
英语原文共 16 页,剩余内容已隐藏,支付完成后下载完整资料
涡激振动和海洋隔水管的控制:综述
孔世红,奥马尔·哈米德·沙
(釜山大学,机械工程学院,韩国,釜山,46241)
摘要
本文综述了海洋隔水管系统的动力学和振动控制技术。将隔水管建模为欧拉-伯努利梁,在海洋载荷和水面船舶运动的影响下振动,得到混合的奥德-偏微分方程。首先讨论了这种混合模型的时间发展,并检查了它们的近似常微分方程模型以进行仿真。总结了隔水管系统不稳定性和疲劳分析的理论和实验技术。为了提高隔水管对海流的疲劳寿命,在隔水管表面安装了被动振动抑制装置(如:边条和扰流板)。 然而,为了解决由海浪引起的不稳定性问题,采用了利用船舶运动的主动控制技术。总之,作为未来的立管技术,我们确定了七个研究问题。
关键词:隔水管,建模,振动控制,涡激振动,疲劳,海底生产系统,石油和天然气
1.引言
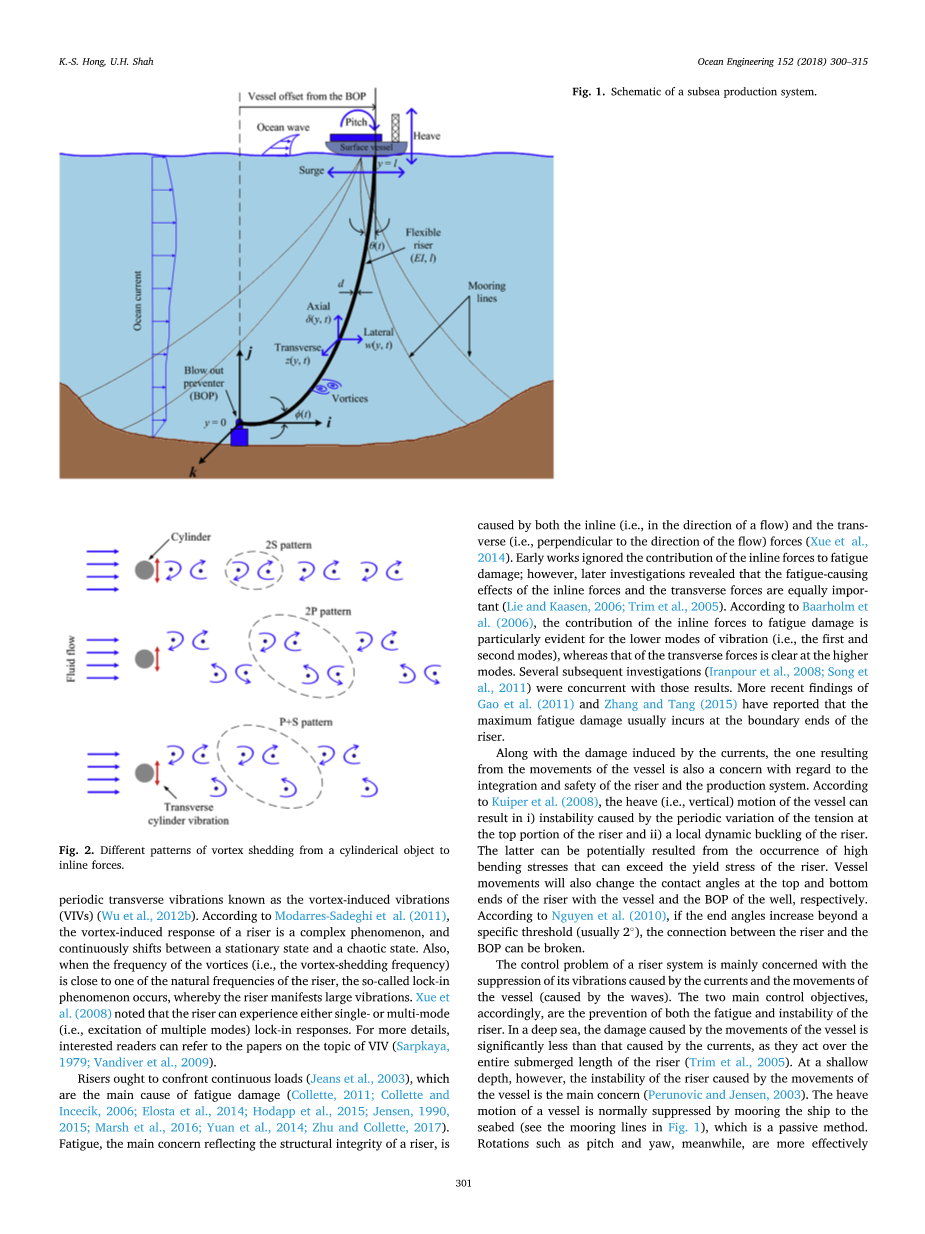
隔水管作为在海洋中漂浮的海上平台(即储油平台或船只)和海上的海底油井之间的导管(查克拉巴蒂和弗兰普顿,1982年)是海底油/气生产的重要组成部分。如图1所示,隔水管通过防喷器(BOP)阀与井相连,防止通过隔水管输送的流体泄漏。隔水管系统暴露于如海流和海浪等恶劣的环境负荷下。海流沿着隔水管的长度方向作用,然而波浪则使水面船舶运动。剧烈的海流和容器的较大运动可能导致隔水管大幅度偏转。这会导致隔水管从防喷器阀门上断裂或因为隔水管系统疲劳而失效。在过去的50年中,为了保证隔水管系统的安全性和提高隔水管系统的生产率,文献报道了对各种隔水管系统的动力学分析和振动控制的一些研究。
本文的主要目的是全面回顾海流和海浪作用下隔水管本身的动力学和控制的研究工作。隔水管的铺设和再入及其与海底的接触问题非常重要(埃洛斯塔等人,2016;詹森等人,2009a,2010;王等人,2016); 然而,由于页数限制,这些问题将不会被触及。在综述的最后,将确定改善隔水管技术未来的研究方向。本文旨在全面地描述数学建模、分析和振动控制策略的发展,以适用于目前最先进的隔水管系统。
从操作角度看,隔水管系统可以分为生产隔水管和钻井隔水管。生产隔水管将海底的石油/天然气输送到船上;钻井隔水管为钻井和运输钻井泥浆提供了通道(查克拉巴蒂,2005年;他等人,2014年)。根据隔水管的结构材料的不同,可以将隔水管进一步分为柔性隔水管和刚性隔水管。刚性或直顶张拉隔水管通常用于浅水作业,而柔性或钢制悬链隔水管通常用于深海作业(即gt;2000米) (梅卡,2001年;孟和朱,2015年)。当隔水管在有水流的情况下运动时,旋涡沿其表面脱落,从而在其周围形成不稳定的尾迹区。旋涡脱落发生在不同的频率和振幅,从而影响不同的涡型。根据徐等人(2009年)的说法,不同涡型的形成取决于入射流的雷诺数(Re)。图2显示了隔水管结构与入射流相互作用时所产生的三种不同的旋涡模式(即2S、2P和P S)。