英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
IFAC PapersOnLine 51-4(2018)107-112
使用基于线性动力学的自适应PI控制器 *减少步进电机应用
贾斯珀德维恩 lowast;,lowast;lowast; 米歇尔海默斯 lowast;,lowast;lowast;,lowast;lowast;lowast;
lowast;电能,金属,机械制造系
和系统,根特大学校园,比利时科特赖克
lowast;lowast;安特卫普大学Op3Mech机电系
lowast;lowast;lowast;Flanders Make的EEDT合伙人,www.eedt.ugent.be
摘要:步进电机因其低制造成本和简单的开环位置控制能力而被广泛应用。大部分广泛使用的全步进开环步进电机驱动算法以最大电流驱动,以避免步进损耗。这种非最佳控制方式导致效率低下。为了以更优化的方式使用步进电机,需要闭环控制。先前描述的仅基于电压和电流测量的无传感器负载角估计算法用于在不使用机械位置传感器的情况下提供必要的反馈。在本文中,介绍了一种自适应PI控制器,它根据估计的负载角的反馈优化电流水平。虽然电流 - 负载角度动态是高度非线性的,但是将电流降低的建立时间作为设计约束的自适应PI控制器值得考虑。特别是因为需要很少的调整参数。所描述的方法与用于驱动步进电机的流行方法互补,该方法基于步进指令脉冲。测量验证了所提出的方法。
copy;2018,IFAC(国际自动控制联合会)由Elsevier Ltd.主办。保留所有权利。
关键词:自适应鲁棒控制,PID控制应用,步进电机,无传感器电机控制,负载角,分马力机
- 介绍
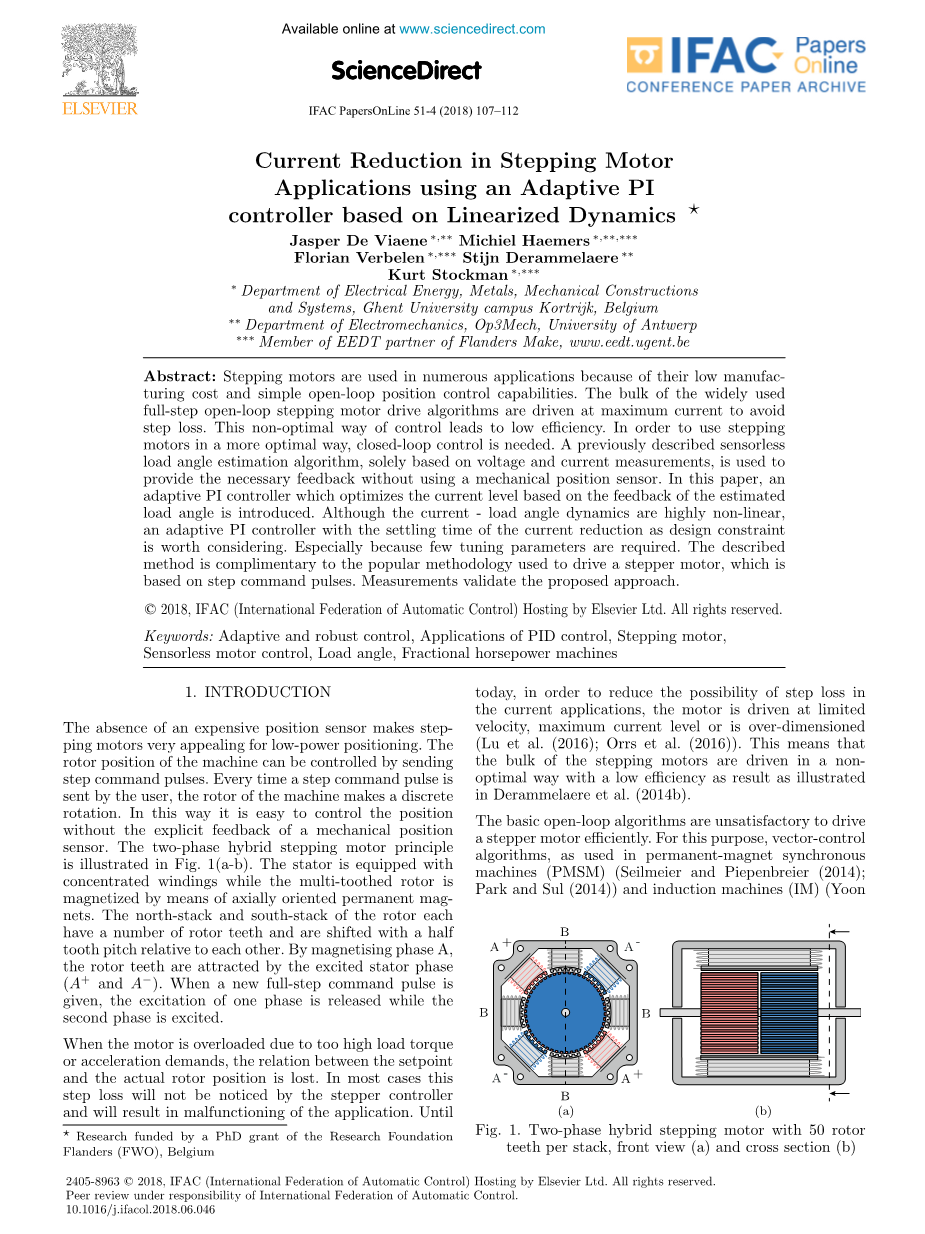
缺少昂贵的位置传感器使得步进电机非常适合低功率定位。可以通过发送步骤命令脉冲来控制机器的转子位置。每次用户发送步进指令脉冲时,机器的转子进行离散旋转。通过这种方式,可以在没有机械位置传感器的明确反馈的情况下容易地控制位置。两相混合式步进电机原理如图1(ab)所示。定子配备有集中绕组,而多齿转子通过轴向定向的永磁体磁化。转子的北叠层和南叠层各自具有多个转子齿并且相对于彼此以半齿间距移位。通过磁化A相,转子齿被激励的定子相(A 和Aminus;)吸引。当一个新的全步命令脉冲时
给定,一个相的激发在释放时释放
