英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
基于仿真的高速公路工作区车道信号合流控制系统研究
摘要:本文提出了在高速公路工作区利用新型车道信号合流(LBSM)控制系统。该系统应用信号控制概念,逐车道对通过工作区的车辆进行调节,为最大限度地提高运行效率和安全性提供了有效途径。与该LBSM控制相关的初步配置和主要组件的介绍是本研究的核心。为了评价所建系统的有效性,本研究还根据真实工作区数据校准的高速公路模拟器进行了广泛的仿真实验。实验结果表明,在严重拥堵的交通条件下,LBSM在工作区通过交通量、平均车辆延迟、平均停车延迟和平均停车次数方面优于所有现有的控制策略。本研究还调查了可能影响此类系统性能的关键流量相关因素。
一、引言
在高速公路路工作区段的施工活动是造成非经常性拥堵的主要原因之一,它可能会对交通流动性和安全性产生重大影响,因为车道关闭导致的容量降低通常会导致驾驶员进行强制性的车道改变和合流操作。为了最好地管理接近和穿越工作区域的交通,交通专业人员在过去20年中提出了多种合流控制策略,包括常规合流(CM)、早期合流(EM)和后期合流(LM)。然而,如何在高流量下最大限度地提高工作区域的运营效率和安全性,仍然是一个具有挑战性的问题。
《统一交通管制设备手册》(MUTCD)(2003)中指定的CM是工作区域操作最常用的策略。EM(McCoy等人,1999年;Tarko和Venugopal 2001年)力求减少强迫合流的频率,以便产生更顺畅的流量,而LM(McCoy等人,1999年;佩斯蒂等人,1999年;Walter和Cooner,2001年;Beacher等人2004年;Kang和Chang,2006)旨在提供更大的队列存储区域,并降低驾驶员的失望水平。EM和LM都可以以静态或动态形式操作,前者是在车道关闭前的固定距离内提供提前通知,后者将根据施工区交通状况的不同,在不同的位置显示消息(McCoy 和Pesti2001年)。
文献中广泛讨论了CM、EM和LM的优用和局限性。一般来说,在轻交通条件下加强交通安全方面,《交通管理总署》似乎表现良好,而交通管理局主要可在拥挤的交通条件下提高营运效率(McCoy和Pesti,2001年;Beacher等人2004年;Kang等人2006年)。但是,在严重拥堵的情况下,EM和LM都不能在交通安全和交通方面产生预期的有效性。