
英语原文共 8 页
细胞图像分析:算法、系统和应用
Takeo Kanade, Zhaozheng Yin, Ryoma Bise, Seungil Huh, Sungeun Eom, Michael F. Sandbothe1and Mei Chen
Carnegie Mellon University, Intel Labs Pittsburgh
摘要
我们提出了几种细胞图像分析算法,包括显微图像恢复、细胞事件检测和细胞跟踪。这些算法被集成到能够实时量化体外细胞增殖指标的自动化系统中。这为生物应用提供了独特的机会,例如响应不同细胞培养条件的高效细胞行为发现和适应性实验控制。我们定量评估了我们的系统在16个显微图像序列上的性能,满足了生物学家的要求。我们还开发了一个与系统本地用户界面兼容的公共网站,从而让生物学家可以方便地在线检查他们的实验进展。该网站将作为一个社区资源,允许其他研究小组上传他们的细胞图像进行分析和比较。
1.介绍
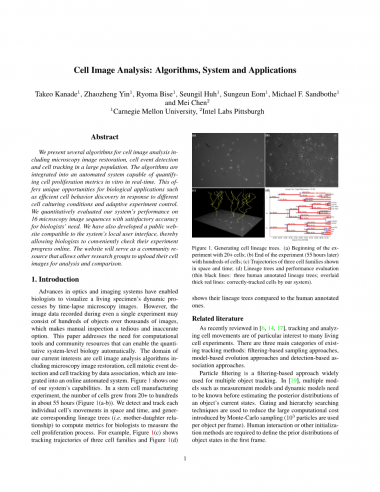
光学和成像系统的进步使得生物学家能够通过延时显微图像来观察活体样本的动态过程。然而,即使在单个实验中记录的图像数据也可能由数以千计的图像中的数百个对象组成,这使得手动检查变得乏味且不准确。本文论述了对计算工具和社区资源的需求,这些资源能够自动实现定量系统级生物学。我们目前感兴趣的领域是细胞图像分析算法,包括显微图像恢复、细胞有丝分裂事件检测和通过数据关联的细胞跟踪,它们被集成到在线自动化系统中。图1显示了我们系统的一个功能。在干细胞制造实验中,细胞数量在大约55小时内从20 增加到数百(图1(a-b))。我们检测和跟踪每个细胞在空间和时间上的运动,并生成相应的谱系树(即母女关系)来计算生物学家测量细胞增殖过程的指标。例如,图1(c)显示了三个细胞家族的跟踪轨迹,图1(d)
图1.生成细胞谱系树。(a)开始20多个细胞的实验(b)数百个细胞的实验(55小时后)结束(c)空间和时间上显示的三个细胞家族的轨迹(d)谱系树和绩效评估(细黑线:三个人类注释谱系树;重叠的粗红线:我们系统正确跟踪的细胞)
与人类注释的谱系树相比,显示了它们的谱系树。
相关文献
正如最近在[6,14,17]中所回顾的,跟踪和分析细胞运动对许多活细胞实验特别有意义。现有的跟踪方法有三大类:基于滤波的采样方法、基于模型的进化方法和基于检测的关联方法。
粒子滤波是一种基于滤波的方法,广泛用于多目标跟踪。在[19],在估计物体当前状态的后验分布之前,需要知道多个模型,例如测量模型和动态模型。门控和层次搜索技术用于减少蒙特卡罗采样带来的巨大计算成本(每帧每个对象使用10篇文章)。需要人工交互或其他初始化方法来定义第一帧中对象状态的先前分布。
基于模型跟踪的思想是为每个要跟踪的对象创建和更新一个模型。例如,开发了一种耦合均值漂移算法来跟踪相差显微镜图像[4]中的迁移细胞,其中要求操作者选择要跟踪的细胞,并且在开始时初始化物体外观模型。然后对预处理图像(阈值化、均衡化和掩蔽图像)执行均值偏移算法。如果用于定义多个均值漂移核的单元形状是已知的,并且单元在连续帧之间移动相对缓慢,则该方法工作良好。基于模型的方法的另一个操作是广泛研究的活动轮廓方法([5)和其中的参考文献)。虽然活动轮廓方法很好地处理单元形状变形,并且使用前一帧的对象轮廓作为当前帧中的初始化,但是如果对象在帧之间显示大位移或者发生新的对象出现事件,通常需要重新初始化。