今天,为了降低当前应用中阶梯损耗的可能性,电机以有限的速度,最大电流水平或超尺寸驱动(Lu等人(2016); Orrs等人(2016))。这意味着大部分步进电动机以非最佳方式驱动,效率低,如Derammelaere等人所述。(2014B)。
基本的开环算法不能令人满意地有效地驱动步进电机。为此,矢量控制算法,用于永磁同步电机(PMSM)(Seilmeier和Piepenbreier(2014); Park and Sul(2014))和感应电机(IM)(Yoon)
B
A A -
第二阶段很兴奋。 B B
当电动机由于过高的负载转矩或加速要求而过载时,设定值之间的关系
并且实际转子位置丢失。在大多数情况下这个 A - A
步进控制器不会注意到步进损失 B
并将导致应用程序出现故障。直到
*由比利时佛兰德斯研究基金会(FWO)的博士学位资助的研究
(a) (b)
图1.两相混合式步进电机,每个堆叠50个转子齿,前视图(a)和横截面(b)
2405-8963copy;2018,IFAC(国际自动控制联合会)主办Elsevier Ltd.保留所有权利。由国际自动控制联合会负责的同行评审。
10.1016j. ifacol. 2018.06.046
Temszlig;
q
s
e
is
Urd
delta;
theta;
beta;
t负载
omega;
步损
效率
高
负载角delta;
低
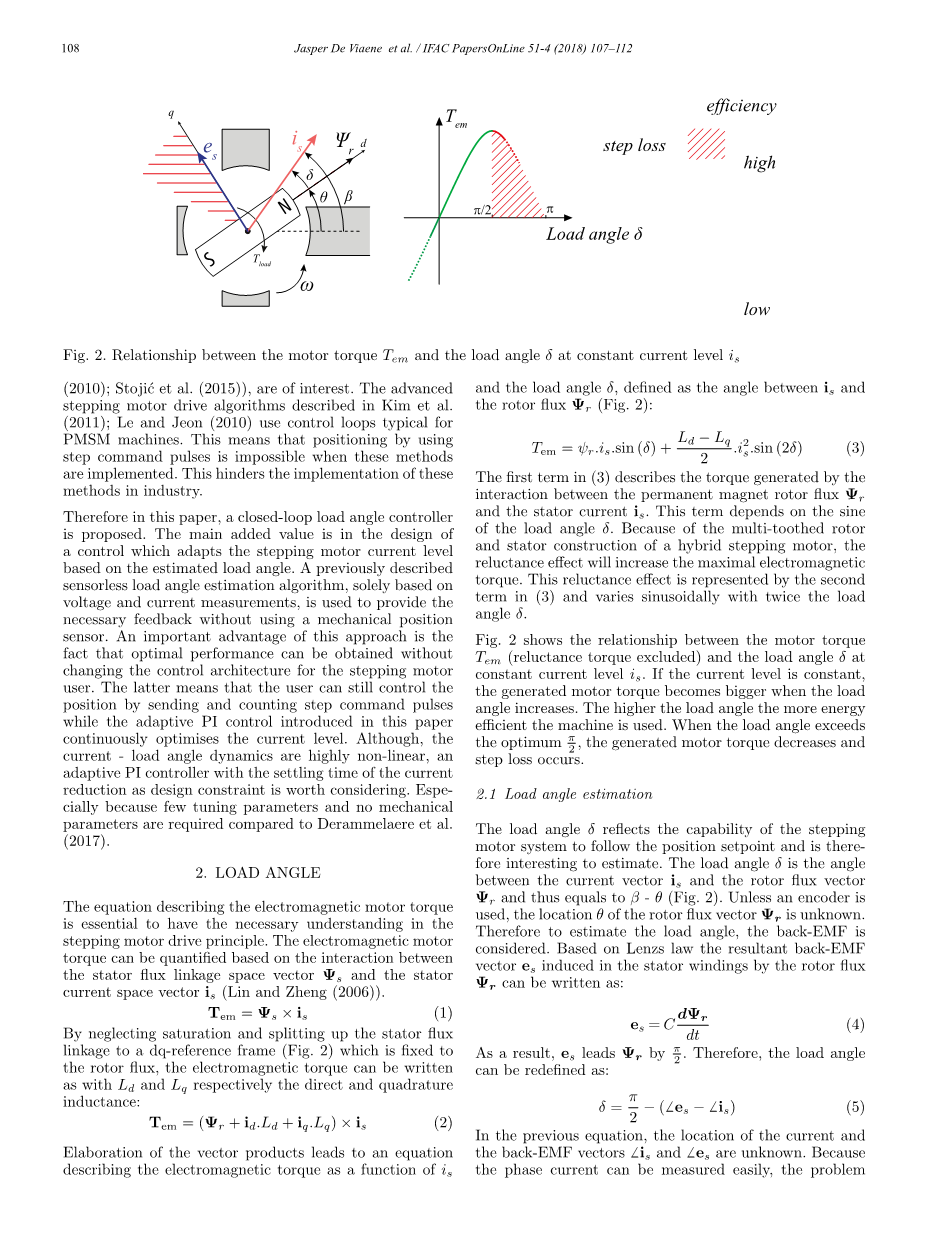
图2.恒定电流水平i下电机转矩T埃姆 与负载角delta;之间的关系s
(2010);Stoji#39;c等。(2015)),感兴趣。Kim等人描述的先进步进电机驱动算法。(2011);Le和Jeon(2010)使用PMSM机器的典型控制回路。这意味着当实现这些方法时,使用步进命令脉冲进行定位是不可能的。这阻碍了这些方法在工业中的实施。
因此,本文提出了一种闭环负载角控制器。主要附加值在于控制器的设计,该控制器基于估计的负载角度来调整步进电机电流水平。先前描述的仅基于电压和电流测量的无传感器负载角估计算法用于在不使用机械位置传感器的情况下提供必要的反馈。这种方法的一个重要优点是可以在不改变步进电机用户的控制架构的情况下获得最佳性能。后者意味着用户仍然可以通过发送和计数步进命令脉冲来控制位置,而本文介绍的自适应PI控制可以持续优化当前水平。虽然,电流 - 负载角度动态是高度非线性的,但是自适应PI控制器具有电流降低的建立时间作为设计约束值得考虑。特别是因为与Derammelaere等人相比,需要很少的调整参数和机械参数。(2017年)。