这是因为,复杂的合流行为和改变车道的机动性导致的不可避免的交通冲突可能会增加交通事故的可能性,并促使车流停止和移动,降低运营效率(Kang等人,2006年)。此外,司机难以识别谁在合流点拥有通行权,这可能会加剧在严重拥堵条件下的交通冲突。虽然可变限速控制(Lin等人2004年)可以通过动态调节其平均速度来减轻这些影响,但它不能直接控制车辆的合流行为和车道变换的规则。
本文探讨了一种新的合流控制策略,该策略利用合适合流点的信号为每个车道的流量分配通行权。下一节介绍了拟应用的基于车道的合流控制策略的问题性质和要求,然后简要介绍了拟议的系统配置和核心控制概念。评价所建系统有效性的仿真实验以及一些初步的研究成果分别总结为'仿真运行评价'和'结论与展望'。
二、车道信号合流控制系统
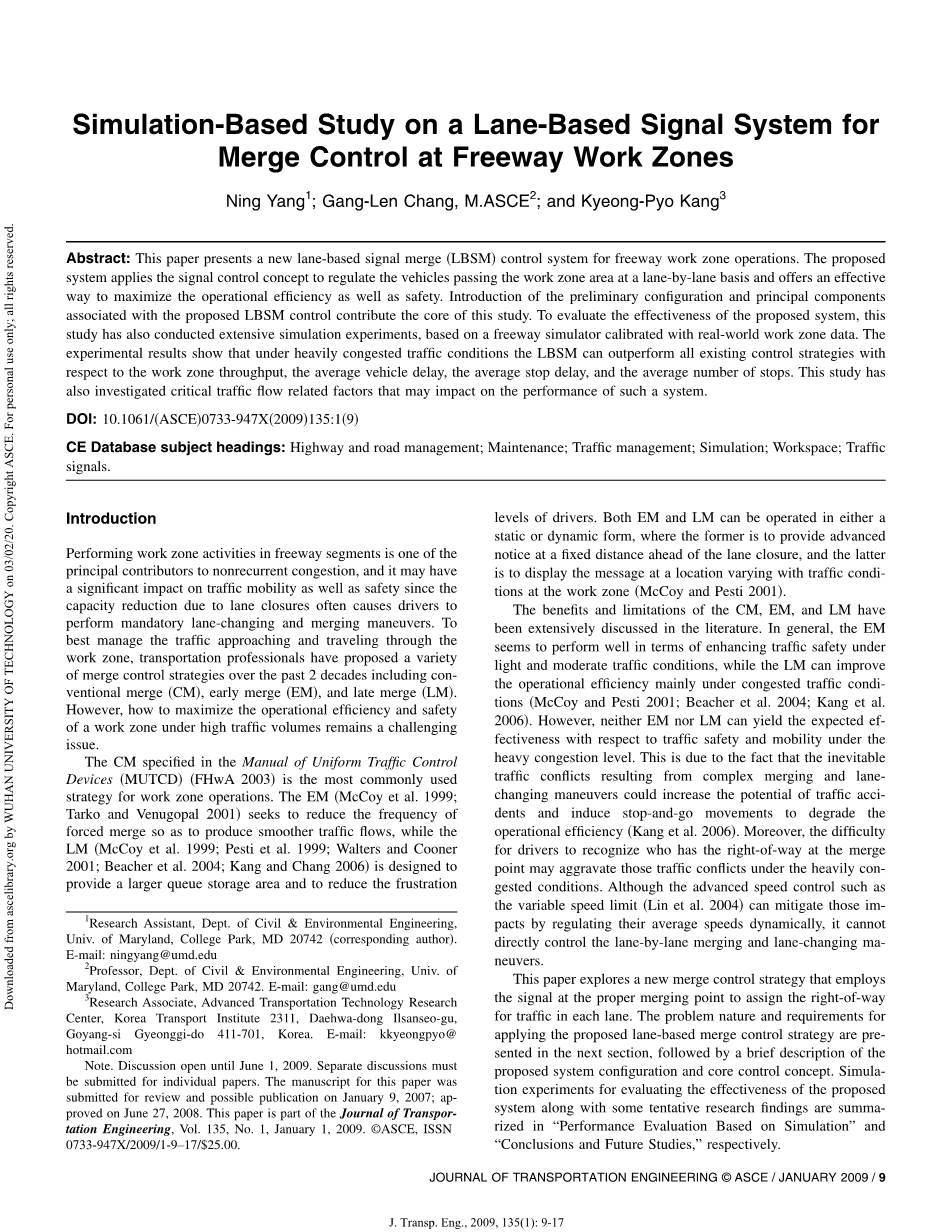
在工作区锥度附近的合流点,道路权混乱被广泛认为是导致交通排队和事故的主要原因之一,尤其是在拥挤情况下。信息板提供的'在此合流'和'请变道'不足以让驾驶员在合流过程中确保其路权,尤其是某些驾驶员具有侵略性驾驶行为时。因此,由可变消息符号(VMS)或便携式可变消息符号(PCMS)引导的合流行为可能变成不安全且效率低下的措施,进而可能导致大量容量减少。为了防止这种不良和不安全的合流操作,本研究提出了LBSM控制系统的新概念。
1.车道信号合流控制系统的概念
LBSM的基本概念是使用基于车道的信号或可变标志,使不同车道的司机有权通过工作区中的开放式车道。如图1所示,采用预置或激活信号系统的LBSM可以像交叉点信号控制一样工作。拟议的LBSM有望实现以下运营优势:
(1)充分利用开放车道容量,提高交通流动性;
(2)通过使用交通信号来提高交通安全,以防止在开车道和封闭车道之间车辆之间经常发生的交通冲突。
应该指出,拟议的LBSM系统只有在高速公路出现拥堵的情况下才应考虑,因为高速公路的交通需求已经超过了工作区容量,而且已经形成了排队。否则,在低密度高速高速公路上激活干线信号引起的交通中断可能会增加发生追尾碰撞和其他安全问题的风险。此外,红色信号引起的额外停车行为和延迟是非拥堵交通状况下所需的代价。
图1 在工作区工作的LBSM概念
2.系统配置
为了产生上述好处,拟议的LBSM系统应符合MUTCD中描述的准则。上游显示的VMS或PCMS不应与现有静态标志冲突,否则可能会使驾驶员混淆。本文将仅讨论2变1高速公路工作区实施的预定LBSM控制系统。配置和实验结果将作为将其操作扩展到多车道工作区域的基础。