基于检测的关联方法的策略是首先分割和定位对象,然后将这些对象/轨迹(短的精确对象轨迹)关联在帧[6,14]中。在以前的细胞跟踪系统中使用的一些流行的分割方法包括强度阈值[1)、梯度(边缘)检测[7)、形态学操作[8]和分水岭算法[20]。然而,由于强度变化、图像噪声和来自光学系统的伪影(例如,相差显微镜图像中的晕圈),强度阈值通常容易出错。边缘检测比阈值检测更健壮,但是它在低对比度图像或平坦单元区域上不能很好地工作。形态学操作仅提供粗略分割,分水岭方法通常会受到图像噪声的影响,并倾向于过度分割图像。
有丝分裂或细胞分裂是细胞跟踪系统中我们应该考虑的一个重要现象。有丝分裂期间的一系列独特变化(例如对象外观和形状的变化)阻碍了基于模型的跟踪方法。事实上,有丝分裂事件的准确检测有利于逐帧或逐轨迹关联。最近,已经提出了几种独立于跟踪结果的有丝分裂事件检测算法Li et al等人[9]在体积哈尔样特征上采用级联阿达波斯算法来检测有丝分裂事件。基于滑动窗口方案的穷举搜索被认为是昂贵的,并且体积类似哈尔的特征不擅长捕捉长期时间动态Liu et al等人[12]应用隐藏条件随机域(HCRF)模型检测含有有丝分裂的斑块序列。这项工作没有提供有丝分裂何时完成和子细胞何时出生的信息,这表明母细胞的轨迹何时分裂为子细胞的两个轨迹。此外,由于预处理步骤,整体方法在计算上很昂贵。
基于检测到的候选单元,应用线性规划[1,8]和最小成本流[15]来匹配跨帧的对象。只有在每帧中准确检测到对象时,逐帧关联方法才能很好地工作。然而,细胞经常相互接触并部分重叠,形成一个细胞簇,中间边界模糊。这种聚类在上述关联方法中造成困难,经常导致细胞轨迹的丢失和细胞身份的混淆。
我们的工作
为了解决前面方法的缺点,我们引入了三种集成到在线自动化系统中的细胞图像分析算法:
1.提出了一种基于特定显微成像模型的显微图像恢复和分割方法。提出了一种具有稀疏性和平滑性正则化的二次优化函数来恢复无晕圈和阴影等伪影的“真实”显微图像。去除伪影后,只需对重新存储的图像进行阈值处理,就可以实现高质量分割。
2.我们提出了有丝分裂检测的三步方法:候选补片序列构建、特征提取、有丝分裂发生的识别和出生事件的定位(两个子细胞首次出现的时间和位置以及它们之间的边界清晰显示)。在第一步中,搜索空间从整个视频卷缩减到小尺寸候选补丁序列。在第二步中,基于显微镜细胞图像的特征从每个候选片提取视觉特征。在最后一步,我们确定每个候选面片序列是否包含出生事件,并检测所有出生事件的空间和时间位置。
3.基于分割和有丝分裂检测结果,提出了一种细胞-斑点关联方法,该方法能够容忍缺失细胞检测、细胞重叠和分裂。跟踪系统由分割算法自动初始化,可以处理进入或离开视场的物体。
2.我们的系统概述
图2显示了集成系统的概述。研究人员可以将细胞图像从他们的数据库上传到我们的文件服务器,实时捕捉活细胞的显微图像并上传,或者检索图像分析结果来检查他们的实验进展。一旦显微图像被上传到文件服务器,计算处理器并行运行细胞图像分析算法,以处理图像并将结果输出到文件服务器。文件服务器存储所有图像文件和处理结果(分割掩码、有丝分裂检测、跟踪轨迹和细胞计数),可以在本地图形用户界面或通过我们的网站查看。
图2 .我们的系统概述
