英语原文共 21 页,剩余内容已隐藏,支付完成后下载完整资料
专家提醒:
因为我们预计一个拾取区的黑名单在这个区域比其他区域复杂一点。下一次为了避免此区域我们将访问它以防止长周期的风险,换句话说,我们跳过了这个区域一小会,然后在更容易的区域采集。另一件事是,我们可能会在相邻区域部分bin-picking期间改变零件的位置,因为该区域之间有重叠。采集黑名单区内的一部分可能因此导致其他地区使其在稍后阶段更容易。
4.12产品类别
产品组列表描述了哪些产品必须加载bin-picking和应使用的装载产品的会话。通常只有一个产品装载在产品配置,但在工作单元和两个或两个以上的垃圾箱必须选择交叉部分(如第一个从料箱(bin)1选择,第二个从料箱(bin)2选择,第三个从料箱(bin)3选择等等)的产品列表必须指定产品使用的箱子。要打开产品组对话框,单击菜单项产品- gt;产品组。如果只有一个产品是用于bin-picking,那么所有的产品会话应该都用于识别,没有必要更改产品列表对话框中的任何设置。
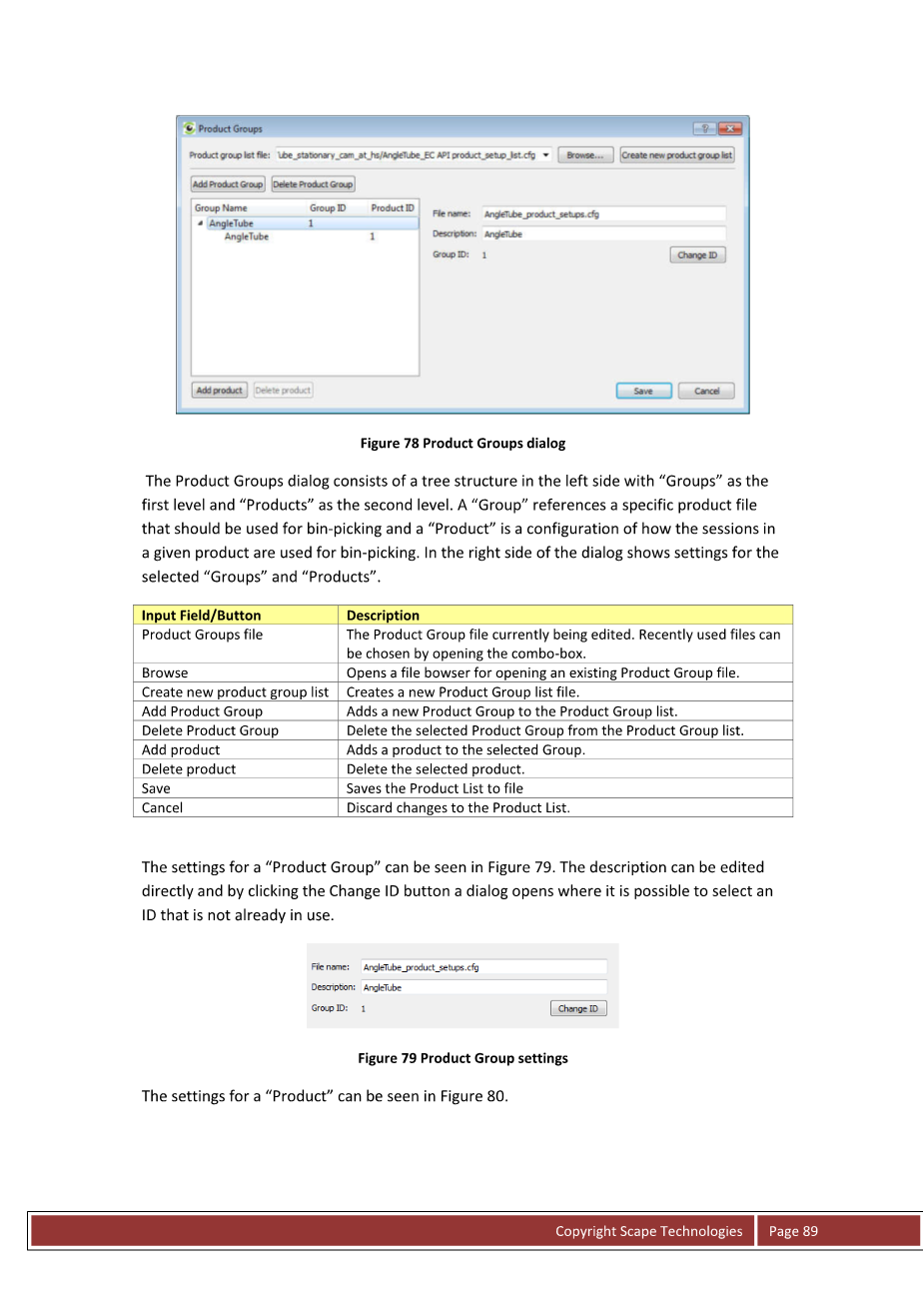
产品组对话框由一个左侧以“组”为第一级和“产品”作为第二级的树形结构组成。A“组”引用一个用于bin-picking的特定产品的文件,“产品”是一个给定产品的会话如何用于bin-picking的配置。在对话框的右侧展示出了用于选择“组”和“产品”的设置。
|
输入字段/按钮 |
描述 |
|
产品类别文件 |
产品组文件当前正在编辑。最近使用的文件可通过打开组合框来选择。 |
|
浏览 |
打开文件浏览器用于打开现有的产品组文件。 |
|
创建新产品组列表 |
创建一个新的产品组列表文件。 |
|
添加产品组 |
添加一个新产品组到产品组列表。 |
|
删除产品组 |
从产品组列表中删除所选产品组。 |
|
添加产品 |
增加一个产品给选定的组。 |
|
删除产品 |
删除所选产品。 |
|
保存 |
保存产品列表文件 |
|
取消 |
放弃更改到产品目录。 |
“产品组”的设置如图79中所示。其描述可以直接编辑,通过单击更改ID按钮打开一个对话框,可以选择编号是否已在使用中。
产品设置如图80所示。
|
输入字段/按钮 |
描述 |
|
更改ID |
这个索引是用来分辨在使用SCAPE EC API时的机器人程序中的产品。每个产品都必须有一个独特的EC设置指数。 |
|
战略 |
这个下拉框提供了两种不同bin-picking策略: 1“在至少有一个识别的对象之后停止”:如果当某部分已经被识别,那么无论多少会话一直在使用,这个战略就会停止识别过程。它是最快的策略,因为通常是一个部分仅用于第一个会话时可以被识别。 2.“合并所有会话的识别对象”:这一策略在使用产品的所有会话中运行识别,而在零部件的组合列表中进行挑选。 |
|
上移 |
将列表中一个会话向上移动一个位置,这意味着它是用于识别先前于识别过程。 |
|
下移 |
将列表中一个会话向下移动一个位置,这意味着它是用于识别滞后于识别过程。 |
|
删除 |
删除选定的会话。 |
点击“添加产品组”打开下面的对话框:
|
输入字段/按钮 |
描述 |
|
创建新产品组文件 |
如果在“产品组文件”下拉框中得不到正确的文件名,就单击此复选框以启用按钮创建一个产品组文件。 |
|
目录 |
一个显示工作产品目录的标签。不可更改。 |
|
文件名 |
该字段包含新的文件名的识别部分。 它默认包含推荐的产品名标识符。该名称不能包含空格或下划线并固定后缀“_product_setups.cfg”。 |
