
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
直流电机速度和位置控制系统
亚历山德鲁·莫雷尔
彼得鲁杜米特大学电机工程与应用电子技术系,罗马尼亚,999032
摘要:论文介绍了由SGS-THOMSON微电子公司制造的专用集成电路(L290,L291,L292),这个电路设计并执行了为独立激励直流电动机服务的高性能速度和位置控制系统。L290,L291和L292一起形成了完整的微处理器控制(微型计算机芯片)直流电机伺服定位系统,既快速又准确,而且拥有完整的软件功能。论文介绍了系统,每个设备的详细功能描述和设备的应用信息。
关键词:直流电机,光学编码器,开关模式驱动器,位置反馈,转速表速度反馈
1、介绍
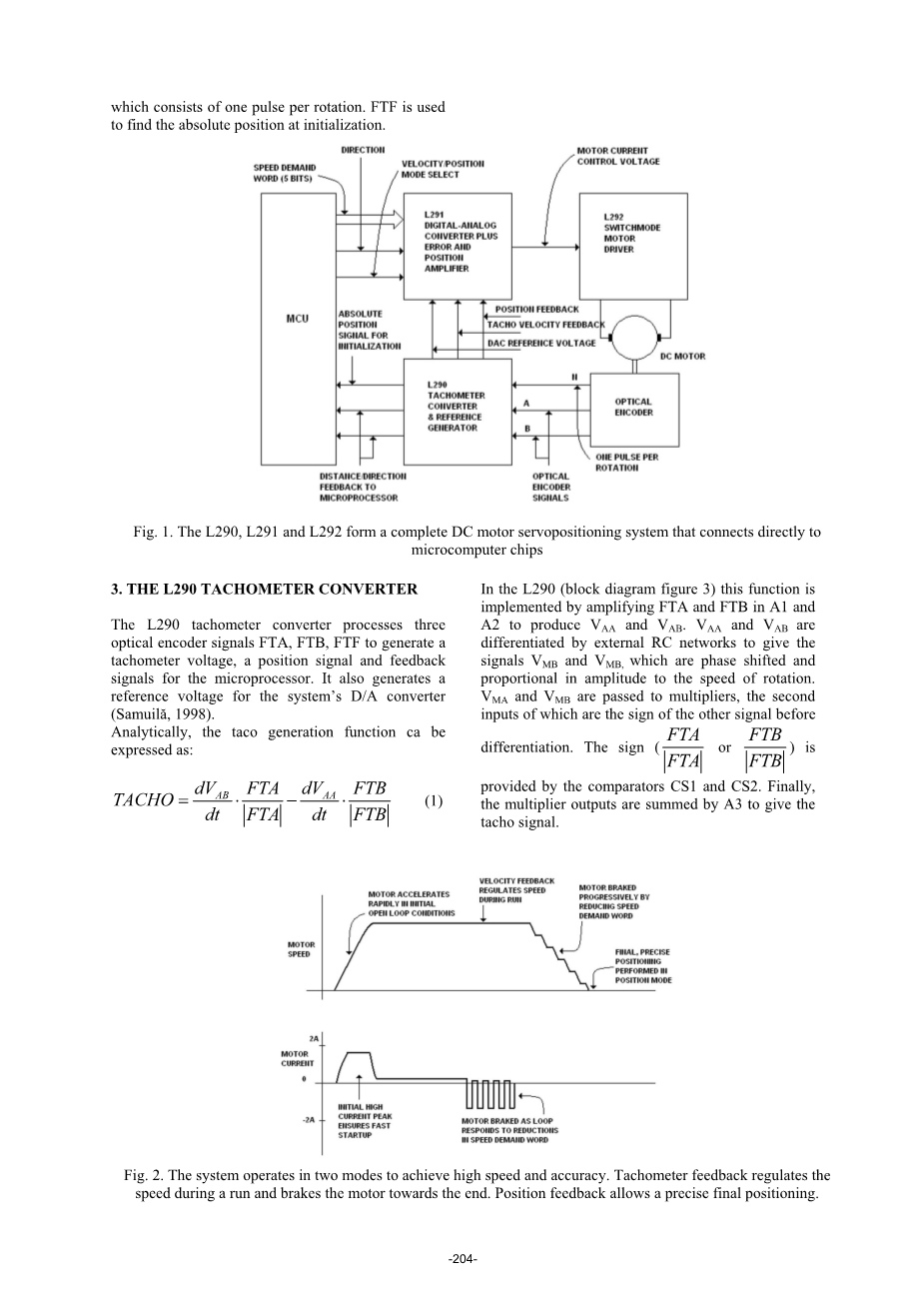
L290,L291和L292,(SGS-THOMSON,2002)主要用于直流电机和光电编码器的配置如图1,该系统(汉斯,1990)由微处理器,微控制器,和微计算机芯片组成。每个运动通过最佳速度曲线把适当的命令给L291,其中包含该系统的D / A转换器和误差放大器。该L291产生一个电压控制信号来驱动L292开关模式驱动器,为电机供电。电机轴上的光学编码器提供信号,由L290转速计时处理转换器产生转速电压反馈和位置反馈信号,为L291增加控制的距离/方向反馈,从而进行微控制。
该系统以两种模式运行,以实现闭环速度控制和闭环位置控制速度快、精确度高的目的。 这两种模式的组合允许系统快速前进到目标位置,然后在没有振铃的情况下停止。
最初,系统以速度控制模式运行。当微型计算机向L291应用速度要求字时,通常要求以最大速度开始运动。在这个时刻,电机转速为零,所以没有taco反馈,系统在开环模式下有效地工作(见图2)。在这种情况下,高电流峰值高达2A,需要赶快加速电机,以确保电机快速启动。当电机加速时,测速电压升高,系统以闭环速度模式运行,迅速向目标位置移动。监视光编码器信号(由L290平方得到的)的微型计算机在目标位置接近时逐渐降低速度要求字。每次速度要求字减小时,电机都被速度控制回路制动。最后,当速度代码为零并且目标位置非常接近时,微指令系统切换到位置模式。然后马达在所需的位置迅速停止并且被固定在电子制动器中。
2、光学编码器
在该系统中使用的光学编码器(阔,伯.1981)包括一个旋转的开槽的盘和固定的局部盘,局部盘也是开槽的。安装光源和传感器,使得编码器生成相位差为plusmn;90°的两个准正弦信号。这些信号被称为FTA和FTB。这些信号的频率表示旋转速度,相对相位差表示旋转方向。这种类型的例子是TIRO 1000(罗马尼亚制造),其具有1000个轨道。类似的类型可以从许多制造商(包括Sharp和Eleprint)获得,在罗马尼亚203卢布 - 纳波卡市的IFAC车间,经历了7月9号到7月11号三天,该编码器生成了第三个信号FTF,它每一个旋转脉冲 FTF都用于查找初始化时的绝对位置。
图1 L290,L291和L292组成一个直接连接的完整的直流电机伺服定位系统微电脑芯片
3、L290 TACHOMETER转换器
L290转速计转换器处理三个光电编码器信号FTA,FTB,FTF,分别产生转速表电压,位置信号和反馈信号。它也为系统的D / A转换器提供了参考电压(Samuilă,1998)。用公式分析的话,塔可生成函数可以表示为:
(1)
在L290(图3)中,该功能通过在A1
和A2中放大FTA和FTB信号来实现,以产生V AA和V AB。V AA和V AB由外部RC网络分化,从而给出信号V MB和V MB,它们相位移和幅度与旋转速度成比例,V MA和V MB被传递给乘法器,其中第二个输入是在其他信号前就被分化了。
该符号()由比较器CS1和CS2表示。 最后,A3求和由乘法器输出给出信号。
图2系统以两种模式运行从而实现速度块和准确度高的目的。转速计反馈调节运行期间的速度,并将电机制动到最后,位置反馈允许精确的最终定位。
