英语原文共 11 页,剩余内容已隐藏,支付完成后下载完整资料
基于无线传感网络的停车场管理系统
毕艳忠 孙利民 朱红松 颜庭莘 罗政军
1(中国科学院软件研究所,北京,100080)
2(中国科学院研究生院,北京,100039)
(邮箱: yanzhong02@ios.cn, sunlimin@ios.cn)
摘要 这篇文章介绍了一个我们团队研发的基于无线传感网络的停车场管理系统。这个系统由许多停车位监视模块,一些停车场引导模块,一个交汇模块和一个管理系统组成。所有的模块通过无线通信各自交换信息。此停车场管理系统的标准已经生效,并且初步测试结果显示该系统能够满足应用程序的要求。
关键词 无线传感网络,应用程序,停车场管理,停车场引导
1 介绍
无线传感网络通常由大量的在传感领域先进的低耗能的传感模块组成。
这些模块能感知,取样并处理从他们周围收集的信息。它们形成一种特定的网络来交换信息和逐段传递数据远程服务器。无线传感网络可以应用到许多领域,例如军事,环境监测,城市交通控制,仓库管理,智能家居等等。
这篇文章介绍了一个基于无线传感网络的停车场管理系统,相比传统的通常基于RS-485总线的停车场管理系统,在部署和维护上它都有许多优点。
而且,当今大多数停车场管理系统只能在停车场的入口和出口提供控制,但是却不能处理停车位和汽车引导的管理问题。虽然一些停车场管理系统采用非现金的支付方式来提高效率,但他们忽视了驾驶员想快速安全停车的需求。驾驶员可以不停车就进入停车场,但是可能会花更多时间在寻找理想的停车位上。然而,充分利用节点的感知能力,那么基于无线传感网络的停车场管理系统就能够监测和管理每一个停车位并提供特别的引导服务。
在我们设计的停车场管理系统中,一个传感网络被部署在停车点。共安装了三种传感节点,分别是停车位监测节点,停车引导节点和下沉节点。监测节点被安装在每个停车位上来探测它是否被占据。引导节点控制路岔道上的LED显示来帮助驾驶员找到理想的停车位。下沉节点负责收集来自整个网络的数据并把这些数据传给设置在停车场监测室的控制台。所有这些节点都通过无线频道来通信,并且自组进入一个特定的网络。根据停车场的拓扑结构和每个停车位的占位情况,控制站计算引导信息并将其传递到合适的引导节点。
文章的其余部分组织如下。在第二部分,我们介绍了停车场管理系统的系统结构。在第三部分,我们给出了在我们系统中的传感网络技术的具体的解释。第四部分描述了引导系统的机制。在第五部分,我们展示了控制站的软件框架。然后在第六部分我们给出了一些初步的测试结果并分析了系统的表现。最后,我们在第七部分总结了这篇文章。
2 系统结构
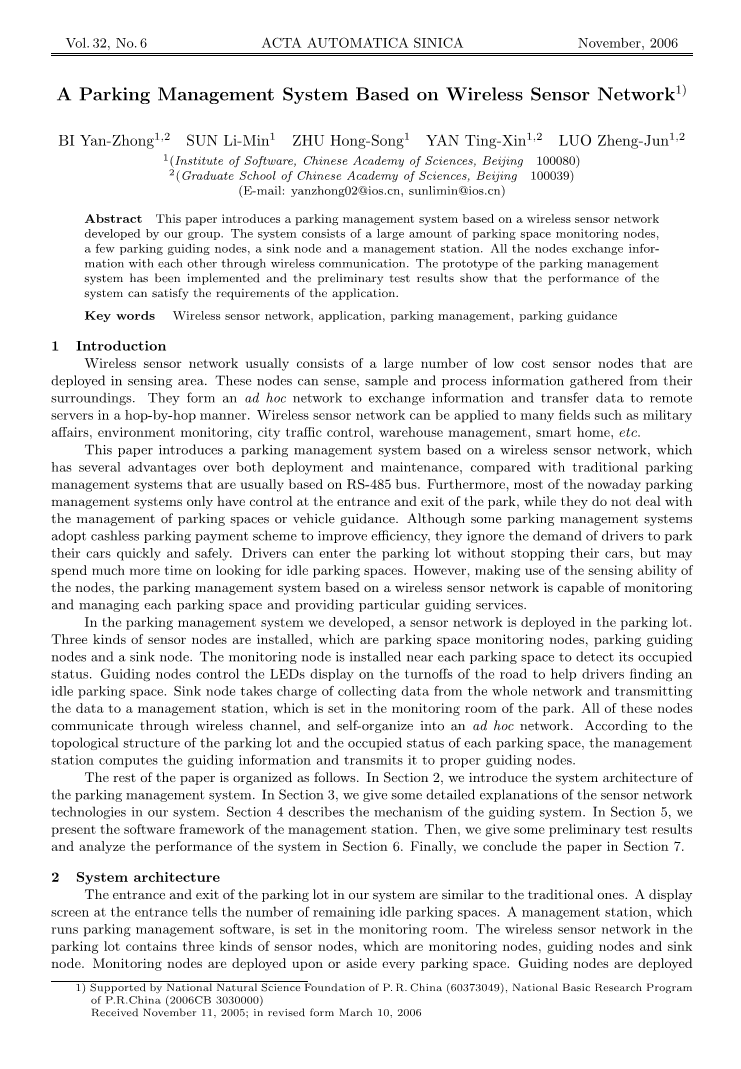
我们系统的停车场的的入口和出口与传统的相似。一个在入口的显示屏提示了剩余的理想停车位的数量。一个运行停车场管理系统软件的控制站被设置在检测室。停车场的无线传感网络包含三种传感节点,分别是监测节点,引导节点和下沉节点。监测节点被部署在每一个停车位的上面或周围。引导节点被部署在道路的主要岔路口。另外,下沉节点在监测室。该系统的无线传感网络的概况如图1所示。
