英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
一种移动机器人导航控制的灵活架构
IEEE会员Harry Chia-Hung Hsu和Alan Liu
摘要 - 为了满足新的任务要求或适应环境变化,机器人需要执行任务切换或角色切换。 当机器人被要求执行一项超出其技能的特定任务时,可能需要请求其他机器人的帮助。 为了提高灵活性,我们使用软件移动代理的概念来设计一种称为虚拟操作员多代理系统(VOMAS)的架构。 在VOMAS中,虚拟操作员(VO)和机器人代理(RA)的智能代理共同协作控制机器人完成特定任务。 每个任务都由一个VO代表,RA处理反应控制。 基于这种架构,VOMAS可以执行动态任务切换来处理任务,这些任务最初并没有给出。 为了解释我们的方法并展示动态任务切换的可行性和有效性,引入了两个案例研究,轮椅和队形控制。 此外,VOMAS可以被视为遥控机器人架构,网络负载测试表明VOMAS比直接控制需要更少的网络负载。
索引术语 - 移动机器人,多机器人系统(MRS),角色切换,软件移动代理,任务切换。
- 介绍
A
机器人根据其任务执行任务,但任务的内容可能会相应的改变
。 因此,灵活性是其中一个重要特征,研究人员试图设计高灵活性的移动机器人以满足新的任务要求。 本文的主要目标是为移动机器人设计一个灵活的架构,称为虚拟操作员多代理系统(VOMAS),以满足快速变化的任务通过动态任务切换或动态角色切换。
术语角色切换(或称为角色分配)和术语任务切换(或称为任务分配)具有相似的含义。 术语角色是从社会角度来看的,它意味着一个或多个移动机器人在多机器人系统(MRS)[1]中进行合作期间执行的功能。 当系统中只有一个机器人,或者我们只关心机器人执行什么动作时,术语任务更合适。 基于这些原因,我们使用角色切换或任务切换
手稿于2002年2月2日收到; 修订于2005年10月22日。这项工作部分得到了经济部(台湾)的资助95-EC-17-A-02-S1-029,部分由国家科学理事会(台湾)以资助95 -2752-E-008-002-PAE和Grant 94-2213-E-194-010。 本文由副主编A. Ollero推荐。
HC-H。 许先生曾在中国台湾正义大学国际中正大学电机工程系工作。他现在与台湾台北105华宝通信公司(电子邮件:harry_hsu @ compal.com)合作。