|
创建新文件 |
单击此按钮来创建新的产品组文件。这不会覆盖同名的现有文件。 完成此操作,现有的文件必须手动删除。 |
|
产品配置文件 |
此下拉框列出当前产品文件夹中的所有现有产品组的文件。 |
|
确定 |
点击此按钮,打开“产品组”文件。 |
|
取消 |
单击此按钮,取消打开“产品组”文件。 |
选择正确的产品组文件,然后单击“确定”按钮将其添加到产品组列表“。
点击“添加产品”按钮,打开下面的对话框:
从“产品”下拉框中选择产品,并在“名称”编辑字段中为产品编辑一个名字。注:现在的经验法则是,名称应该与产品名相同!然后点击“确定”按钮来添加产品,这将在所选择的“产品组”下的产品组列表中可见。
5教程1:非旋转对称部分和网格扫描器
在本教程中,我们将培训图83.部分。关于处理站部分的培训,读者可以参考128页第七章中教程3。
创建一个新的产品,并选择传感器类型“SCAPE工具网格扫描仪”。
5.1定义部分
打开“产品 - gt;启动零件管理”。如果要求保存更改,那就保存。
在“CAD文件名”文本框中,浏览到零件的CAD模型。这应该给一个图像,如图84所示。
因为CAD模型的中心已经在零件的中心,这里不需要做很多,所以点击“保存”,然后关闭程序。这将返回到ESCAPE部分培训工作室。
5.2建立选择区
加载CAD模型后的第一个任务是建立选择区域。打开菜单项“产品 - gt;选择区域和获取”这将打开如图85可以所示的对话框。可以看出,在从全欧洲板的情况下挑选出后,网格扫描仪的视图区(FOV)相对较小。因此,箱体需要被分成几个较小的区域。默认 2times;2个区域已创建,但由于网格扫描器无法忽视每个单独的区域,该区域需要更小。固化区域数使在料箱(bin)的x方向为3和y的方向为4,似乎使网格扫描器能够概述单独的选择区域。重叠大约为零件的大小的一半,所以这应该被设置为50毫米。边框边距保持在-20毫米确保总能采集bin的内边缘数据,即使区域中的部分是略微高于预期。
分区域保持不变。
5.3设置采集姿势
相机和对象之间的距离首先保持不变,因为这将是从不同的菜单后评估。为了获得每一单区的良好图像,所述步长大小和最大倾斜角保持为默认值10,20度,每拾取区分别给予高达25的采集姿势。
绕光轴的旋转是自动衍生是当获取图像时给出最短的机器人路径的旋转。因此,应保留默认值。
最后一个参数来验证位置约束。首先,只要工具单元在采集期间不会进入料箱,没有理由检查它实际上是否是在有无限高边的料箱内。因此,“料箱内工具单元”是不需要检查的。然而,在获取图像,降低自我碰撞和采集姿势带来的风险防止超出机器人的范围时,这是一个简单的方法来限制机器人的运动。因此,需要被检查。此外,传感器应在料箱内以看到内容。其视野范围内的采集区并不重要,因为不同的采集姿势可以纵览挑选区域,这意味着不同区域这个复选框应该置之不理。最后一个复选框可以置之不理,因为它将使当前箱子和采集姿势没有区别。
现在,这个对话框可以关闭。之前在bin获取部件的图像,该采集的距离应调整到与手部相匹配。打开菜单项“培训 - gt;范围”。这里,“传感器到零件距离”组框此时是有趣的。从网格扫描器到对象的默认距离将取决于工作单元,但应约600 MM,如图86。
由于手头上的零件具有相当大的光滑表面,在一个视图可以优先看到更多的比从彼此接近具有3D点的扫描器。因此,可提高到该对象的距离,直到范围扩大到最大校准距离,显示在滑块的右端。在图86中,这是921毫米,所以滑块向右移动直到范围扩展至921毫米的距离。 对于这个特定的网格扫描仪,这是在网格扫描仪和对象之间的距离达到的647毫米实现的,给予正负275毫米有效的深度范围。
