英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
基于全球导航卫星系统的高精度虚拟电子围栏管理技术
XuYuan 1,2,Jin senlin1,3,Zhong chongxia1,2,Liang Wei 1,2,Huang Yan 1,2,Yao Hejun 1,2
1、北京省计量科学研究院,北京100029,中国
2,行业的全球导航卫星系统,北京100029国家计量中心、中国
3北京工业大学,北京100124,中国
电子邮件:jinsl@bjjl.cn
摘要
随着自行车共享的兴起,它不仅满足人们对短距离旅行的大量要求,而且还有助于消除城市ILLS,例如交通堵塞,环境污染等。它的使用极大地促进了在摆脱停车位的困扰时的方便性,但又有一些新的情况,如违规的停车行为引发的交通环境对可持续发展有影响的问题。在本文中,提出了一种高精度虚拟的,基于GNSS的电子围栏技术、智能终端并提出了精确定位算法。此外,共享单车的常规停车管理和通过BDS实现智能调度的准确性与GPS GLONASS和GALILEO兼容。Sub-meter在虚拟电子围栏中实现了定位精度技巧,以及共享单车的这些技巧的准确率已超过90%。
关键词:共享自行车; BDS;虚拟电子围栏;智能终端
简介
随着物联网技术的发展,每一件商品都可以接入互联网,因此,利用互联网进行信息交换和新闻发布,实现智能识别、定位、跟踪、监控和管理,已成为一种时尚[1]。共享单车,或公共自行车项目,近年来已经受到越来越多的重视。这种活动是为了增强资源循环使用,改善第一个英里或者最后一个英里与其他交通方式的连接,并减少我们的交通活动对环境的影响[ 2 ]。一方面满足了人们对短途旅行的需求。另一方面,由于不占太大的停车位,有助于解决城市交通拥堵、环境污染等问题,大大提高了共享单车的使用便利性,但不规范停车等问题又引发了新的交通环境问题[3]。
为解决这些问题,我们第一次将高精度虚拟电子围栏管理技术应用于共享单车的停车管理,并且达到了理想的效果。虚拟电子围栏管理技术通常是指通过信号和信号反馈产生边界并在边界内进行干预的信息系统,用于生物保护和放牧管理等[ 4-6 ]。目前大多数的自主编程系统使用来自全球导航卫星系统(GNSS)发出的无线电频率(RF)信号来生成边界。在计算机设备中,地理信息系统(GIS)里的算法利用GNSS和其他数据来确定对象上的提示,或暗示,应该怎么用以及使用多久[6,7]。1987,首次采用虚拟电子围栏技术实现对牲畜的控制,从而验证了研究商品化的概念。定制系统已经证明,虚拟围栏技术可以成功的在地上实现牛的转移。然而,由于大气和卫星轨道在GNSS定位精度控制的影响,目前卫星导航定位系统还无法满足高精度电子围栏技术共享单车的实现的需求[11-13]。
在本文中,我们利用北斗卫星导航系统、智能终端中的定位芯片和精确定位算法,实现了高精度(代替实物仪表的)虚拟电子围栏管理技术。通过实验测试,我们发现监测精度达到90%以上。
系统结构设计
虚拟电子围栏管理技术通过虚拟边界数据服务器,通过智能卫星芯片来确定位置信息,问题询问和回馈在导航系统和智能终端之间进行,最终利用定位算法来确定目标位置的界限之内,从而实现对共享单车的智能化管理。整个系统由两部分组成:
- 硬件结构
(1)全球导航卫星系统(GNSS)
