英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
利用匹配差分干涉和相位生成载波技术的非本征法布里珀罗传感器
摘要
为了多种应用,基于最先进MEMS技术的非本征光纤法布里珀罗干涉仪传感器(EFPI)的制作已经被集中研究。然而,对于某些特定的应用,尤其是涉及高频动态传感的信号检测技术仍然不够。在本文中,我们提出了一个对于动态EFPI传感器检测利用相位生成载波(PGC)调制方式的白光路径匹配差分干涉系统。光纤迈克尔逊干涉仪(MI)与EFPI传感器级联作为干涉仪,MI的一个臂包含一个辅助步进电机可移动镜-准直器对,以实现精确的路径匹配,另一个臂缠绕在压电传感器环上,引入用于PGC解调的载波信号。系统总体设计的原则会进行详细介绍。实验结果显示,传感信号可以在低失真情况下正确恢复。相位噪声频谱水平在1kHz时低至。现在提出的监测方案可能在许多动态EFPI感测领域中找到有前景的应用,例如声学和振动感测等。
关键词 动态传感,法布里珀罗,光学零差,路径匹配差分干涉,相位生成载波
- 绪论
光纤非本征F-P干涉仪(EFPI)传感器,尤其是由MEMS技术制成的传感器呈现了独一无二的特点,比如成本低、生产率高、可靠性好等,这些优势也让这类传感器在很多领域都具有竞争力和吸引力。目前广泛研究的调制方案是基于频谱检测,通常只对静态或准静态传感有效。对于动态感测,基于强度的正交点解调方法是一种易于实施和广泛使用的方案。然而,正交点也很容易受到外界扰动的影响,扰动不可能完全避免的。此外,调制系统对于光功率微小的变化十分敏感。人们已经做出了很大努力来最小化工作点漂移和不希望的功率波动的影响。但是所有的方法都有各自的缺点,并且应用领域有限。
白光路径匹配的差分干涉(WL-PMDI)的概念的首次提出是在上世纪80年代中期。在WL-PMDI解调方案,输出的是相位信号。因此,这种方法自然继承了相位解调的优点,其中最重要的是对光功率波动不敏感。然而,因为路径匹配困难,WL-PMDI方法在很长一段时间内只引起了很少的注意。近年来,基于该方案的微型光纤EFPI声学传感器引起了越来越多的兴趣。参考文献已经展示了对于EFPI解调采用多步相移算法的WL-PMDI方案的能力。然而,该方案需要高采样率来获得足够小的相移误差。
在本文中,通过结合经典相位生成载波(PGC)光学外差技术和WL-PMDI方案,我们提出一种EFPI调制方式。这种方式要求较低的采样率并能提供改进后的结果。在第二十三次光纤传感器会议上报告了审讯系统的初步结果。本文详细介绍了讯问系统的原理、结构和结果。
- 研究方法
