英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
在智能移动设备上集成室内外图书导航地图
摘要:基于webGIS的导航服务发展迅速。但目前的研究仅是分别基于室外环境和室内环境的,没有将它们整合在一起。针对这一问题,本文提出了一种利用谷歌地图api将室内室外地图集成在一起的方法,并讨论了基于集成地图的导航服务。本文以一个图书馆图书导航系统为例进行实现。
导航应用程序运行在用户的智能移动设备上,可以通过GPS或WiFi获取设备的位置。与现有的图书检索系统相比,它节省了用户寻找图书的时间,因为图书的查询结果会显示在地图上。从用户所在位置到图书所在位置的路径会被计算出来并在地图上显示,帮助用户更快地找到图书。
关键词:webGIS;导航服务;谷歌地图API;智能移动设备;图书搜索;
一、介绍
地理信息系统已广泛应用于各类领域。
在各种类型的GIS中,WebGIS是发展、应用最广泛的一种分支。过去的十年里,它伴随着网络技术快速发展。随着web 2.0的发展,集成地图信息和其他信息的应用得到了快速发展,移动设备上的导航服务也为移动设备的移动性和便携性提供了广泛的应用。如今,许多公司都提供地图服务,但目前的这些服务只提供户外地图,导航服务也仅基于室外环境。目前对导航服务的研究主要基于室外环境或室内环境,没有将室内外导航服务整合在一起。
针对上述问题,本文提出了一种基于谷歌地图api的室内外地图集成方法。用户可以使用javaScript将谷歌地图嵌入到他们的网页中。此外,本文还讨论了基于集成地图的导航服务,实现了一种基于智能GPS移动设备的图书馆导航服务。与现在的图书馆相比,这种服务在找书功能上很省时。图书查询结果和计算出的路径会在地图上显示,帮助用户更快地找到图书。
本文的其余部分组织如下:第2节介绍了背景和相关工作。第3节说明了地图管理。第4节解释了基于集成地图的导航方法。第5节给出了系统的实现并给出了实验结果,最后是结语。
二、背景和相关工作
A.WebGIS
web地理信息系统的实现有两种方式,一种是在服务器端,另一种是在客户端[1]。在服务器端结构中,所有逻辑计算都在web服务器上完成。这让它具有较强的大规模计算能力。服务器端模型的缺点是对服务器配置要求高,服务器负载大,降低了响应速度。在客户端结构中,大部分操作都是在客户端完成的,也被称为“富互联网应用(RIA)”。服务器只做一些简单的计算并将数据返回给客户机,客户端分析地理信息并向用户显示结果。该模式采用Java Applet和ActiveX技术,会减轻网络的负载和服务器与客户机之间的平衡计算。该模式的缺点是对客户端配置要求较高,对分析大型地理数据有一定的局限性。
B.谷歌地图