全球导航卫星系统的定位是利用一组卫星的伪距、星历表,卫星发射时间和其他的观测,但也必须知道用户时钟差。全球导航卫星系统是以空气为基础的。无线电导航定位系统提供给用户全天候的在地球表面或附近的地球空间的每一个位置的三维坐标速度和时间信息。当前国际全球导航卫星系统主要包括GPS、GLONASS、Galileo和BDS [ 14, 15 ]。
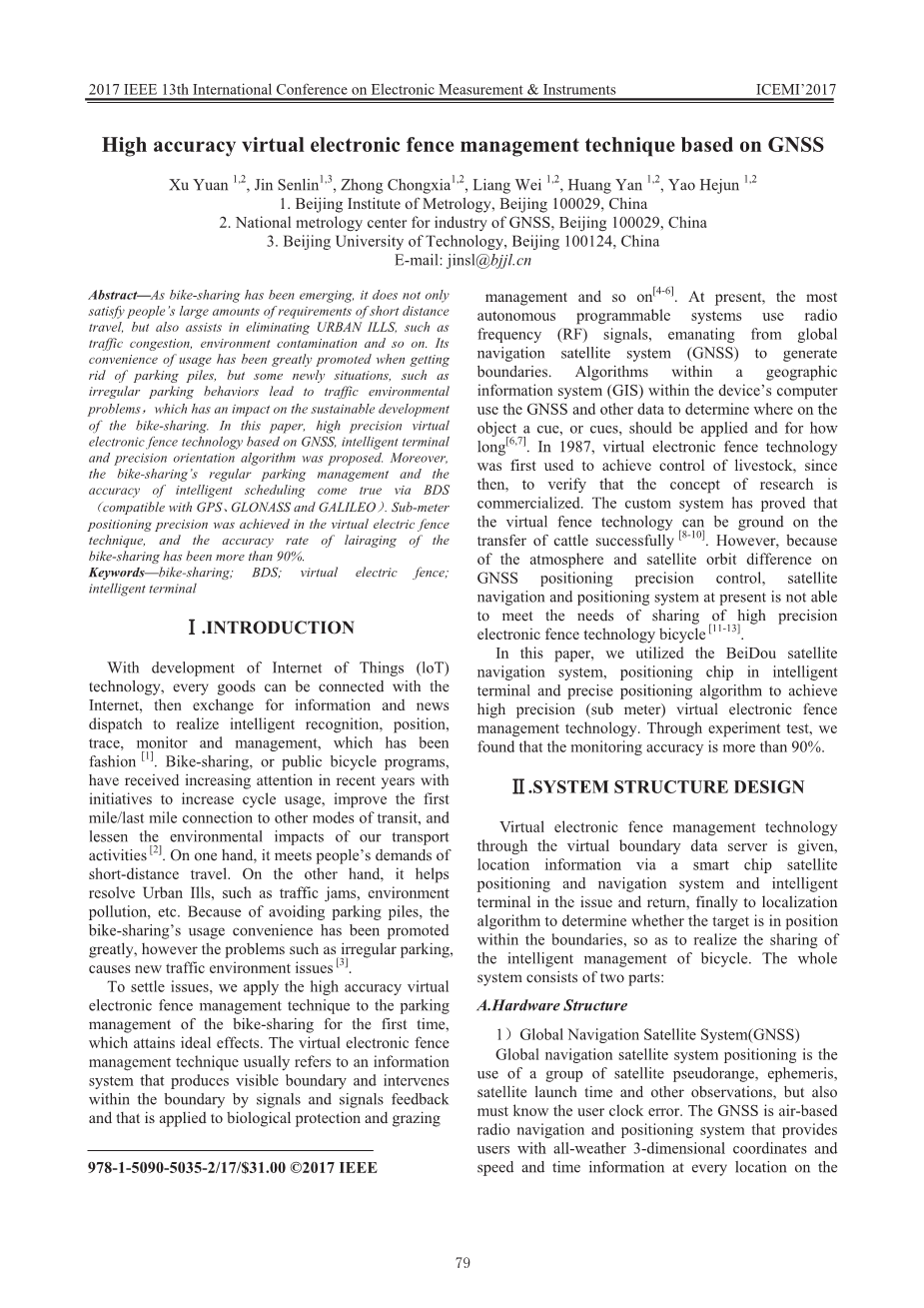
图1基于全球导航卫星系统的虚拟围栏管理系统示意图
北斗卫星导航系统(BDS)由:空间段、地面段和用户段,这三个部分组成。在全球范围内,它提供全天候、高精度、全时段可靠的各类用户定位、导航、定时和短信息服务。同时它具有通信能力,已开始采用区域性导航和定位以及计时能力,定位精度为10米,测量精度为0.2米/秒,定时精度为10 ns。在该系统在本文的应用中,我们主要采用定位和智能终端芯片进行通信,以便确定共享单车的位置。
(2)地理信息系统
地理信息系统(GIS)是支持在计算机硬件和软件系统中,对整个或部分地球表面(包括大气)空间进行地理分布的数据采集、存储、管理、操作、分析、显示和描述的技术系统。
GIS包含位置信息,结合大量的虚拟坐标来设置电子围栏边界,并将边界位置信息发送给用户。它可以与智能终端通信,接收相应的位置信息和定位算法,将校正后的信息反馈给智能终端。
(3)智能终端
一般来说,智能终端是一种嵌入式计算机系统设备,其架构框架和嵌入式系统架构是相同的; 与此同时,智能终端作为嵌入式系统应用的一个方向,场景设置的应用更加清晰,因此其架构比普通嵌入式系统架构更清晰,粒度更细,并具有一定的自身特点。
本文中智能终端配备了共享单车的功能,它包含三个电子模块:第一个是定位模块,发送位置信息; 二是通信模块,负责与服务器的数字通信; 第三个是数据处理模块,最初用于相关信息的处理。
-
算法和实现
由于虚拟电子围栏的尺寸和边界坐标由服务器提供,因此可以通过访问GNSS来获得共享单车的位置信息,因此可以通过以下步骤来监控共享单车:
(1)通过卫星定位系统和智能终端中的定位芯片,可以获得共享单车的位置坐标。
(2)可以通过GIS来确认虚拟电子围栏的边界坐标。
(3)根据公式1和公式2,分别计算虚拟电子围栏四个边界之间的距离,以确定所得坐标是否在边界内;如果它与两个边界的距离小于边界的长度,则表明它位于虚拟围栏内;如果不是,则表明它已经脱离了虚拟围栏。由于卫星定位的精度不够,共享单车往往不在虚拟电子围栏的位置坐标中,无法进行精确管理。但通过设置逻辑围栏可以提高管理的性能。
C=sin(MLatA)times;sin(MLatB) times;cos(MLonA-LonB) ﹢cos(MLatA) times;cos(MLatB) (1)
假设A的经纬度第一点为A(LonA,LatA),经度第二点B为(LonB,LatB),根据0经度东经参考,取正(经度)。纬度,负90度,南纬,纬度正90,两者的纬度值处理后计算为(MLonA,MLatA)和(MLonB,MLatB)。 然后,根据三角形推论,我们可以得到以下公式
计算两点之间的距离:
距离=Rtimes;arccos(c) times;Pi;/180 (2)
通过共享单车的位置坐标,分别计算虚拟电子围栏四个边界与坐标之间的距离,以确认是否在边界内;
(4)识别出所有共享单车的位置后,在围栏中,所有的共享单车被认为是一个整体,并且它们的质心由质心计算公式计算;