3.系统组成
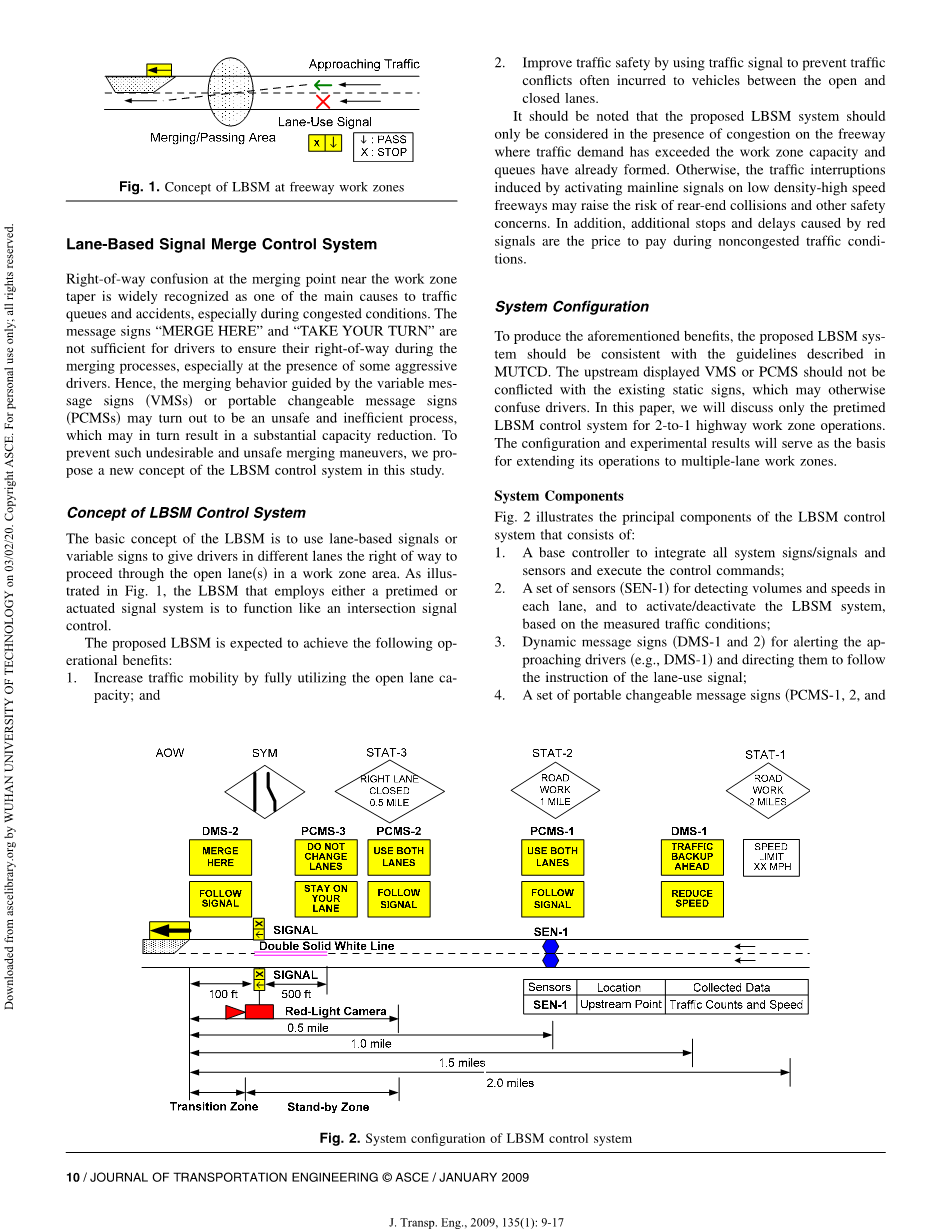
图2说明了LBSM控制系统的主要组件,包括:
(1)集成所有系统信号/信号和传感器并执行控制命令的基础控制器;
(2)一组传感器(SEN-1),用于检测每个车道的流量和速度,并根据测得的交通状况激活/停用LBSM系统;
(3)动态消息信号(DMS-1和2),用于提醒接近的驾驶员(例如DMS-1),并指示他们按照车道使用信号的指示;
(4)一套便携式可变消息标志(PCMS-1、2和3),用于通知即将推出的合流类型和车道使用说明;
(5)高架车道使用信号(SIGNAL)用于将道路权分配给开放车道和封闭车道;
(6)红灯摄像头用于提高驾驶员的遵从性;
(7)双实白线,禁止在指定距离内开车道和封闭车道之间进行车道变换操作(例如,等候区域);
(8)在开放和封闭车道上的车辆通过和/或合流到工作区区域的过渡区域(TZ);
(9)等候区用于在开放和封闭车道上的车辆,无需更改车道即可等待通行权。
在上述元素中,车道使用信号、过渡和等候区域是最关键的组件,后续部分将介绍它们的关键功能。
4.车道使用信号灯
根据车道使用信号的指示,接近的车辆应通过开放车道或停在等候区。为了有效地运行这样的系统,必须通知上游车流在工作区即将实施此控制类型。例如,系统不应显示任何车道闭合的消息,而应提前通知驾驶员信号合流控制(例如'跟踪车道使用信号','在前进信号之前停止'和'保持您的车道'/'请勿更改车道')。
对于2变1工作区域,三相显示(绿色、黄色和红色)足以指导驾驶员的合流优先级(图2)。但是,对于多车道工作区域,可能需要设计更好的设备和路面标记,以便不同车道上的司机可以清楚地知道谁拥有通行权,以及沿着哪条路安全地通过合流/通过区域。
图2 LBSM控制系统的系统配置
5.过渡区和等候区
过渡区是第一个车道合流点和车道使用信号之间的距离。其主要目的是为从封闭车道向开放车道合流的车辆提供足够的空间(图3)。请注意,过长的TZ区可能会产生多个车道更改点和合流操作。TZ区长度可以从接近车辆的平均速度和工作区域地理特征确定。在实验研究中,它被设置为100英尺。
图3 过渡区