在这个部分,我们介绍在一般测量中WL-PMDI系统的组成配置。PMDI系统的原则是在Fabry Perot谐振子模型的基础上推导。然后讨论了相位载波的实现。所有这些传感性能的分析都以条纹可见度为重要参数。
- PMDI的原则
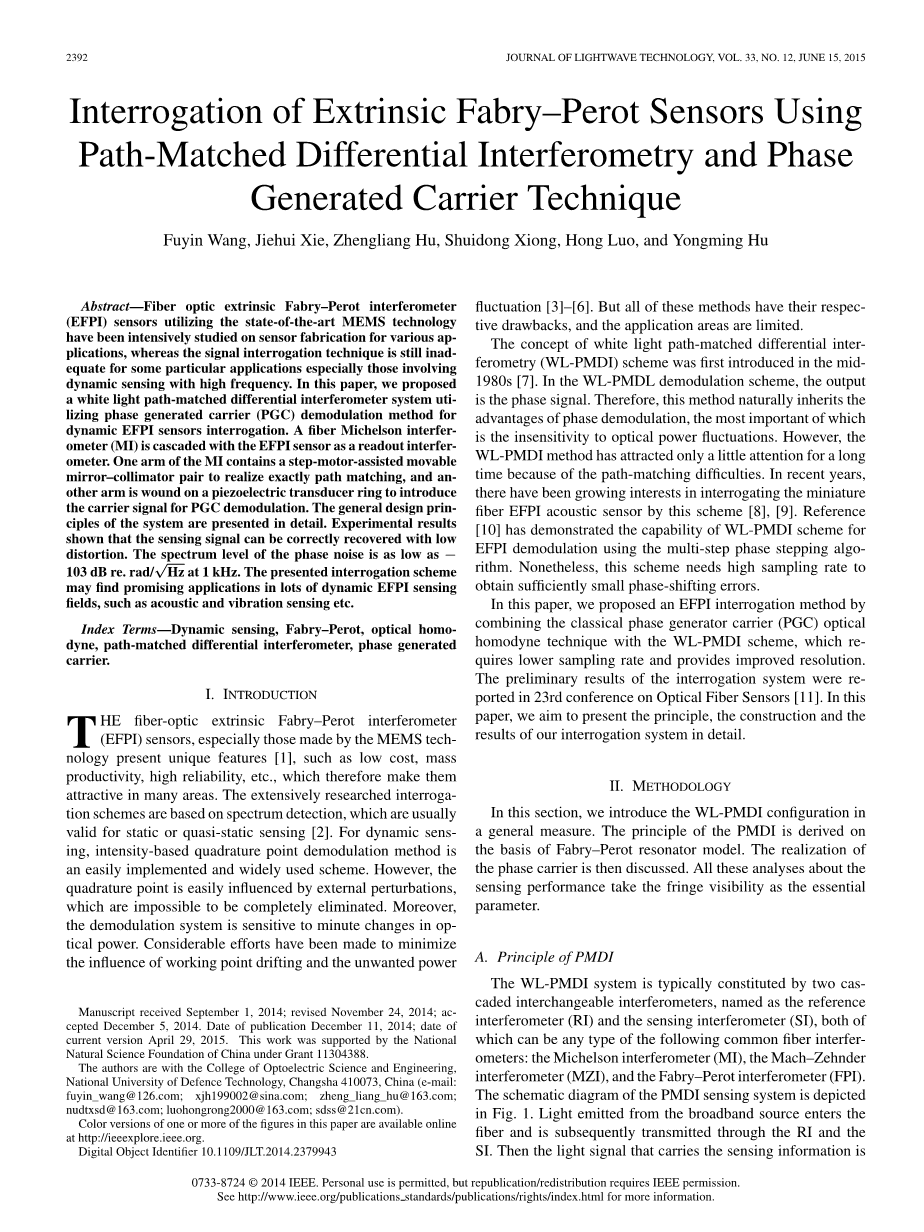
WL-PMDI系统通常由两个级联的可互换干涉仪(称为参考干涉仪(RI)和传感干涉仪(SI))构成,两者可以是任何类型的常见光纤干涉仪:迈克尔逊干涉仪(MI),Mach-Zehnder干涉仪(MZI)和法布里珀罗干涉仪(FPI)。PMDI传感系统的原理图如图1所示,从宽带光源发出的光进入光纤,随后通过RI和SI传输。通过光电检测器(PD)检测携带传感信息的光信号,用于信号恢复。RI在系统中作为读出干涉仪。
图 1 PMDI结构图 a,b,c分别代表MI,MZI,FPI.
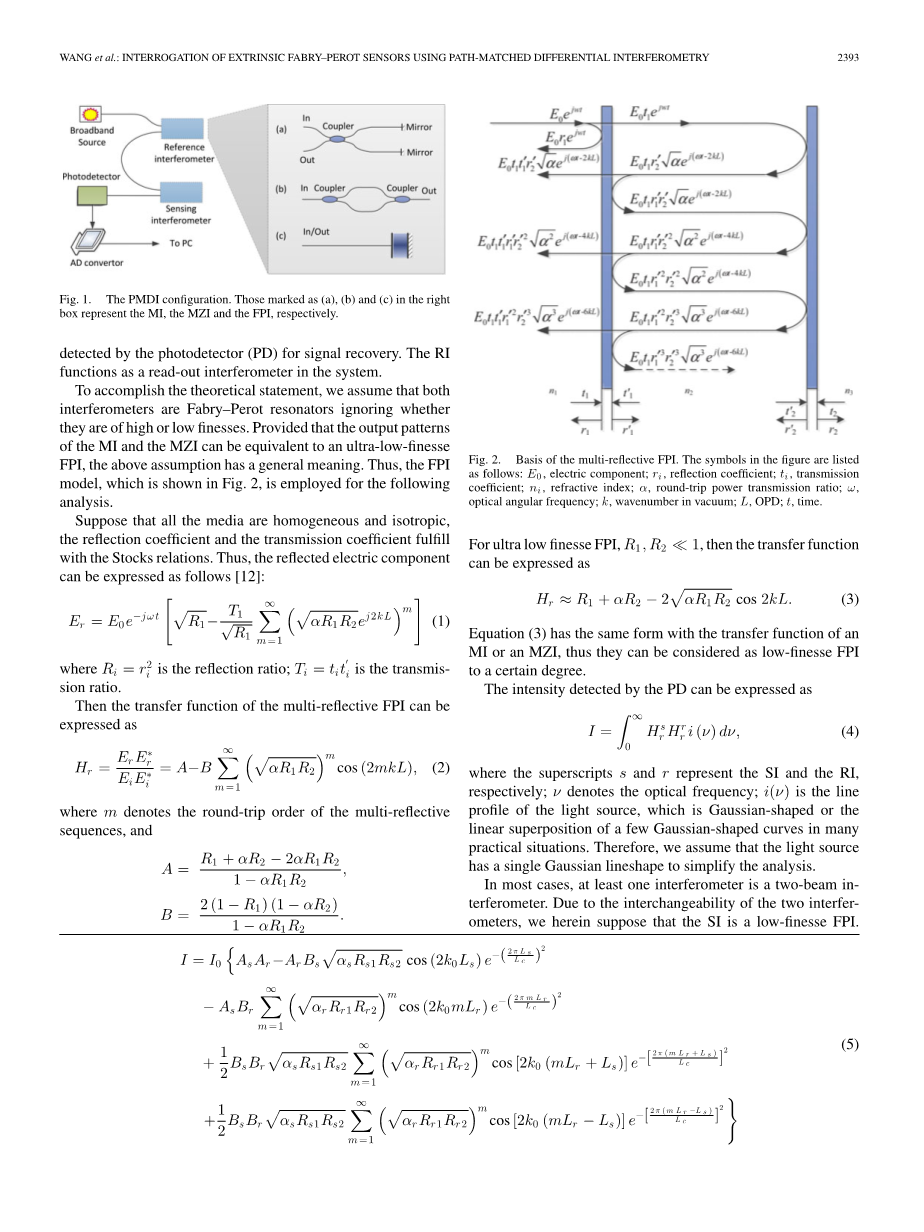
为了实现理论上的说法,我们假定两个干涉仪都是法布里珀罗谐振器并忽略他们高或者低的精细度。只要MI和MZI的输出模式可以等价于一个超低精度的FPI,上述假设都具有普遍意义。因此,图二所示的FPI模型,将应用如下分析。
假设所有介质都是均匀各向同性的,反射系数和透射系数都满足斯托克斯关系。因此,反射的电分量可以表示如下。
(1)
其中是反射率;是透射率。那么多级反射FPI的传递函数可以表示为:
(2)
其中m表示多反射序列的往返次序,且
图 2 多反射FPI的基础 图中的符号在下面列出:电分量;反射系数;透射系数;折射率;往返功率传输率;角频率;真空中的波数;;时间。
对于超低精度FPI,,,传递函数可以表示为:
(3)
式(3)与MI或者MZI的传递函数有相同的形式,因此在某种程度上它们可以被看做是低精细度FPI。
光电探测器的探测到的光强可以被表示为:
(4)
其中字母和分别代表SI和RI,表示光频率,是光源频率的包络线,在实际中一般是高斯型或若干高斯曲线的线性叠加。因此,我们假设光源有一个单一的高斯线型来简化分析。
在很多情况下,至少一个干涉器是双光束干涉器。由于两个干涉器的可交换性,我们这里假设SI是低精细度的FPI。
将式(2)带入式(4)中产生式(5)
(5)
其中是光源相干长度。
在式(5)中所有与光程差(OPD)有关的项都呈指数衰减。WL-PMDI配置要求在各个干涉仪中分开传输后光线是不相干的。这就导致。