我们的系统支持在线生物实验,并且我们已经在世界范围内成功地进行了测试。生物学家开始在海外实验室培养细胞后,显微成像系统会定期捕获图像并上传到我们的文件服务器。我们的系统对图像进行实时处理,并为生物信息学提供相应的度量标准,用于自适应实验控制。生物学家可以方便地检查他们的实验进展(例如,通过一个连接互联网的移动设备),而不必在实验室里等上几个小时。
3.算法和性能评估
在这一部分中,我们首先描述了集成系统中的三种细胞图像分析算法,然后对系统的性能进行了定量评估。
3.1.显微图像恢复
基于检测的跟踪方法(即先检测后跟踪)的原理,从背景中分割目标是跟踪系统的基础。图3(a)显示了典型的相衬图像,其中细胞被明亮的晕圈包围,一些细胞结构(例如细胞核和细胞膜)由多个暗区域组成,膜内的细胞流体具有与背景相似的强度。这对传统的图像分割技术提出了许多挑战。相反,我们通过考虑显微图像形成过程的独特特征来解决分割问题,例如相衬图像的晕圈伪影。使用最近发现的显微成像模型[21],我们建立了正则化二次成本函数来恢复无伪影显微图像:
其中f是要恢复的矢量化图像,使得背景像素具有一致的零值和前景
像素具有正值,基于该正值,简单的阈值化方法可以很好地用于分割任务。h是来自[21的矩阵格式的成像模型,g是矢量化的观察图像。方程中的第一个正则项。1是空间平滑度,其中L是定义相邻像素之间空间强度相似性的拉普拉斯矩阵,例如在[11]中使用的像素。第二个是l1稀疏项,其中lambda;s是惩罚大f值的对角矩阵。最后一个正则项是保持连续图像之间的时间一致性,其中lambda;t是定义时间域中相邻像素之间强度相似性的对角矩阵,ft是前一帧中重新存储的图像。通过网格搜索从训练图像中学习三个正则项(omega;l、omega;s和omega;t)的最优权重。
使用非负更新方案,正则化目标函数可以被最小化[18]。图3(b)显示了恢复的图像,其中简单的阈值方法足以将单元像素与背景像素分开。
另一种普遍的显微成像技术——差分干涉对比度(Differential Interference Contrast,DIC),显示了一种伪三维阴影效果,细胞强度与背景像素非常相似,如图3(c)所示。同样,基于驾驶员信息中心成像模型[10],我们可以恢复有利于阈值处理的图像(图3(d))。
3.2.有丝分裂检测
我们提出了一个三步有丝分裂检测方法:补丁序列构建、特征提取和出生事件定位。我们基于强度变化来检测候选贴片序列,因为细胞在有丝分裂过程中通常表现出增强的亮度(图4(a))。更具体地,在使用阈值和卷积检测每个图像中的小的亮矩形区域之后,重叠区域被组合成一个面片。然后,跨连续帧的空间重叠的补丁被收集到候选补丁序列中。
图3 .显微图像复原。(a,b):投入和恢复
相位对比图像;(c,d):输入并恢复驾驶员信息中心图像
然而,我们自1990年以来就固定了规模显微镜镜头和细胞之间的距离几乎是一致的。此外,为了获得相似的特征,不管细胞的方向如何,我们复制补片序列在训练集中通过旋转序列中的所有补丁沿着几个不同的方向。这种旋转不变性与原始的长轴SIFT旋转不变性方案相比,该方案显示了更可靠的结果。在前两步之后,我们将决定每一步候选补丁序列包含一个出生事件位于哪个帧。第一个决定是任务,我们采用HCRF模式[16]。HCRF模型有一个优点在于它可以在补丁中模拟时间动态包含不同数量补丁的序列。为了第二个决策任务,我们训练了一个输出概率的支向量机(SVM)版本。对于培训,包含手动注释的出生事件的补丁被用作阳性样品,并且在不包含有丝分裂的贴片序列中的其他贴片是阴性样品。对于确定包括有丝分裂的每个贴片序列事件中,应用了SVM和最高的修补程序概率被决定包含一个出生事件。图4(b)显示了两个细胞的有丝分裂检测结果(黄色环)我们的有丝分裂检测算法。细胞分支通过在下面的关联方法中应用出生事件信息,轨迹被很好地联系起来。