2S图是一个周期内两个相对方向相反的单个涡旋(即冯卡门旋涡脱落)的组合;2P图表示一个周期内脱落的两对旋涡,其中每对旋涡由相对方向相反的旋涡组成;P S图表示在每一个旋涡周期中一对旋涡与一个单独旋涡的不对称组合(威廉森和戈瓦汉,2004)。涡流对隔水管施加周期性变化的横向力(即垂直于流动方向),导致周期性横向振动,称为涡激振动(VIV)(吴等人,2012b)。根据莫达雷斯萨德吉等人(2011)的研究隔水的涡激响应是一个复杂的现象,并且在定态和混沌状态之间不断地转换。此外,当涡旋的频率(即涡旋脱落的频率)接近隔水管的固有频率之一时,会出现所谓的锁定现象,从而隔水管表现出较大的振动。薛等人(2008)注意到隔水管可经历单模式或多模式(即多模式激励)锁定响应。有关更多细节,感兴趣的读者可以参考关于VIV主题的论文(萨普卡亚,1979;范迪维尔等人,2009)。隔水管应承受持续荷载(杰兹等人,2003),这是疲劳损伤的主要原因(科莱特,2011;科莱特和因斯奇克,2006;埃洛斯塔等人,2014;霍达普等人,2015;詹森,1990, 2015;马什等人,2016;袁等人,2014;朱和科莱特,2017)。疲劳是反映隔水管结构完整性的主要问题,由内联力(即流向)和横向力(即垂直于流向)共同引起(薛等人,2014)。早期的研究忽略了内联力对疲劳损伤的贡献;然而,后来的研究表明,内联力和横向力的疲劳效应同样重要(列和卡森,2006;垂幕等人,2005)。根据巴勒霍姆等人(2006),对于较低的振动模式(即第一和第二模式),内联力对疲劳损伤的贡献尤其明显,而横向力在较高的振动模式下则明显模式。随后的几项调查(伊兰波尔等人,2008年;宋等人,2011年)与这些结果一致。最近的调查结果高等人(2011年)还有张和唐(2015年)报告说,最大的疲劳损伤通常发生在隔水管的边界端。
除了海流造成的损害之外,船只移动造成的损害也关系到隔水管和生产系统的一体化和安全。根据柯伊伯等人(2008年),船体垂荡(即垂直)运动可导致i)隔水管顶部张力周期性变化引起的不稳定,ii)立管的局部动态屈曲。后者可能是由可能超过隔水管屈服应力的高弯曲应力引起的。船舶移动也会改变隔水管顶端和底端分别与船舶和油井防喷器的接触角。据阮等人(2010年)说,如果端角增加超过一个特定的阈值(通常为2),隔水管和防喷器之间的连接就可能被破坏。
隔水管系统的控制问题主要是抑制由于水流和船舶运动(由波浪引起)而产生的振动。因此,两个主要的控制目标是防止隔水管的疲劳和不稳定性。在深海中,船舶运动造成的损害明显小于洋流造成的损害,因为洋流作用于整个潜水隔水管的淹没长度(垂幕等人,2005)。然而,在较浅的深度,由船舶运动引起的隔水管不稳定性是主要问题(佩鲁诺维奇和詹森,2003)。船舶的垂荡运动通常通过将船舶系泊在海床上来抑制(见图1中的系泊缆),这是一种被动方法。同时,利用推进器保持期望的船舶方向的主动控制策略更有效地抑制了俯仰和偏航等旋转(豪等人,2009)。