式(5)中交流分量的幅值可以分为两个部分,他们分别是反射比引起的衰减(称为Part 1)和OPD引起衰减(称为Part 2)的体现。假设SI的光程差与RI的m阶干涉相匹配,则所有其他干涉阶数不匹配,这意味着所有其他阶的OPD失配至少大于光源相干长度的一半。这导致在Part 2中非路径匹配的项至少衰减倍。此外,使SI和低精细度的FPI比如RI的高阶干涉匹配是不可能的,在其他路径匹配的情况中,Part 1中路径匹配阶数m的变化不改变其定量的阶数。从中可以得出结论,所有的非路径匹配项大约比完美路径匹配项小一万倍。我们现在可以简化式(5)
(6)
式(6)是SI光程差和多反射RI的m阶光程差匹配的WL-PMDI输出结果。式(6)中的第二项通常被认为是干涉条纹的交流成分。当路径匹配阶数m增大,交流成分的振幅急剧下降,这会降低条纹的可见性。因此,高阶路径匹配变得十分困难。为此,PMDI通常考虑两个低精细度的干涉仪。自然地,式(6)变为:
(7)
其中和分别代表SI和RI的可见性。WL-PMDI的条纹可见度是两个干涉仪可见度乘积的一半,其理论值小于0.5,并且高度依赖于两个级联干涉仪的传输特性。
B.PGC的实现
在式(6)中只有交流分量与传感信息有关。因此,交流分量的振幅应该尽可能大。此外,相位调制应该用来消除由光功率波动和条纹相位漂移引起的扰动。对于低精细度FPI,反射光的功率很小。更糟的是,如果SI也是一个低精细度FPI,那么只有一小部分的入射光被反射,这会导致探测困难和大量的相位噪声。因此,MI被用作系统中的RI。
PMDI的相位解调要求对相位进行高频调制以克服光功率波动的影响,类似于长臂干涉仪。我们利用PGC技术从相位调制条纹中重建传感信号。在这个状态,,,和应该一致。此外,应该增加RI的可见度以提高传感性能。这要求SI的两束反射光的功率彼此一致等等。必须和相等。因此,光电探测器探测到的干涉强度可以修正为:
(8)
其中代表相位调制深度,代表相位调制角频率,代表干涉强度的相移。
式(8)中的交流分量(Part 2)是路径失配的函数,其中也包括传感信号。其振幅随着路径失调呈指数衰减,意味着条纹的可见度不会达到其理论上的最大值,除非两个干涉仪达到完美路径匹配。此外,交流分量也高度依赖于光源的相干长度,带宽较窄的宽带光源将有利于路径匹配。
微分交叉相乘算法用于从相位调制干涉信号中恢复出原相位。该算法被广泛应用于低频通信领域,并被证明有高分辨率,高精度,大动态范围,高线性度和低成本等一系列突出的特点。
- 实验和讨论
迄今为止,已经阐述了相位调制的WL-PMDI方案的理论。在本节中,通过低精度EFPI传感器实现具有相位调制动态感测的实验WL-PMDI干涉系统,以确认上述分析。在MI的一个臂中成对使用光纤准直器和步进电机(最高精度,10 nm)辅助可移动反射镜,以实现与EFPI传感器的路径匹配。另一个臂部分缠绕在压电换能器(PZT)环上,在那里可以施加调制电压来实现相位调制。传感元件是一种基于微机械振膜的自制低精度光纤EFPI声学传感器。