图4 .有丝分裂检测。(a)显示有丝分裂过程中细胞外观变化的贴片序列;(b)有丝分裂检测用于基于关联的跟踪模块(黄色环:在树分叉、红绿树周围检测到有丝分裂事件:在时空空间观察到两个跟踪良好的细胞家族)
3.3.通过关联进行细胞跟踪
图像分割算法从输入图像中分割斑点,斑点可以是单个细胞或细胞群(重叠细胞),有丝分裂检测算法显示一个细胞分裂成两个细胞的位置和时间的出生事件。基于这两种算法的输出,我们开发了一种单元-斑点对应算法,用于执行前一帧中的单元和当前帧中分割的斑点之间的数据关联。具体而言,关联算法针对所有可能的小区动作做出以下具有相应可能性的假设(图5(a)):
(1)一对一假设:细胞迁移到新的位置;
其中ci表示前一帧中的ith单元格,bj表示当前帧中的jth blob。f( )计算对象的特征向量,其中可以包含不同类型的特征,如外观直方图、形状和运动历史。sigma;是调整分布的自由参数。一对一假设p1→1(ci,bj)的可能性是基于两个特征向量之间的距离来计算的。我们应用门控区域来减小一对一假设集的大小,使得单元ci仅在其局部区域周围寻找其对应的斑点。当当前帧中没有邻近的斑点时(缺失检测情况),单元ci将在接下来的几个帧中(即,在滑动时间窗口内)搜索其对应的斑点。
(2)一对一假设:一个细胞从视野中退出;
其中d(ci)计算cen-之间的空间距离
单元格ci的troid和图像边界。lambda;是调整分布的自由参数。只有图像边界附近的单元具有一对一(退出)假设。
(3)一对一假设:一个斑点进入视野;
类似于一对一的假设,只有靠近年龄边界的斑点才有一对一的假设。
(4)一对一:一个细胞分成两个细胞:
只有出生事件时空位置附近的细胞才有一对一(有丝分裂)假设。为了处理缺失的斑点检测或不准确的出生事件检测,我们在检测到的有丝分裂期周围使用滑动时间窗,即母细胞在几个后续帧内寻找其两个子斑点。为了计算两个分离斑点f(bj1,bj2)的特征向量,我们将bj1和bj2彼此相向平移,直到它们重叠,然后在联合斑点上扩展特征向量。
(5)多对一:多个单元重叠:
当在前一帧中几个单元彼此靠近并且在当前帧中检测到附近的大斑点时,这些单元具有多对一假设。我们移动多个单元以形成一个联合单元来提取特征向量。当跟踪后续帧中的重叠斑点时,我们应用轮廓匹配方法[2]将其分离成其成员单元,从而保持单元身份。图5(b)示出了跟踪具有多(单元)对一(斑点)假设的重叠单元的例子,其中多个单元部分重叠,并且所得聚类的斑点轮廓由它的成员单元的部分轮廓组成。
在计算了N1细胞和N2斑点上所有M个假设的似然性后,我们得到了M times; 1似然向量p,并提出了以下优化问题
其中x是M times; 1双元载体,xk = 1表示在全局最优解中选择kth假设。c是一个M times; (N1 N2)矩阵,每行表示假设中涉及哪些对象标识。约束CT