图1 停车场管理系统中无线传感器网络的概述
该停车场管理系统的装置的功能如下。
1监测节点
监测节点通过超声波传感器检测停车位的状态并通过射频通信模块传输或接收消息。它也接受来自控制站的指令,来运行一些程序,如时间同步,调试,工作状态报告等等。
2引导节点
配备了一个射频通信模块和显示模块,引导节点从管理站接收指导信息并将之 显示在LED上。这样可以帮助引导汽车花更少时间找到停车位。而且,它能够传递报告信息和接收如指令,如监测节点。
. 3下沉节点
下沉节点收集停车状态报告并将它们提供给管理站。它扮演的角色如同在无线传感网络和外面网络之间的一扇门。在我们的系统中,下沉节点通过RS-232直接和管理站连接。
4管理站
管理站负责管理和维护整个系统。它处理从下沉节点接收来的数据,计算停车费用,在监测器上显示必要的信息。管理站发送停车位引导信息给引导节点并在停车场入口的显示屏上及时更新。
当系统正在运行时,所有的传感节点为了能自主收集数据,形成一个树一样的拓扑结构。监测节点检查每个停车位是否可用并将报告的信息逐段传递给下沉节点。下沉节点收集报告信息并将他们提供给管理站,然后使用者就能在监测屏幕上获得可视的状态信息。管理站为每个引导节点计算引导信息然后通过下沉节点把引导信息发送给它们。引导节点将会接收这些信息并显示引导指示。
当一辆新进来的车停在停车位上,监测节点将会在很短时间内发现这个停车位被占用了并发送一个报告信息给下沉节点。在通向下沉节点路上的其他节点将会立马转发该信息。在接收该信息之后,下沉节点将会通知管理站这个变化。因此,管理站将重新计算引导信息并将它送到合适的引导节点。
3 停车场监测节点
3.1硬件结构
图2左边显示了传感节点的硬件结构,右边显示了一个真实图片。用来监测停车位的传感节点是一个装备了微处理器的微型装置,一个无线通信模块和一个用来检测的传感器。这个微处理器是ATmega128L[1],是一个8位单片机,工作在7,3728 MHz系统时钟,有128K字节的在系统可编程闪存,一个4K字节的RAM和一个4K字节的片上EEPROM。处理器提供了三个接口,分别是SPI, ADC 和 GPIO,并用他们分别和CC1000,超声波传感器和温度传感器通信。传感节点也支持标准并行和串行通信接口,所以我们可以用并行接口来进行节点编程,用串行接口来调试。我们用的无线通信模块是CC1000[2],是一个低功率射频模块,能够提供19.2Kbps曼彻斯特编码的通信速度。传感模块包含一个超声波传感器和一个温度传感器。
图2停车监测节点的硬件结构
3.2 软件结构
在基于TinyOS[3]的传感节点上的软件,它被UCB为传感器网络开发并广泛
使用于操作系统。图3显示了全部的软件结构。这个软件系统包含了两个层,分别是应用层和系统层。应用层有一系列的模块,比如汽车探测,数据收集,路由和时间同步,来为停车位监测提供必要的服务。系统层包含了一些支持本地调制器等等。提取一些函数来形成一个系统的重点是这些模块可以很容易被移植到不同的应用程序。