- 路径测量与匹配
第一步是匹配两个干涉仪的光程。因此,需要提取两个干涉仪的光程差。这个过程可以通过获取和检索两个干涉仪的反射光谱实现。光谱获取系统如图3所示,使用四通道激光扫描干涉仪(Micron Optics Inc, sm125)来同时获取MI和EFPI的光谱。
图 3光谱获取系统结构图
然后运用傅里叶变换(FT)的方法代替直接比较光谱去定量获得路径失配程度。采集的光谱被去峰化,然后通过快速傅立叶变换(FFT)算法进行变换。光谱可以被写成:
(9)
其中是在傅里叶频域中最大的数字指数,是获取的光谱的中心波长,代表一帧光谱中样本的数量,是相邻样本的波长间隔。
由于等于光谱的样本波长范围,典型值为,FFT算法的OPD结果大约只有,很难满足路径匹配分辨率的要求。考虑到MI的低频漂移和光纤长度波动在几百纳米至几微米的范围内,不需要超高的OPD分辨率。假设光源的相干长度大约是,两个干涉仪的路径失配(相干长度的5%)将会导致可见度下降9.4%。因此,OPD的分辨率只需要被提高几倍即可。在FFT算法中,OPD的分辨率与器件的分辨率无关,但是和光谱的样本波长范围成比例。提高样本范围可以提升OPD的分辨率。然而,这要求光源具有更宽的波长范围。当硬件设备保持不变时,一个替代方案是通过改变OPD解调算法来改进解调分辨率。此外,这个方案在灵活性和多样性上都具有优势。
在这个系统中,我们通过在周围的后续啁啾z变换来改进FT方法以改善局部傅立叶频率并提高分辨率。使用这种改进的OPD询问算法获得好于的分辨率。然后从EFPI的OPD中减掉MI的OPD可计算PMDI的OPD不匹配量。剩余的OPD不匹配用于控制路径匹配过程。
根据之前提出的算法计算出的OPD不匹配量,可调节步进电机来改变MI的OPD使其与EFPI传感器的OPD匹配。每次调节MI的OPD后,需要两个干涉仪的干涉光谱的两帧,然后重新计算OPD的不匹配量。计算结果作为下一次的调节的基础。调节过程的结果如图4所示:
图 4 WL-PMDI路径匹配的结果 (a)表示路径匹配过程中不匹配,x轴表示sm125获取的光谱的帧数目。(b)PMDI之后MI和EFPI的反射光谱路径匹配良好
通过简单调节步进电机,路径不匹配量可以调节到少于(见图4(a))。相比于图4(b)中的EFPI,MI的光谱在相位上有的位移,这说明两个干涉仪已经匹配。MI峰值和谷值的逐渐变化可能是由极化问题引起的,例如由应力引起的波长相关极化不确定性。但是,它不会影响我们系统中的OPD计算。此外,通过使用具有自然偏振态的白光源,可以大大减轻这种影响。在整个样本波长范围内,传感EFPI的光谱的极大极小值之比绝大时候大于。这表示EFPI的可见度大于0.98.此外,MI光谱的峰值大约在,大于EFPI传感器的峰值。假设两个通道的发射功率相同,EFPI传感器的峰值反射率通常只有该MI的五分之一。