A. Liu是中华民国中正大学电机工程系Chia-Yi 621(电子邮件:aliu@ee.ccu.edu.tw)。
本白皮书中的一个或多个数字的彩色版本可在网上查阅http://ieeexplore.ieee.org。
数字对象标识符10.1109 / TSMCA.2007.893460
可互换地表达机器人在本文中执行的一系列动作。
角色转换(或任务转换)的概念是MRSs研究领域的一个重要研究课题。 在机器人足球比赛中,机器人可能扮演不同的角色,他们需要动态地进行角色切换,以提高赢得比赛的表现[2],[3]。Martinson和Arkin在角色切换中使用Q学习算法来提高合作挖掘任务的性能[4]。 一个动态角色分配被用于MRS的合作运输[1]。 ALLIANCE是一种基于行为的体系结构,结合数学建模动机来处理具有容错功能的多机器人合作的任务分配[5]。 MURDOCH根据合同网协议执行MRS的动态任务分配[6]。 一个基于市场的框架,Hoplites明确地提出了需要有计划的紧密协调的MRS任务[7]。 Gerkey和Mataric报告了MRS的任务分配的正式分析和分类[8]。
但是,机器人可以执行的角色(任务)的数量是在其软件控制体系结构中预先设计的。 如果机器人需要执行超出其功能的特定任务,则可能需要向具有该任务技能的其他机器人请求帮助。 为了提高机器人用一些特定的软件技能来满足他们所需要的任务的灵活性,我们使用软件移动代理的概念来执行任务切换。 在本文中,移动代理是一个移动软件代理,它可以通过网络从主机迁移到主机[9,10]。 有关移动代理的概述已经在[11]和[12]中报道,移动代理在网络应用中是一个流行的研究课题,例如电子交易[13],网络管理[14]等。它也用于远程控制,如虚拟实验室和远程监控[15],远程控制分布式变电站[16]等
本文的主要贡献是使用代理特别是移动代理的概念来开发一种灵活的架构VOMAS,用于能够动态任务切换的移动机器人,以支持自动生成任务而无需预先计划。 为了实现这个目标,我们在VOMAS中设计了三个代理来控制移动机器人:用户代理,虚拟操作代理和机器人代理(RA)。 用户可以通过用户代理控制移动机器人。 RA是机器人环境中的固定代理,它执行高度依赖物理平台的功能。 虚拟运营商(VO)是一个移动代理商,它负责处理高层次的计划来代表任务。 因此,当移动机器人想要执行特定任务但缺乏技能时,机器人不需要请求其他机器人的帮助。 相反,这个机器人只需要发送