谷歌地图服务是webGIS的发展。与其他web地图相比,它在地图操作、空间数据分析和开发成本方面有很大的优势[2]。
谷歌推出的谷歌地图API是基于谷歌地图的三种地图模式的应用程序接口。它可以通过JavaScript实现,允许用户将谷歌地图嵌入到自己的网页中。它要求用户申请密钥,密钥根据申请人的IP地址设置。谷歌映射api按功能可分为两部分。一个用于地图表示。另一个是map函数的扩展。
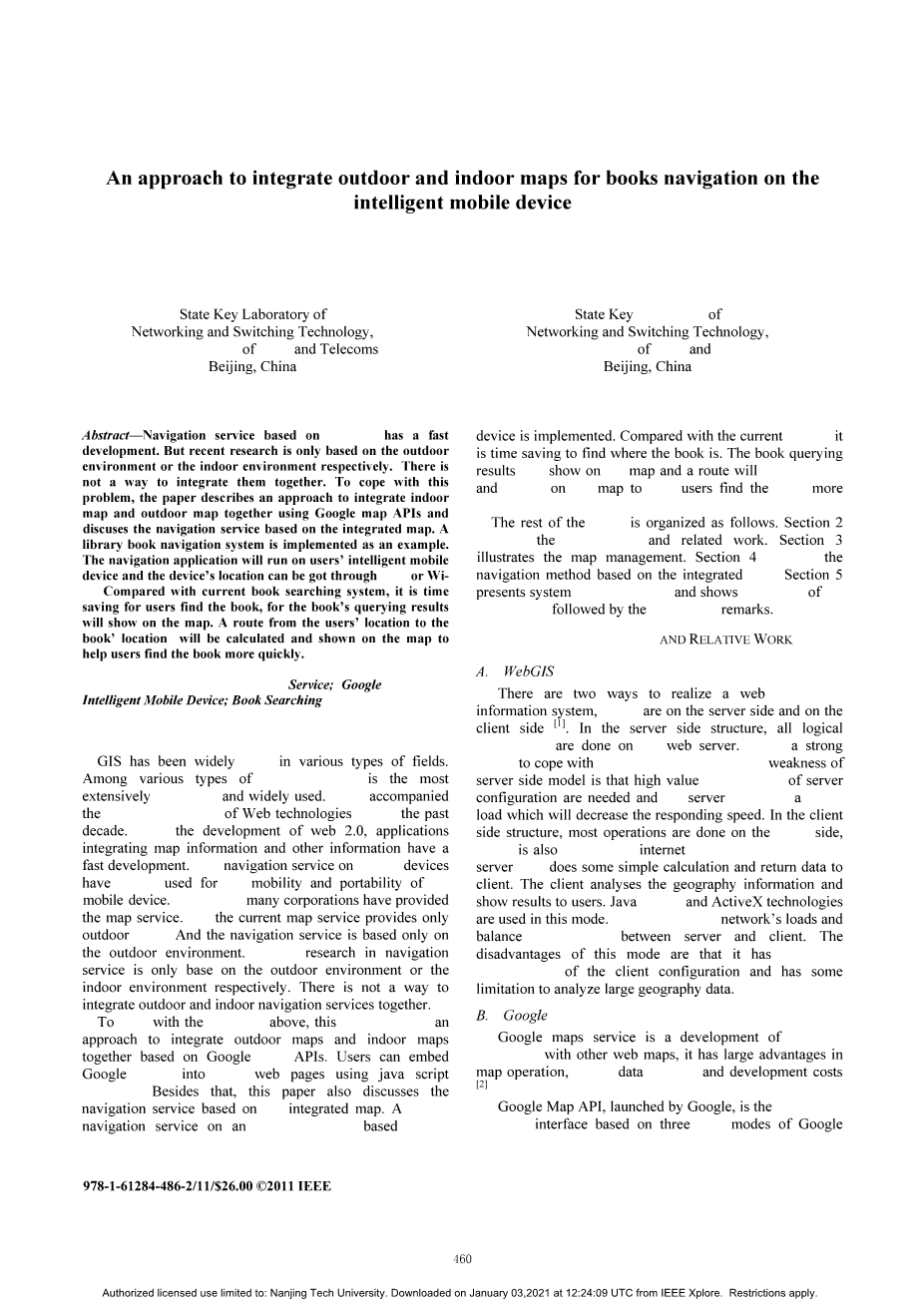
谷歌地图模型使用墨卡托投影。地图瓦片按金字塔结构组织,所有的地图瓦片都是预先制作并存储在服务器上,每个瓦片的大小是256*256像素。瓦片可以通过网址“http://mt3.google.cn/vt/v=w2.11 9amp;hl=zhCNamp;gl=cnamp;x=I726391amp;y=794209amp;z=21”获得。在URL中,x和y表示切片的坐标,参数z代表一个变焦因子。当放大地图时,每个瓦片被放大并分成四个瓦片。图1显示了的裂变过程[3]。
图1 谷歌地图瓦片裂变样本
如果想要得到瓦片的坐标,我们应该想办法把经纬度坐标转换成瓦片坐标。传递公式如下。
用这个公式来传递坐标需要进行大量的计算。谷歌地图API提供了一个函数“fromLatLngToPixel”来将纬度和经度值转移到像素坐标。因为每个瓦片的大小是256*256像素,所以瓦片坐标就是我们得到的像素坐标除以256。
地面分辨率[5]的概念代表一个像素(像素)大小所代表的地面大小(米)。这取决于两个参数:缩放级别和纬度,缩放等级决定像素大小,而纬度决定地面距离。地面分辨率的单位为米/像素,公式为:地面分辨率= ( cos(lat*pi/180)*2*pi *6378 I 37)/(256*i',d )( mpixel)
C.移动设备导航
随着移动设备的移动性和广泛应用,智能移动设备上的导航功能应运而生。像GPS这样的传感器使得开发更多基于位置的应用成为可能。除此之外,手机几乎可以在任何地方接入网络,无处不在的连接使移动电话能够使用和产生地理信息。
有了移动设备,用户就可以确定自己所在的位置并找到前往目的地的方向。主要问题是创建一个能够在移动平台上实时处理图像流、并在相对较短的时间内给出反馈的移动信息和导航辅助[6]。对智能移动设备来说,感知环境和做出决策至关重要。
三、地图管理
A.地图
瓦片有两种,室外地图瓦片和图书馆室内地图瓦片。室外瓦片是谷歌服务器上的谷歌瓦片,室内瓦片是基于CAD图像制作的。本文介绍了北京邮电大学图书馆室内地图板的制作过程。
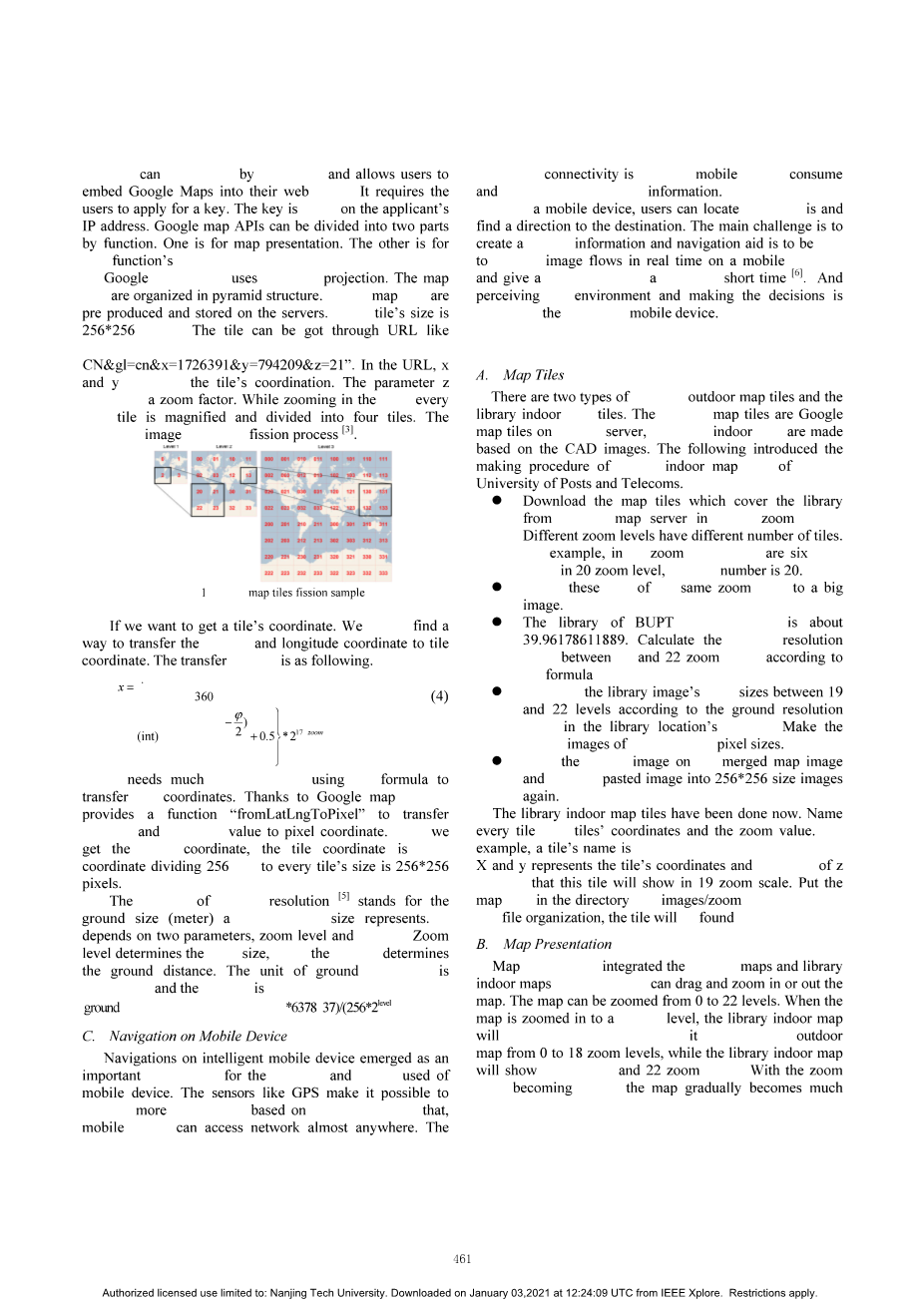
bull;从谷歌地图服务器下载19 -22缩放级别的覆盖库的地图瓦片。不同的缩放级别有不同数量的瓦片。例如,在19缩放级别中,有6个瓦片,而在20缩放级别中,瓦片的数量是20个。