(5)判定者使用CEP作为中心内的质心圆的半径,进行数据正态性测试和样本数据的独立性测试,然后设置逻辑围栏大小和判断共享单车是否被放入围栏内。测量离散的二维的真实的点的位置,以圆圈的真实位置为圆心,其偏离圈子的中心的概率是50%,这个概率就是圆误差概率(CEP)。
CEP=0.59(sigma;psi;﹢sigma;lambda;) (3)
CEP95(也称为R95)是一种二维点精度分布度量标准,以天线的实际位置为圆的中心,其偏离圆心的概率为95%。 当概率是95%时,有:
CEP95=CEPtimes;2.08=1.2272(sigma;psi;﹢sigma;lambda;) (4)
实验结果
仿真结果在北京城市计量研究院卫星导航定位和定时工业测量中得到了验证。试验中心实验室的环境条件为:温度22摄氏度,湿度测试40%RH。应答器使用模拟的无线传输卫星信号,测试场景则是使用测试场景。场景时间是UTC时间:从2017年5月9日8点到9点。标准坐标为5月8日北京通州区第一个边界点坐标(纬度经度e116.632295, n39.892793)的电子围栏。激活第一个共享单车的定位终端,通过串口将每个终端锁定上载到计算机的定位数据,一旦打开,锁定后,终端自动上传8个有效的定位点数据。在下一次重新启动切换锁定模块之前,根据定位时间判断的结果,将数据格式发送到终端位置。每上传一个有效数据,将会关闭终端的格式化命令。
通过特殊的分析和评价软件对这个测试结果进行处理和评估。
图2理想情况下模拟测试中的定位误差
- 对理想状态的模拟测试(时钟误差,对流层误差和电离层误差)
首先,通过串口上传的位置数据对智能定位终端进行检测。每次开关锁定后,北斗智能终端定位模块开始冷启动。有效定位后,上传6-8个定位点的数据。通过检测串口上传的位置数据,可以评估导航芯片的性能。其次,进行验证服务器平台报告的位置数据的验证。下一次开关锁模块重启后,服务器平台将终端上报的数据推送到实验室进行验证。共享单车的位置数据是基于平台发送的位置信息。 25组测试数据由200个定位点组成,水平定位误差lt;2m,芯片符合工厂指标,并可提供定位服务。
(2)引入多径效应,随机误差和等误差模型测试。
图3引入多径效应引起的结果定位误差
25组测试数据由200个定位点组成,水平定位误差lt;3m,2点测量值异常。 水平定位误差约为22米。 因此,该算法基于最近的去均值滤波算法来检测离群值。均值滤波算法基于统计理论,能够有效抑制非线性信号处理技术的噪声。 它通常用于图像处理中的平滑和去噪。 基本原理是根据灰度级对图像中正常像素点附近的每个邻域中的像素进行排序,然后输出该组的平均值作为该像素的值。 均值滤波器定义如下:
g(x,y)=mean{f(s,t)},s,tisin;Sxy (5)
其中g(x,y)是(x,y)点的输出值,f(s,t)是以(x,y)为中心的邻域中(s,t)点的输入值,Sxy是一个以(x,y)为中心的邻域。邻域的类型可以根据研究或应用需要选择正方形,一种字体的形状,十字形,x形等,邻域的大小一般可以选择3times;3,5times;5。本文中过滤的数据类型是等效的使用锯齿形窗口。均值滤波器可以消除图像中的盐分和胡椒噪声以及突变点,但会改变图像中的原始数据。基于最接近的去均值滤波是对均值滤波器的改进,它对模板S数据进行最大值校正处理,即在获得模板S中的数据后,去除最大值和最小值f(s,t)#39;),然后是均值滤波器。由于异常点的操作,过滤方法大大减少了来自真值的过滤结果的影响,而且还改变了原始数据。过滤和检测的目的不同,前者主要是对数据的去噪和平滑,后者在原始数据的前提下并未进行修改,能找出数据中的异常点。因此,根据公式(5)给出以下规则:
∣∆f(x,y) ∣gt;2std(f(s,t)rsquo;) (6)
得到:
∆f(x,y)=f(x,y)-mean(f(s,t)rsquo;) (7)
其中f(s,t)rsquo;是删除模板中数据的最大值和最小值的其他数据。 如果公式(6)成立,则(x,y)点是异常点。 删除异常值后,获得的定位误差值如图4所示。
图4引入多径效应的均值滤波算法修改后的定位误差图
3真实信号测试(测量机构参考天线坐标值作为标准点)
图5仅通过GNSS获得的共享单车的位置分布
这是21个实际信号定位的测试数据,水平定位误差lt;8m,但没有引入逻辑边界算法和奇异值消除算法。 因此,共享单车的位置坐标是相对离散的。 当计算其重心坐标时,它不在虚拟围栏内,如图4所示。 也就是说,智能管理共享单车是没有实现的。通过奇异值消除算法和定位误差平滑计算得到的初值数据,如图5所示。 尽管大多数共享单车的位置坐标可以达到,并且虚拟围栏内重心坐标的比率高达60%,但高精度的位置管理网络仍无法实现。
图6奇异值排除算法处理后的共享单车位置分布
在这种情况下,有必要进一步优化管理模式,然后引入CEP误差分析方法。 它可以让共享单车的位置管理成为现实,共享单车的重心坐标位于虚拟电子围栏内,其概率超过90%。
图7改进的定位算法测试结果
结论和未来的工作
在此应用中,我们提出了基于北斗的高精度虚拟电子围栏管理技术。 模拟环境测量和实际测试表明,该技术可以有效实现共享单车的停车规范管理和智能部署,并优化资源配置。目前,大的定位误差异常首次出现在2次。 我们分析了有效的定位,这可能与定位终端的工作模式和数据传输模式有关,我们建议共享单车公司通过异常过滤或增加剔除算法来处理报告的数据,同时我们也在考虑开发应用于所有共享过滤的算法,用于实现异常循环自适应。
致谢
这项工作部分得到中国国家重点科学研究计划项目资助,编号:2017YFF0210800,北京市科技项目批准号:Z161100003016002。
参考文献
[1] Morris B T,Trivedi M M.基于视觉的轨迹学习和监测分析综述[M]. IEEE出版社,2008年.
[2] Demaio P.共享单车:历史,影响,供给模式和未来[J].公共交通杂志,2014,12(4).
[3] Bishophurley G J,Swaim D L,Anderson D M,等人.虚拟围栏应用:实现和测试自动化牛控制的系统[J].电脑与电子农业,2007,56(1):14-22.
[4] Hagemann N,Schorer J,Cantilde;albrulandR7,等人.击剑视觉:击球手的眼球运动代表了他们的信息拾取吗?[J].注意力感知与心理物理学,2010,72(8):2204-14.
[5] Umstat
全文共6682字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15565],资料为PDF文档或Word文档,PDF文档可免费转换为Word