关于疲劳预防,一个策略是设计具有较大安全系数的隔水管。莱拉等人(2005)进行可靠性分析,研究不同安全系数对控制大深度隔水管疲劳损伤的影响。关于VIV的抑制,被动装置,如扰流板(阿巴斯和摩洛斯,1996)和边条(高等人,2015a)可以安装在隔水管表面,以延长其疲劳寿命。抑制VIV的有效方法包括比例积分控制(拉斯塔德等人.,2008)、比例积分微分控制(詹森等人,2009b)、最优控制(马自利和桑切斯,2011)、边界控制(崔等人,2004;贺等人,2017;基姆等人,2005a,b;基姆和红,2009;阮和红,2010;杨等人,2004,2005a,b;张等人,2015;赵等人,2017),滑动模式控制(尼皋和红,2012a,b)和自适应控制(红,1997;红等人,2002;红和本茨曼,1994a,b)。
本文讨论了在恶劣环境条件下隔水管系统复杂响应的实验和理论研究(见第3节)。大多数实验研究已经评估了隔水管模型的响应,尽管只是在简化(如均匀流)荷载条件下。此外,模拟高紊流的实验装置的实用性也受到限制。尽管如此,一些研究报告还是对立管系统的反应提出了非常有价值的见解(见第3.2小节)。理论分析通过交替求解相关运动方程来预测隔水管的时间响应,可以得到更丰富的数据。有几项研究提出了动力学、水动力和由此产生的流体-结构相互作用的数学公式(见第2节)。这个综述包括确定隔水管响应的确定性(即在时间和频率域)和非确定性(即随机)方法(见第3.1小节)。在讨论隔水管系统动力学之后,提出了基于被动和主动策略的振动控制方法(见第4节)。在第5节中确定了以下七个研究问题:i)考虑剪力的蒂莫申科梁模型,ii)考虑水动力变化的时变参数,iii)应对极端海洋条件的6自由度船模型,iv)实时参数估计的新数值方案,v)考虑实际水动力负荷的强化实验设施,vi)结合被动阻尼装置和主动控制的混合控制技术,以及vii)防止由于船只运动而在上升管端点发生故障的控制策略。
本文的组织结构如下:第2节介绍隔水管系统的运动方程和作用于隔水管系统的水动力的数学公式。 第三部分回顾了分析隔水管系统响应的实验和理论技术。 第4节详细叙述了为抑制在恶劣海洋环境中工作的隔水管振动而开发的许多被动和主动控制策略; 最后,第5节讨论了与近海海洋隔水管动力学和控制有关的未来研究问题
2. 隔水管动力学
隔水管系统通常被模拟为欧拉-伯努利梁,在海洋中的波浪和水流以及船舶运动的影响下振动。图1示出了柔性隔水管系统的示意图,其中d是直径,EI是弯曲刚度,l是长度,u(x,t)为横向挠度,w(x,t)为横向挠度,delta;(x,t)是隔水管在x和时间t处立管的轴向挠度。如图所示,隔水管的底端和顶端分别用销连接到海底防喷器和水面船舶上,其中,ϕ(t)和theta;(t)分别是隔水管的底角和顶角。船舶被认为经历了三种运动:垂荡、纵荡和纵摇(即在垂直双向平面上的运动),这三种运动主要是由波浪和风引起的。如图1所示,为限制此类移动,可将船舶系泊在海床上。与此同时,沿立管长度方向运动的洋流是导致立管中出现过渡流的主要原因。
