射特性。
图6显示了实验装置,包括功能发生器,功率放大器,快速傅里叶变换分析仪,调理放大器和麦克风。 实验在半消声室(2times;2times;3)进行。传感器和麦克风安装在1.2米的高度,以减少实验过程中地板反射的影响。 来自两个功能发生器的输入信号由功率放大器放大。 然后将放大的信号施加到换能器以产生主波。 由麦克风捕获由参数声阵列产生的差频波,并将来自麦克风的信号通过调理放大器并在FFT分析仪或示波器上进行可视化。测量位置通过分别安装在传感器和麦克风上的电动转盘和电动线性级调节。
图6 测量方向性和频率的实验设置响应。
图7a示出了对于工作频率为79和123kHz的几个谐振频率的频率响应。 图中的其他峰似乎是由两个工作频率之间的几种中间模式引起的。 为了确认这些方面我们测量了电导纳和振动速度响应。 图7b示出了使用阻抗分析仪测量的换能器的电导纳和用激光多普勒振动计在板中心测量的振动速度响应。 在两个工作频率下,速度响应中也有峰值,说明设计的传感器显示出适当的纵向模式。 将其他峰与传感器的FEM分析结果进行比较,我们得出结论:这些与其他中间模式有关。
- 频率响应具有工作频率的多个谐振频率
(b)板中心测量的电导纳和振动速度响应(注意:速度幅度是任意的)
图7 换能器的频率响应和电导纳
图8示出了具有相对质量的超声波传感器(具有白色圆点的黑色实线)并且没有反质量(灰色实线)的方向图。通过将麦克风从0°移动进行测量到60°关系到声轴通过转盘。在换能器的远场区域中测量主波和差频波的方向图,距换能器1米的距离。平均瑞利距离(,其中k是传感器的平均主波数),。通过功率放大器将每个主频(79 kHz和124 kHz)的90Vpk的谐波输入信号施加到换能器。由于具有计数器质量的传感器设计用于双频发生,因此具有比没有反向质量的传感器在120 kHz时更高的方向性。因此,主波的高方向特性导致HPBW约为plusmn;1.3Omega;的高方向差频波;使用参数声阵列。这意味着由反质量控制的驱动频率中的相同节点线改善了方向性,降低了差频波的旁瓣。
- 主波方向图(82khz)
(b)主波方向图(120khz)
(c)主波方向图(40khz)
图8具有反质量的超声波传感器的方向图(黑色实线,白色圆点),无反质量(灰色实线)。
图9示出了主波和差频波的测量和计算的传播曲线。观察到主波的声压级大于120 dB,差频波的声压级为83 dB。通过数值KZK模拟得到差频波的计算传播曲线[24]。该计算中的主波的源极水平被确定为具有与传感器的远场区域中测量的压力振幅相同的压力幅度。测量和计算数据之间的一致性表明存在来自传感器和麦克风的非线性的可忽略杂散信号的参数阵列[25]。
图9 主波和差频波的测量和计算传播曲线。
理论上,有限元分析和实验结果列于表2.这些验证了我们模型的效率和准确性。
5.讨论和结论
本研究的结论和讨论可概括如下。
1.我们设计,制造和测试了一种新型高定向超声波范围传感器。高度定向的超声波束,HPBW为plusmn;1.3°是使用这个传感器的参数声阵列产生的。主波声压级超过120dB,差频声压级为83dB。这比其他传统的超声波范围传感器好得多。结合连续模型和兼容性条件的模型适用于基于由两个高频分量之间的非线性效应产生的差频波的设计超声波范围传感器。
2.该模型可应用于由喇叭和压电盘驱动器组成的各种类型的朗文传感器。分析模型提供了最佳长度的近似解,并通过反复试验减少了有限元模型的计算时间。我们确认模型的谐振频率与原型传感器的谐振频率相似。尽管有相似之处,但在理论结果,有限元和实验结果之间存在不到4%的差异。可能的是,这些起源来自压电致动器的预载和组装状态。虽然预压力可以使压电致动器的位移最大化,但它倾向于稍微改变换能器的谐振频率。
3.通过在传感器的末端添加反质量,节点线可以放置在压电致动器的正后方。 该节点线通过产生向前的位移来改善传感器的方向性,如图8所示。
4.我们的传感器和Gal-lego的传感器之间存在显着的差异,因为辐射板被修改为通过使用补偿步长的长度根据频率来补偿两个辐射频率该修改对于参数声阵列是有效的。
总之,这种类型的传感器将有助于改善机器人中超声波范围传感器的空间分辨率。
致谢
这项工作得到韩国科学与工程基金会(KOSEF)的部分支持,通过国家科研实验室资助的科学技术部(No.R0A-2007-000-20042-0),部分由授权支持到了国防采购计划署资助
全文共6082字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[144453],资料为PDF文档或Word文档,PDF文档可免费转换为Word