这种看似复杂的方法有三个重要的优势。 首先,由于CSA和CSB的峰值和零点趋于抵消,所以纹波是微小的。其次,纹波频率是基本的第四和谐,所以它可以被过滤,而不会限制速度的带宽。 最后,可以更快地获取Taco信息,给出良好的响应时间和瞬态响应(辛哈,1985)。微处理器STA,STB和STF的反馈信号是通过对FTA,FTB和FTF进行平方运算生成的。STA和STB由微型用于跟踪位置,STF用于初始化以找到绝对位置。L291的位置反馈简单地从A1的输出获得。
L290还为L291的D / A转换器生成参考电压。该参考源自V AA和V AB,具有以下功能:
(2)
由于taco电压也是从V AA和V AB得出的,因此系统是自补偿的,并且可以忍受输入电平变化,温度变化和元件老化的变化,同时得到性能的改善。
图3 LL90处理编码器信号,产生用于微处理器的L291从而增加反馈信号的taco电压和位置信号。 此外,它为L291的D / A生成参考电压。
图4 L291将系统连接到主处理器。它包含系统D/A转换器,主要误差放大器和位置放大器
4、 L291 D / A转换器和更换器
图4所示的L291(Năvrăpescu,等,1999)连接了系统与微型处理器,并包含系统的主误差放大器和位置放大器,拥有可以独立调整位置环的特性。它包含具有可切换极性的可用位D / A转换器,可以从L290引用它。控制电机方向的极性由微处理器使用SIGN输入控制。D / A转换器输出主要误差放大器和转速信号产生电机驱动信号ERRV。其提供的位置放大器用于位置环增益特性的独立调整。
把进入/退出电路调到选择模式,最终位置模式实际上是“速度加上”,但是由于测速电压几乎是zerowhen位置模式,因此速度环路的影响可以忽略不计。
5、L292开关模式电机
L292可以视为功率跨导放大器(Băluţă,2004)- 它是与L291的控制电压(ERRV)成比例的电机电流。它在开关模式下驱动无功,并且在内设置了电流反馈回路,以确保电机电流始终与输入控制信号成比例。首先将输入控制信号(见图5中的模块图)移位,产生一个单极信号(L292有一个电源),并通过误差放大器与电流反馈信号相加。所产生的误差信号用于调制驱动输出级的开关脉冲。外部检测电阻监测负载电流,通过电流感应放大器将电机电流信息反馈给误差放大器。L292(Teodorescu,1998)采用自己的电压参考和电机闭环电流控制所需的所有功能。此外,它具有两个使能输入,其中一个可用于实现功率抑制功能。L292的输出级(Williams,1987)是能够在36V下处理高达2A的桥接配置。
图5 L292开关模式驱动器从L291接收一个控制电压,并向电动机提供一个开关调节电流
图6 实现实验精密定位直线轴系统的综合视图
6、接触微观和结论
在一个典型的系统中,L290/1/2系统通过十条I/O线连接到控制微型计算机:七个用来输出和三个用来输入(Mohan等,1989)。输出全部连接到L291D/A,5位速度要求字,SIGN(设定方向)和速度/位置模式选择线。Micro的位置反馈来自于L290转速转换器,由信号STA,STAB(平方码输出)加上每脉冲单脉冲STF组成。
为了跟踪电机位置,微计数STA脉冲用来测量行驶距离,并比较STA和STB的相位以感测方向。最方便的方法是将STA线路连接到中断输入。然后,中断服务程序将对STB进行取样,并根据相对相位差增加或减少位数:STB为高时为 90°;如果STB为低,则为-90°。
可以认为,微型控制方向不需要对旋转的方向进行注释。然而,实际上,最好是通过方向来确定电机被外部施加的力量移动的可能性。
对于每个移动,micro会计算要行驶的距离并确定正确的方向。然后将L291设置为速度反馈模式,适当设置导向器,并设置最大速度的速度要求字(如果移动很短,则可能较小)。
通过STA中断服务程序,它可以改变位置,当目标位置非常接近时,减小速度限制字来制动电机。最后,微订单将L291切换到最终定位循环控制系统。