图3停车监测节点的软件结构
3.2.1 汽车探测模块
汽车探测模块的功能是读取超声波传感器的探测结果,并且提供带有特定算法的停车位的占位信息。同时,这个模块包含一个需要注意的状态机并且记录了它监测的停车位的状态转换事件。
基于超声波距离测量的主要原则是记录发送一个超声波信号和接收到它的回声之间的时间间隔。由于外部温度对距离测量的精度有着巨大的影响,我们用一个额外的温度传感器来给予反馈。
当汽车检测模块发现一个状态转换事件,它会周期性地表现出一个检查算法并报告管理系统的结果。
3.2.2路由模块
路由协议为网络中的所有的节点提供一个多跳数据传递机制用来传递数据到管理系统。我们设计了一个能构建一个基于集群数据聚集树的新型路由协议来实现 这个目的。它有两个主要步骤,拓扑构建和数据传输。
图4表现了一个采用了我们的路由协议的网络的例子。拓扑构建过程始于下沉节点,是通过广播一个包含节点标识字段,跳数,下沉节点,父节点标识的拓扑构建指令来实现的。每一个节点接收到这条指令使会调整其父节点和它自己的跳数然后再转播它。所以这个指令将会到达整个网络来形成一个分层拓扑。
图4 聚合树的路由过程
在拓扑构建过程中,我们鼓励相邻节点来选择同一个节点作为它们的父节点。这个机制将会使这个拓扑不止是一个根下沉的树,也是一个基于集群的网络,这对数据聚集和其他应用也很有帮助。如图4所示,实体节点扮演了簇头的角色,
大多数节点变成了叶节点。
链路的质量将会戏剧性地随着外部环境的改变或链接失败的发生而改变。如果链接失败发生在一个父节点和它的子节点之间,这将会导致网络破裂,而网络破裂将会导致一个数据传输中的一个戏剧性的延迟。我们用一个主动检查机制来保证一个节点和它父节点之间的可靠链接质量。无论何时链接质量下降到我们能忍受的门槛以下时,子节点将会通过广播一个求助消息来重新选择父节点。然而,父节点将会在当它的剩余能量降低到低于阈值时通过广播一个通知消息迫使其子节点重新选择父节点。使用阈值的原因是保证父节点能作为一个叶节点工作足够长的时间。
在拓扑确立后,子节点将会将传感数据发送给它的父节点,父节点会逐帧转发给管理站。传感节点将会报告两种类型的数据,分别是突发数据和周期数据。突发数据是一个停车位状态变化的立即报告,而周期数据是状态的一个定期报告。因为实时处理的需要,突发数据将被立即转发到管理站,但是周期数据将会为了减少整个传感器网络的交通负担而与群集头上的其他数据进行汇总。
3.2.3数据聚合模块
数据聚合模块的目的是把几个短数据包聚合成一个长数据包,以此来减少网络的交通负担。数据聚合将会带来一些数据延迟,所以需要聚合的数据包是一些非紧急的数据包,比如定期的探测数据,远程调试数据和拓扑报告数据。数据聚合模块有一个足够大的缓冲区来应对网络中的任何类型的数据包,还有一个定时器来控制发送一个聚合包的时间。定时器的长度与进入缓冲区的第一个数据包有关,包越长,等待时间将会越短。如果缓冲器在定时器触发之前满了,聚合包会立即被发送,并且定时器将会被重置。图5给出了具体的数据聚合模块的操作过程。