bull;合并这些相同缩放级别的瓦片到一个大的图像。
bull;BUPT图书馆纬度值约为39.96178611889。根据以上公式计算19 ~ 22缩放等级的地面分辨率值。
bull;根据图书馆所在纬度的地面分辨率值,计算图书馆图像的像素大小在19到22级之间。计算图书馆图像像素大小。
bull;将图书馆图像粘贴到合并后的地图图像上,并将粘贴后的图像再次分割为256*256大小的图像。
图书馆室内地形图已经做好了。用瓦片坐标和缩放值为每个瓦片命名。例如,一个瓦片的名字是x=198554amp;y=431603amp;z=19.png。
X和y表示瓦片的坐标,z的值表示该瓦片将在19缩放比例下显示。将地图瓦片放在目录中,如图像/缩放级别/瓦片。使用这种文件组织方式,该瓦片很快就能找到。
B.地图显示
地图呈现融合了室外地图和图书馆室内地图。用户可以拖动、放大或缩小地图。地图可以从0放大到22级。当地图放大到正常水平时,会显示图书馆室内地图。具体来说,室外地图将显示0 - 18变焦等级,图书馆室内地图将显示19 - 22变焦等级。随着缩放级别的增大,地图逐渐清晰起来。
本文定义了一种新的地图类型,将室外地图和图书馆室内地图融合在一起。在谷歌map APls中有一个GMapType[7]类,它的作用是定义map类型。它的构造函数有三个参数:“layer”、“projection”和“name”。参数“layer”是一个GTileLayer类型的数组。第二个参数“projection”是一个GProjection对象。通常它是谷歌地图的投影。本文使用默认的投影“G_NORMAL_MAP”。映射类型可以通过第三个参数“name”来命名;通过定义一个新的GTilelayer实例,缩放级别扩展到22;重写了一个“getTileUrl”函数来返回瓦片的URL,瓦片的URL包含瓦片坐标和缩放级别;将URL定向到服务器上的map tiles获取模块。
地图块获取模块的功能是根据客户端的请求响应地图块。该模块位于服务器端。它首先检查瓦片是否缓存在文件目录中,如果存在,则返回瓦片,如果不存在,则向谷歌映射服务器发送http请求以获取瓦片。
谷歌地图api提供了一些默认的地图控件,如“GLargeMapControl”和“GSmaIlMapControl”。为了提高用户的体验,本文定义了一些新的地图控制按钮,如缩放按钮和拖动按钮。有一个GControl[7]类是所有控件按钮的基类。本文定义了它的子类来创建新的控件按钮,例如定义了一个子类“GZoomInControl”来在地图上创建一个缩放按钮。