在下面的小节中,各种数学公式综述了立管在不同水动力作用下的响应。为了一致性和便于比较,文献中出现的符号被统一起来。另外,关于t和x的导数用表示分别用.和'表示。
2.1. 横向振动
黄和德瑞尔(1968)被认为是第一个推导立管系统运动方程的工作的人。为了分析柔性钻井隔水管的横向动力学(即仅在îĵ平面内的运动,其中海流流动),建立了以下偏微分方程(PDE)。
EIu(x,t)-((mr -mi)gx-Fv)u(x,t)(mr -mi)gu(x,t) m(x,t)= 0
(1)
式中,mr和mi分别表示隔水管单位长度的质量和在隔水管内流动的钻井液质量,g为重力加速度,m为隔水管单位长度的总质量(包括钻井液和随管道移动的外部流体的质量),Fv是作用在立管底部的垂直推力(由于钻井)。在式(1)中,洋流和海浪对海洋的影响没有考虑到隔水管的动力学。然而,这肯定会导致一个更详细的公式之间的相互作用隔水管和周围的流体。
沿ĵ轴作用的内联水动力FI(x,t)为由以下非线性莫里森方程建模(莫里森等人,1950)。
FI(x,t)= Fm(x,t) Fd(x,t)
=(pi;/4)rho;wd2 Cm(x)y(x,t) (1/2)rho;wdCd(x)(vy(x,t--(x,t))|vy(x,t--(x,t)|, (2)
其中Fm(x,t)和Fd(x,t)表示惯性力和阻力,rho;w表示水的密度,vy(x,t)表示水平水颗粒速度,Cm为惯性系数,Cd表示阻力系数。杨等人(1978)建立了以下方程,以分析隔水管在内联水动力FI作用下的横向振动。
EIu(x,t)-(T(x) gamma;iAi-gamma;oAo)u(x,t)-(T(x) poAo-piAi)u(x,t) m(x,t)= FI(x,t) (3)
式中T表示实际立管张力,A表示立管面积,gamma;表示比重,p表示流体压力,下标i和o分别表示立管内外所考虑的量的性质。在式(3)中,可选择地提出式(2)中阻力的简化形式,假设阻力是由恒定流速v引起的。然后,按以下形式获得阻力。
Fd=(1/2)rho;w dCdv|v| (4)
后来,萨尔普卡亚和艾萨克森(1981)用线性表达式代替等式(2)中阻力的二次项(即,(vy-)| vy-|)包括隔水管和入射流之间的相对速度的均方根值sigma;v,得到以下线性公式。
Fd(x,t)=(pi;/4)rho;wd2 Cm(x)y(x,t) (1/2)rho;wdCd(x)sigma;v(vy(x,t)-(x,t)) (5)
克拉巴尔蒂和弗兰普顿
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[240140],资料为PDF文档或Word文档,PDF文档可免费转换为Word