向服务器请求配备有该任务的相应VO,并且该VO然后将迁移到移动机器人的上下文以执行特定任务。 此功能可以提高移动机器人任务切换的灵活性。
本文的部分安排如下。 第二部分报告了VOMAS架构。 我们展示了在第III节中使用VOMAS控制轮椅在护理环境中的案例研究,以及在第IV节中控制合作MRS以控制队形。 因为VOMAS使用移动代理来控制移动机器人,所以它也可以被看作是一种遥控机器人体系结构,我们在第五节中通过使用移动代理和遥控来测试网络负载。我们讨论VOMAS的强度并比较它与第六节中的其他体系结构一起,第七节结束本文。
- VOMAS建筑
每个移动机器人都需要一种控制方法,我们可以从两个角度分析移动机器人的控制功能:响应时间和硬件依赖性。 从响应时间的角度来看,我们可以粗略地将控制功能划分为审慎控制和反应控制。 从硬件依赖的角度来看,我们可以将功能分为硬件无关和硬件无关功能。 基于这些观察,我们设计了具有抽象层和物理层的VOMAS架构。 审慎控制和与硬件无关的功能在RA中的虚拟运营商代理和反应控制和硬件相关功能中进行设计和表示。 为了提高灵活性,我们将VO设计为移动代理,以便机器人可以通过网络从任何服务器获取VO。 另外,因为RA执行与硬件高度相关的功能,所以它被设计为固定代理,其总是驻留在机器人环境中。 基于设计,VOMAS架构是一个多代理系统[10],[17],它是一个用于机器人控制的混合架构[18],[19]。
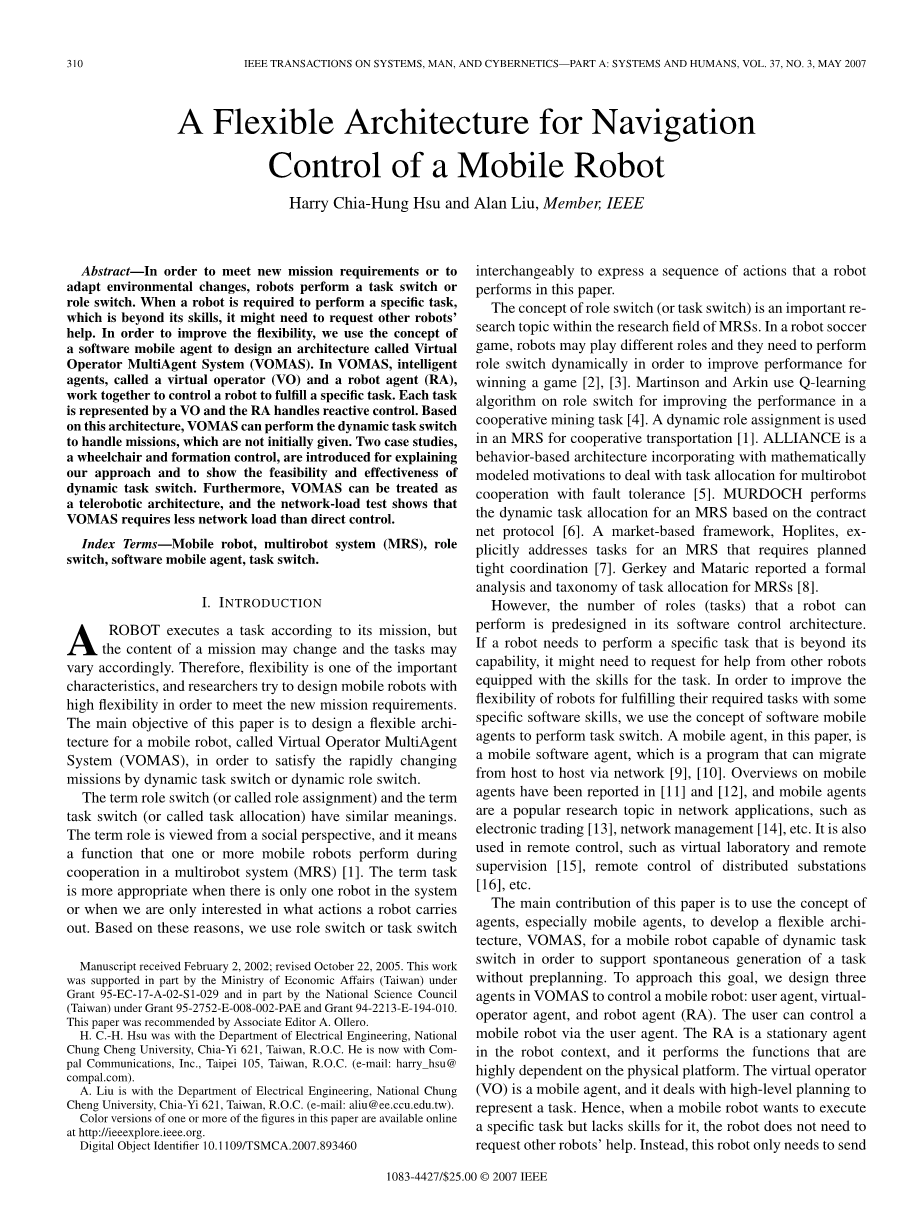
VOMAS体系结构如图1所示,我们可以看到两个上下文:用户上下文和机器人上下文,其中上下文是代理程序(如计算机或计算设备)的生存环境。 用户上下文用于用户控制移动机器人,并且机器人上下文在移动机器人上设置以控制物理设备。 另外,我们可以在架构中看到三个代理:用户代理,VO和RA。 用户代理和RA分别驻留在用户上下文和机器人上下文中。 当用户想要将任务分配给机器人时,他使用用户代理创建相应的VO,从而可以执行指定的任务。 VO是一个移动代理,因此它可以从用户上下文(如虚线矩形所示)迁移(移动)到机器人上下文中,如图1中的实线矩形所示。迁移后,VO和RA使用II-A部分中描述的协议相互配合执行指定的任务。 当一个机器人需要执行另一个任务时,机器人可以用另一个替换一个VO来执行另一个任务。 用户代理不仅可以创建VO,VO还可以创建另一个VO。 此功能使机器人能够自动将任务分配给其他机器人(详细示例将在第IV节中介绍)。