当系统通电时,机械系统可能处于任何位置,所以第一步是把它初始化。在光学编码器的应用中,例如,打字机的菊花轮,通过缓慢旋转电机,直到检测到STF信号(每旋转一个脉冲)才完成。当光学编码器多次旋转时,“每旋转一个脉冲”信号是不够的。一个例子是计算机打印机的托架定位伺服器。在这种情况下,最简单的解决方案是将一个微动开关安装在其中一个档块上。首先,电机慢慢向后运动,直到发动机撞到终点。然后它向前移动直到检测到STF信号。这种解决方案的优点是终端微动开关不需要准确地定位。实验研究已经在电气工程学院电气实验室塔古雷若斯大学进行了测试,使用单轴数控机床(由一个直流电动机 光学编码器控制)进行了测试。CNC原型线性轴包括应用程序,这是理想的教育和工业应用程序。图6显示了实现的精密定位线性轴系统的总体视图。
参考文献
Băluţă, Gh., Acion?ri electrice de mic putere. Aplicaii, Editura Politehnium, ISBN 973-621-072-3, Iaşi, 2004.
Hans, T., Asservissements numerique, Ezrolles, Paris,
1990.
Kuo, B.,C., Kelemen, A., Crivii, M., Trifa, V. Sisteme de comandi reglare incremental a poziiei, Editura Tehnică, Bucureşti, 1981.
Mohan, N., Undeland, T.M., Robbins, W.P., Power Electronics: Converters, Application and Design, John Wiley amp; Sons, New York, 1989.
Năvrăpescu, V., Covrig, M., Popescu, M., Todos, P., Acionri electrice de curent continuu, Editura ICPE, Bucureşti, 1999.
Samuilă, A., Maini i acionri electrice cu turaie variabil, Editura MEDIAMIRA, Cluj-Napoca, 1998.
Sinha, P. K., Microprocessors for Engineers: Interfacing for Real Time Applications, Yohn Wiley amp; Sons, Chichester, 1985.
Teodorescu, D., Automatizri microelectronice, Editura Tehnică, Bucureşti, 1998.
Vasile, N., Şlaiher, S., Servomotoare electrice. Teorie, calcul, aplicaii, vol. I, vol. II, Editura Electra, ISBN 973-8067-64-2, ISBN 973- 8067-65-0, Bucureşti, 2002.
Williams, B.W., Power Electronics: Devices, Drivers and Applications, John Wiley amp; Sons, New York, 1987.
*** HARRIS SEMICONDUCTOR, Data Book, 2004.
*** Industrial and Computer Peripheral ICrsquo;s, SGS- THOMSON, Data Book, 2002.
*** INTERNATIONAL RECTIFIER, Data Catalog, 2003.
**** LEM MODULE, Data Book, 1992.
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[28421],资料为PDF文档或Word文档,PDF文档可免费转换为Word