而在客户端,WebKit用于打开地图表示界面。WebKit是一个开放源码的web浏览器引擎,它允许web浏览器渲染web页面。它提供了一组在windows中显示web内容的类,并实现了浏览器功能[8]。地图服务提供者会打开一个URL供访问。WebKit加载URL后,地图会显示在移动设备上。图2为北京邮电大学图书馆建设第二届f100r项目样本。
图2 北京邮电大学图书馆建设第二届f100r项目样本
四、综合地图导航
A.路径规划
路径规划包括两个方面。一种是图书馆外的路径搜索。另一种是在图书馆内进行路径搜索。
外部路径搜索可通过谷歌地图api实现。本文使用的API是GDirections [7], GDirections的构造函数有两个参数。一个是地图类型,另一个是方向面板,它总是一个div元素。首先,定义GDirections类的一个实例。然后,调用10adFrom Waypoints函数。这个函数包括一个起始点和一个结束点参数,方法中还包括一种行程方式。本文选择了G型行走方式中的步行行走方式。这些设定好后,一条路径将在谷歌地图服务器上计算,并显示在客户端地图上。
在图书馆室内环境中搜索路径,需要获取室内路径空间信息。因此,首先要建立一个室内路径信息模型。本文采用有向连通图[9]来存储路径信息。有向连接图可以描述为G = lt;V, E, Wgt; , V为顶点集合,E为边集合,W为两个顶点之间的距离。该模型符合以下几点:(1)将道路交汇点作为图的顶点,交汇点之间的道路作为图的边。权值是两个结点之间的距离。(2)假设所有道路都是双向的。例如,如果从顶点a到顶点B有一条有向边,那么从顶点B到顶点a也一定有一条有向边。并将信息存储在Sybase数据库中。最后,在BUPT图书馆中收集了224个顶点和291条边。得出了一张大的楼层间有向连接图。
在求解最短路径问题的几种算法中,Dijkstra算法是计算最短路径的代表性算法。由于图书馆空间路径信息有限,计算机计算速度也越来越快,本文采用Dijkstra算法从起点和终点计算最佳路径。
道路服务将室内道路信息封装为XML[10]格式,并将其响应给客户机。从图3的模板中可以看出,由于室内环境不止一层,路径可以分为多个部分。
图3 室内道路信息模板
每条路径都与楼层编号相连。它包含许多点,这些点是用经纬度坐标指定的。路径将由这些点的连接点绘制。
B.真实环境中的导航
在导航服务中,源说明和目的说明是两个基本元素。在图书搜索服务中,目的地是图书的位置。而源就是手机的位置。
本文将图书的位置信息添加到数据库中。众所周知,每个书架都有两面,每一面都包含许多网格,每个网格都可以用行号和列号来标识。书的位置可以指定书所在的网格。数据库中有“书架表”和“书架网格表”来存储图书的位置信息。
这本书的位置很容易指定,因为它可以描述为lt;Lat, Lon, side, row, column gt;。Lat和Lon代表书架坐标。side说明这本书属于书架的哪一边。row和column表示该书所处的网格。