图1. VOMAS体系结构。
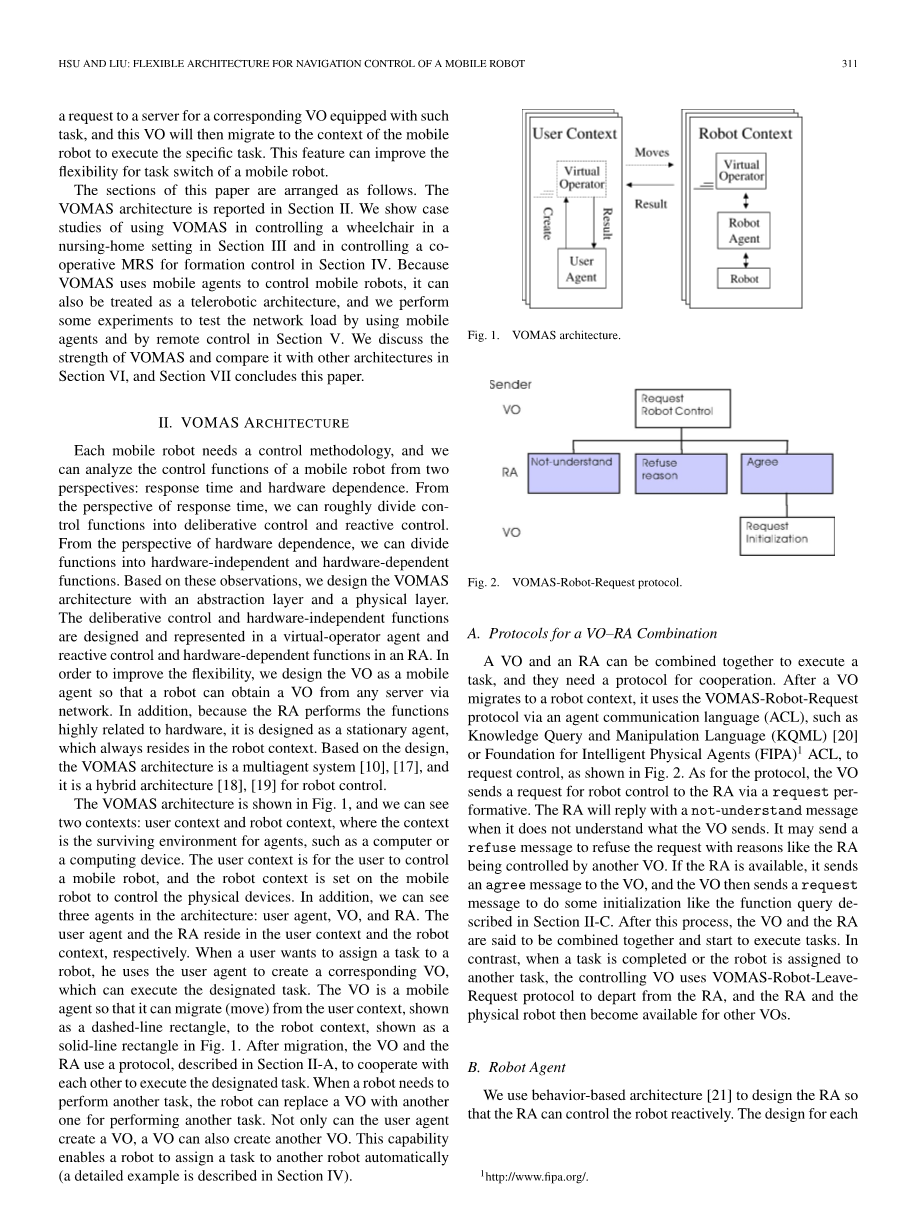
图2. VOMAS-Robot-Request协议。
A.VO-RA组合的协议
一个VO和一个RA可以结合在一起执行一个任务,并且他们需要一个合作协议。 在VO迁移到机器人上下文后,它通过代理通信语言(ACL)(如知识查询和操作语言(KQML)[20]或智能物理代理基金会(FIPA))使用VOMAS-Robot-Request协议TF28)ACL来请求控制,如图2所示。就协议而言,VO通过请求执行向机器人控制器发送机器人控制请求。 当RA不理解VO发送的内容时,RA将回复一个不明白的消息。 它可能会发送拒绝消息来拒绝请求,原因是RA由另一个VO控制。 如果RA可用,则它向VO发送同意消息,然后VO发送请求消息以执行一些初始化,如第II-C节中所述的功能查询。 在这个过程之后,VO和RA被说成是组合在一起并开始执行任务的。 相反,当任务完成或机器人分配给其他任务时,控制VO使用VOMAS-Robot-Leave-Request协议离开RA,RA和物理机器人随后可用于其他VO。
B.机器人代理
我们使用基于行为的体系结构[21]来设计RA,以便RA能够反应性地控制机器人。 每个设计
RA与物理机器人平台紧密相关,例如机器人的传感器或致动器。 我们在本文中设计了以下行为。
-
- 避障:机器人可以避免碰撞障碍物。
- 避免机器人:机器人可以避免碰撞到其他移动机器人。
- 目标寻找:机器人可以移动到其目标。
- 道路跟随:机器人可以在室内环境中跟随墙壁。
- 先行者以下:机器人可以通过其前任机器人在编队中保持编队。
在本文中,我们展示了两个具有不同RA的设计机制的案例研究。 为了满足每个案例研究的要求,在这两个案例研究中,上述不同的行为集合被各个RA使用。 我们将分别在第III-B和第IV-B节中描述RA的设计。
RA为VO提供控制机器人的功能。 RA提供的两种命令是直接命令和功能命令。 直接命令是简单动作命令,例如向前,向后,停止等。功能命令是RA为了实现特定子任务而自动执行的一系列动作。 例如,第III-B节中描述的功能命令MoveToGoal可以指导机器人实现其目标。 VO可以将其任务划分为若干子任务,并通过使用功能命令通过向RA发送相应的ACL消息来执行这些子任务。