等待区是用白线指定的无车道更改区域(图4)。请注意,长度不足的SZ区可能会导致多个合流点,从而降低LBSM的效果。相反,如果SZ区长度过长,可能会阻止车辆在车道之间平衡队列长度。SZ 最有效的距离可以从最大队列长度分析中确定。在这项研究中,我们设定了500英尺作为基线。
图4 等候区
三、仿真运行评价
为确保拟议的LBSM能够有效运行,本研究根据以前研究中研究团队在实际工作区观察交通措施时获得的现场数据(Kang等人,2006年),开发了一个仿真系统。校准良好的仿真系统作为测试台,用于我们调查LBSM相对于相关关键因素的性能的敏感性。
VISSIM 3.7是PTV开发的最精密的微仿真软件之一,是非常适合用作对高速公路工作区域控制操作进行建模的工具。
1.被测试路网的评价
这项模拟实验基于位于马里兰州的一条高速公路段,该路段位于美国I-83号公路南侧,靠近冷底路立交桥的右车道封闭工作区。它被模拟为一个单向双车道高速公路段,由三个链路组成,每个链路代表上游、工作区域和下游链路。工作区链路中的车道数将降至一个,以复制单车道封闭区域。对上游流量、卡车百分比、工作区域通过交通量和合流点的平均速度的模型校准基于研究团队2003年收集的数据。
2.实验设计
为了评估LBSM的潜在优势并研究其最佳适用的交通状况,此基于仿真的实验侧重于比较CM、静态EM、静态LM LBSM在容量范围内的性能,从500车辆/h/车道到1,500车辆/h/车道,增量为50车辆/h/车道。在所有这些测试方案中,重型车辆的百分比设置为10%,LBSM 信号的周期长度设置为60s,每个车道包括1s红色/黄色相位,3s黄色相位和27s的绿色相位。CM、EM和LM的交通管制措施基于文献回顾中确定的研究(FHwA,2003;McCoy等人,1999年;Pesti等人,1999年)。
这项研究还包括敏感性分析,以测试周期长度和重型车辆对LBSM系统有效性的百分比。基于1,000辆车的流量/h/车道和重型车辆百分比为10%,测试周期长度设置为从60至240s,增量为30。然后,该研究开始检查结果是否会随重型车辆百分比(例如,5、10、15 和 20%)而变化。表1列出了实验中检查的因素的组合。
表1 变量测试的仿真实验
|
测试因素 |
实验数量 |
测试因素值 |
|||
|---|---|---|---|---|---|
|
最小值 |
最大值 |
增量 |
基础值 |
||
|
通过量 (辆/h/车道) |
21 |
500 |