与目的说明不同,源说明是移动设备的当前位置,必须由系统实时识别。在室外环境中,可以通过GPS定位。在室内环境中,设备可以捕获Wi-Fi信号,并根据捕获的Wi-Fi指纹估计其位置。移动设备的位置可以描述为lt;Lat, Lon, Floorgt;。Lat和Lon是纬度和经度值,floor表示设备在建筑物中的楼层。在室外环境中,楼层永远为一。
五、实施及效果
A.实现
实现可以描述为两个方面,服务器端和客户端。具体如图4所示。我们使用tomcat服务器提供图书查询服务和室内路径计算服务。客户端是一个智能移动设备,我们使用N900来演示我们的应用程序。客户端用于显示应用程序界面并与用户进行交互。
图4 我们的系统网络
在服务器端,实现基于MVC[11]模式。服务器上有控制器、处理器和数据库。控制器接收客户端的请求并将信息传递给处理器。然后处理器根据数据库中的信息进行逻辑操作并产生结果,然后将结果返回给控制器。控制器可以重新组织信息并将其响应给客户端。
数据库中有地图瓦片、图书信息和图书馆室内空间路径信息。在室内路径搜索服务中,控制器从请求的URL中提取起点和终点的坐标。然后将坐标传递给处理器。处理器首先将数据库中的空间路径信息组织成有向图,并根据算法计算出最佳路径。然后处理器向控制器返回一个路径节点数组。控制器将路径数据重新组织为XML格式,并将路径信息响应给客户机。在图书查询服务中,控制器将从客户机接收查询关键字,并将请求信息传递给处理器。处理器根据查询关键字从数据库中选择图书信息,并将查询结果返回
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[257234],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- GIS矢量地图的鲁棒水印方案外文翻译资料
- 中国相似地理位置发达地区房价影响因素的差异——以西安高新区和沣渭新区为例外文翻译资料
- 集成数据在城市土地利用变化时空动态监测的应用——以印度金奈都市为例外文翻译资料
- 全球地表水及其长期变化的高分辨率制图外文翻译资料
- 造成沿海大型城市内涝灾害的主要因素识别——以中国广州为例外文翻译资料
- 基于SFPHD框架的中国快速城市化地区城市生态系统健康综合评价方法外文翻译资料
- 基于绿地演变的未来城市地表热岛强度的多情景模拟预测外文翻译资料
- 中国大陆272个城市地面和冠层城市热岛强度的长期趋势外文翻译资料
- 与孟加拉湾热带气旋有关的中国低纬度高原远距离降雨事件外文翻译资料
- 新丰江水库流域GPM IMERG降水产品评价及水文效用研究外文翻译资料