- 虚拟运营商
VO被设计为扮演特定的角色,可以执行特定的任务。 如果机器人想要将任务更改为另一个任务,则可以通过以下步骤执行动态任务切换。 首先,当前VO使用VOMAS-Robot-Leave-Request协议离开其控制RA。 其次,创建一个新的VO并迁移到机器人的机器人环境。 第三,新创建的VO使用VOMAS-Robot-Request协议与机器人环境中的RA相结合。 在此过程之后,机器人已准备好执行新任务。
为了执行特定的任务,VO从相应的RA收集有关机器人的信息,例如传感器和执行器数据,并通过直接和功能命令通过RA控制机器人。 但是,每个RA可以基于其硬件平台功能提供不同的直接或功能命令。 为了为VO和RA提供灵活的组合,VO在VOMAS-Robot-Request协议的初始化阶段使用功能查询来查询由RA提供的包括直接和功能命令的所有命令,然后VO可以控制机器人通过这些命令。 如图所示,不同的机器人平台可能有不同的速度限制。 VO可以将自身克隆到不同平台上的多个机器人,并通过使用函数查询来控制它们,以获得每个机器人的速度限制,然后根据其相应的限制来控制机器人,通过
图3.养老院的控制架构。
为每个RA提供一个速度限制范围内的前进命令。
基于功能查询,VO可以将
全文共16035字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[12531],资料为PDF文档或Word文档,PDF文档可免费转换为Word
您可能感兴趣的文章
- 拟人手臂的轨迹规划与轨迹跟踪控制外文翻译资料
- 新型磁性辅助内窥镜系统在上消化道检查中应用的可行性 和安全性外文翻译资料
- 基于FPGA可编程逻辑器件的复合视频图像处理外文翻译资料
- 从被测的高频域原始信号中提取巴克豪森噪声外文翻译资料
- 重型机床z轴热误差混合建模方法外文翻译资料
- 一个红外浊度传感器:设计与应用外文翻译资料
- 用于控制食物烹饪过程的电子系统.外文翻译资料
- 关于液体介质中电磁流量计的设计和理论上存在的问题。第二部分:关于带电粒子产生的 噪声理论外文翻译资料
- 基于LabVIEW和Matlab的小波变换对非平稳信号的分析仿真外文翻译资料
- 应用于腹腔镜手术的新型膜式加热加湿器 的开发外文翻译资料