1,500 |
50 |
1,000 |
|
周期长度 (s) |
4 |
60 |
240 |
30 |
60 |
|
卡车比例 (%) |
4 |
5 |
20 |
5 |
10 |
所有方案的绩效评估都基于以下四个有效性衡量标准:(1)每小时工作区通过交通量(辆/小时);(2)每辆车(s/辆)的平均延迟时间;(3)每辆车(s/辆)平均停车延误;(4)每辆车的平均停车次数(/辆)。
每个方案都模拟了4,800s,包括初始化期为1,200s。每个MOE是10个独立模拟复制的结果的平均值,这些复制具有不同的随机数种子,用于降低任何随机仿真程序(如VISSIM)中存在的统计方差。
四、仿真模型的建立和校准
对于使用VISSIM对CM、EM和LM措施建模,我们创建了一个连接器,用于将双车道上行链路中的车道与工作区域链路中的单车道连接起来,并指定了所有进入车辆的车道选择决策,图5(a)。链路接头中的车道更改参数用于定义车辆开始更改车道以响应车道封闭警告标志的距离。对于LM,将自动完成变道合流(PTV AG 2006)。
图5 对于CM、EM、LM、LBSM的建模
为了使用VISSIM对LBSM进行建模,本研究使用两个连接器将上游段中的每个车道与工作区中的车道连接起来,图5(b)。在两个连接器中,每个接口都设置了一个交通信号。由于在一个连接器中运行的车辆无法更改为另一个连接器,因为车辆不能从一个连接器换道至另一个连接器,仿真系统可以从连接器的起点复制禁止车道更改的待机区域到信号位置。因此,在仿真模型中,LBSM的驾驶员遵守率接近100%。请注意,本阶段的研究重点是评估系统的有效性,前提是所有驾驶员都愿意在某些监控设备监控下遵循说明。
要为模型校准的仿真参数是上游链路中的上游流量、重型车辆百分比和两个驾驶行为参数(Wiedemann 99 汽车跟驰模型),车道改变行为的最小行驶距离,以及驾驶员希望保持一定速度的车速(VISSIM 3.7 用户手册 2003)。我们已经在广泛的可能值上搜索了这四个参数,直到仿真工作区域通过交通量和合流点的平均速度与在CM和LM控制下的I-83工作区站点收集的数据一致。
表2根据现场观测的交通信息,介绍了仿真工作区的校准
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[239105],资料为PDF文档或Word文档,PDF文档可免费转换为Word