虽然新的训练距离不符合原采集的距离,当询问是否继续,通过点击“确定”或“是”再次关闭对话框。
专家提醒:
对于非常小的光滑表面零件,必须移动网格扫描仪更接近零件。但是,当没有装载该零件的CAD模型,并具有当前设置的CAD模型导出功能,网格扫描仪到零件的距离是难以确定的。因此,在设置采集姿势和采集图像可能会等到训练数据库产生后。
已经改变了网格扫描仪和对象的距离,采集姿势应再次检查。再次打开菜单项“产品 - gt;选择区域和采集”。此次采集距离不同于测试距离的信息将会给出。点击“确定”这一消息,然后切换到采集距离与647 mm的取值相同。然后,检查647毫米采集距离似乎对采集是合适的。点击“确定”保存更改并关闭此对话框。
5.4采集零件图像
打开菜单“工具 - gt;抓取图片”打开可以抓取图像的对话框。这应在被连接到机器人的计算机和连接到网格扫描仪的相机间操作。
将零件放置在bin中,开始零件位于不同的地方,在仓底和/或接近bin的两侧。填充这几个部分的单一拾取区应该准确合适。设置对象顶层中的部件的大致中心的毫米高度。 对于板材,0毫米是合适的,对于位于单层较大的部件,它应该是零件高度的一半。这意味着,对于这些部件,对象的高度应设置为30毫米。
检查“单个拾取区”复选框,并选择与零件已放置相对应的拾取区。然后点击“开始采集”,等待机器人移动到第一获取姿势。在这里,你将被要求调整相机的快门和灰度。这些应被设置为使网格扫描器的图案清晰可见,在尽可能多的表面尽可能直接反射。通常情况下,最好是不超过晕染有亮点。这里给出的值似乎可以得到一个不错的图像:
|
快门 |
618 |
|
灰度 |
1500 |
这些设置得出的图像如图87所示。
调整相机设置,对于单区机器人将遍历移动整个采集姿势。
完成后,箱体(或者只是用于采集)应充满零件,以便它们被放置,便于他们生产。还记得更新对象高度,以便它实时反映部件的顶层的近似中心。在这种情况下,它被设定为120毫米,从而得到图88的图像。
数据现在应该至少从在生产过程中含有三个不同放置场景获取。每一次,你会被要求更改相机设置,但在第一次后它不是必须的。
通过点击“退出”,关闭对话框,当询问是否保存更新相机设置后,单击“是”。
当对话框被关闭,被采集的最后一张图像将被自动打开并显示在“真实图像”选项卡中。
5.5从CAD文件生成培训数据库
此时,训练数据库应被创建。此任务的每个部分将在下面进行说明。
5.5.1定义培训可视角度
再次打开培训范围菜单中的“培训 - gt;范围”。具有名称DefaultRange的培训范围已被添加,并设置以覆盖一个来自四面八方的完整的训练部分。
虽然有些地方不需要全方位的培训,手头的部分似乎没有什么特别的方式在bin内安排自己,而且同样来自四面八方可拾取,所以他们也应该是来自全方位的识别。因此,离开了滑块训练范围,如图89所示。
在看“定义的范围”组框的左下角,这应该在这个点共展示总数为842的培训图是合适的。保存默认范围内点击“OK”。
5.5.2选择功能
由于“区域点3D”功能是可用于3D传感器的唯一功能,这有过自动添加的,所以没有必要在此步骤中做多。
5.5.3调整虚拟特征提取设置
点击中央视图上方的“虚拟形象” - 面板。应显示图像加载的CAD模型。虽然这种图像可能有一个非常低的分辨率,但这
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148687],资料为PDF文档或Word文档,PDF文档可免费转换为Word