- 声学传感解调
两个干涉仪的路径匹配完成以后,它们与光源(总功率,0.93mw;-3dB 带宽,63.9nm;线型,高斯型)和一个探测器串联(FEMTO,OE-200-IN,增益:,带宽:)。实验装置图如图5所示。正弦调制电压由任意函数发生器(Tektronix,AFG - 3022B)产生,以驱动光纤缠绕的PZT环来调制PMDI条纹,调制频率为12.5 kHz。
图 5 EFPI传感的WL-PMDI PGC系统实验装置图
通过扬声器将声压施加到传感器以测试传感系统的响应。干涉条纹由A / D转换器(National Instruments,USB-6251)检测和数字化,其采样率设置为100 kHz。然后通过将信号存储并利用PC软件进行处理。原始干涉信号和解调输出分别在图6中示出。
图 6 EFPI传感器的原始信号和解调信号
时域和频域上数字化的光强分别如图6(a)的顶部和底部所示,同时解调输出信号如图6(b)所示。显然条纹已经被相位调制,调制深度大约为。由图6(a)中计算的条纹可见度大约为0.33,相应的理论值为0.49。二者之间的差异源于MI的极化衰落。此外,输出结果的谐波失真小于。这些结果已经证明了基于PGC技术的WL-PMDI干涉系统的动态传感能力。
底噪声也被测量。MI和EFPI传感器都安装在屏蔽平台上以隔离振动。通过这种方式,与系统耦合的机械振动大大减弱。结果绘制在图7中,超过时的相位噪声水平小于,在的典型值为,在传感应用中是相对较低的噪声水平。尽管宽谱光源的频率噪声比在长臂干涉仪中使用的超窄线宽激光要大得多,WL-PMDI系统的OPD要小得多。鉴于相位噪声和频率噪声与OPD乘积呈正相关,相位噪声水平与一些传统的高相干光零差系统相当。当频率范围小于时,噪声分布大约呈分布。考虑到MI的一个臂由两个具有机械部件的空间光学部件组成,机械噪声不能完全消除,特别是低频振动噪声。 相对较强的低频相位噪声主要由RI引起,如OPD干扰,基础振动引起的机械噪声和极化引起的相位衰减。
图 7 传感系统的相位噪声水平
- 结论
总之,我们提出了基于PGC技术的步进电机辅助WL-PMDI系统来调制EFPI传感器。一根专门设
全文共5811字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[12329],资料为PDF文档或Word文档,PDF文档可免费转换为Word