图5 数据聚合的过程
3.2.4时间同步模块
时间同步模块为传感节点提供了一个标准系统时间并在所有的传感器节点之间保持同步的方式。它需要来自管理系统的标准时间并把它广播给网络上所有的节 点。因为在TinyOS中绝对时间是没有意义的,所以系统时间应该被视作一个相对时间。
下沉节点负责启动时间同步的过程。下沉节点从管理系统中获得系统时间,把它记成参考时间并将计数器的刻度设置为零。它对流过的时间计数,并且将其加入到参考时间以此来获得它的目前时间。当其广播一个时间同步包,它就会写一个时间戳到时间同步包里。当它的一个相邻节点接收到这个时间同步包,这个相邻节点就加一个经验补偿到包里的时间戳里,并以它自己的参考时间来记录结果。它使用相同的机制作为用于扩散SYNC包的下沉节点。这种机制保证传感网络中所有节点有一个唯一起始节点。
如果一些节点在以上过程中没能接受到任何SYNC包,他将广播请求帮助。任何有同步时间的相邻节点将会发送回一个包含正确时间的回复。这样会帮助节点同步到网络。
3.2.5 MAC
这种MAC机制是基于TinyOS实现的。这种MAS机制是基于竞争的并且有一个当碰撞发生时随机退出的机制。
MAC模块是MAC协议状态机的实现。MAC协议状态机是被来自SPI和ADC接口的中断驱动的。SPI中断只当MCU和CC1000模块交换了一个字节时发生,ADC中断只当通道检测时发生。如果通道是通的并且有一些东西要发送,状态机将准备发送第一个字节,否则它将为下一个通道检测等待一个随机时间。通道是否是通的的标准是由从RSSI获得的信号决定的,并且需要根据特定公式被进一步计算。
4 停车引导
4.1引导节点的硬件结构
图6表现了引导节点的硬件结构。除了添加一个LED驱动模块还要移除传感模块。它就和结构中的监测节点一样。
4.2源路由方案
引导节点通过利用一个源路由方案来从管理站获得引导信息。一个引导节点发送一个消息,被用来定期维护源路由,和监测节点一起选定给它的父节点。这个信息包括一个开始仅包含引导节点的自己的ID的源路由域。在接收该消息之后,父节点将它自己的ID加入到源路由域中,同时将信息传递给父节点。所以,维护消息将被传送到沿路由树的汇聚节点上并将记录它通过的所有节点。因此,下沉节点在当它接收维护信息时将会知道沿途的从自身到引导节点的所有节点。一旦某个节点上的源路由路径改变了它的父节点,它就发送一个更新消息到下沉节点来报告此事件,然后下沉节点将会擦去旧的路由并记录一个新的路由。
图6 引导节点的硬件结构
当下沉节点需要发送一个停车位引导信息给引导节点时,它用最新的源路由信息打包信息。这个信息将会被交付给下游的引导节点。在传输过程中,接收信息的节点将会在把信息发送给下一帧之前从信息源路由域移除它自己的ID,以此来节省通信能源。
4.3引导信息
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148717],资料为PDF文档或Word文档,PDF文档可免费转换为Word