- 负载角度
描述电磁电机转矩的公式对于对步进电机驱动原理有必要的理解是必不可少的。可以基于定子磁链空间矢量Psi;s 和定子电流空间矢量is 之间的相互作用来量化电磁电动机转矩(Lin和Zheng(2006))。
和负载角delta;,定义为is 和转子磁通Psi;r 之间的角度(图2):
T =968 I SIN(DEU) Ld - LqI2。 (3) 2
埃姆 r s s
(3)中的第一项描述了由永磁转子磁通Psi;r 和定子电流is之间的相互作用产生的转矩。该项取决于负载角delta;的正弦值。由于混合式步进电机的多齿转子和定子结构,磁阻效应将增加最大电磁转矩。这种磁阻效应由(3)中的第二项表示,并且以负载角delta;的两倍正弦变化。
图2示出了电动机转矩T埃姆 (排除的磁阻转矩)与恒定电流水平i下的负载角delta;s之间的关系。如果电流水平恒定,则负载角度增加时产生的电动机转矩变大。负载角越高,机器使用的能量效率越高。当负载角超过最佳值 pi; 时,产生的电动机转矩减小并发生阶跃损失。
2
2.1负载角估计
负载角delta;反映了步进电机系统遵循位置设定点的能力,因此有待估算。负载角delta;是电流矢量is 和转子磁通矢量Psi;r 之间的角度,因此等于beta;-theta;(图2)。除非使用编码器,否则转子磁通矢量Psi;r 的位置theta;是未知的。因此,为了估计负载角,考虑反电动势。根据Lenzs定律,由转子磁通Psi;r 在定子绕组中感应的合成反电动势矢量es 可写为:
Tem = Psi;s times; is (1)
忽略饱和并分裂定子磁通
e = C dPsi;r
s dt
2
(4)
连接到固定的dq参考框架(图2)
结果,es 通过 pi; 导致Psi;r 。因此,负载角度
转子磁通,电磁转矩可分别写成Ld 和Lq 直接和正交
电感:
可以重新定义为:
pi;
delta; = minus; (/e
minus; /i ) (5)
Tem = (Psi;r
id.Ld iq.Lq) times; is
(2)
2 s s
在前面的等式中,当前和的位置
矢量产品的详细说明导致描述作为i的函数的电磁转矩的等式s
反电动势矢量/ is 和/ es 是未知的。因为可以很容易地测量相电流,这个问题
估计负载角的估计减少到估计反电动势的位置的问题。可以基于定子绕组的电压方程来估计反电动势。两相之间没有相互作用,因为它们彼此垂直并且假设恒定电感(Bendjedia等人(2012))。因此,忽略互感,反电动势可写为:
步骤命令。电流从标称电平降低到以特定速度和负载转矩设定值驱动电机所需的最小电流。负载角的信息用于以节能的方式控制步进电机。这种方法具有挑战性,因为电流 - 负载角动态是高度非线性的。因此,Derammelaere等人。(2017)提出了线性化模型。这样,s域中的线性理论可用于调整PI负载角度控制器。如
es(t)= us(t) minus; Rs.is(t) minus; L
二s
sdt的
(6)
结果,Kp 和Ti 都取决于机械阻尼b,惯性J,扭矩常数Ct,
设定点负荷角delta;lowast;,阻尼系数zeta;和负荷
方程式中的导数。(6)如果测量会导致问题
红色电流包含噪音。确定。的衍生物
角delta;i
最大
在最大电流水平。最后一个很容易
噪声信号会导致估计失真。因此Derammelaere等人。(2014a)建议在频域中写入(6),其中omega;代表信号脉动:
es(J)=Us(J) Rsis(J) J.-Lsis(J) (7)
根据该方法,仅需要诸如定子电阻和电感的电参数以及易于测量的相电流和电压的复杂表示来估计负载角。在步进电机应用中,只要没有发生阶跃损失,位置和速度设定点由用户发送的步进命令脉冲确定。这意味着位置和速度总是已知的,因此瞬时信号脉动omega;也是已知的。测量的电压和电流信号的复分量Ua(jomega;)和Ia(jomega;)通过从时域到频域的信号变换来确定。De Viaene等。(2017)描述了一种基于锁相环的估计器,即使在速度瞬变期间也能够确定复杂的分量。
- 负载角度控制器
工
全文共9162字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[2797]
您可能感兴趣的文章
- 拟人手臂的轨迹规划与轨迹跟踪控制外文翻译资料
- 新型磁性辅助内窥镜系统在上消化道检查中应用的可行性 和安全性外文翻译资料
- 基于FPGA可编程逻辑器件的复合视频图像处理外文翻译资料
- 从被测的高频域原始信号中提取巴克豪森噪声外文翻译资料
- 重型机床z轴热误差混合建模方法外文翻译资料
- 一个红外浊度传感器:设计与应用外文翻译资料
- 用于控制食物烹饪过程的电子系统.外文翻译资料
- 关于液体介质中电磁流量计的设计和理论上存在的问题。第二部分:关于带电粒子产生的 噪声理论外文翻译资料
- 基于LabVIEW和Matlab的小波变换对非平稳信号的分析仿真外文翻译资料
- 应用于腹腔镜手术的新型膜式加热加湿器 的开发外文翻译资料

