英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
文献翻译
直线型独立悬架与传统悬架的比较分析
刘翔,张洁,赵京山
摘要:悬架在车辆操纵稳定性和乘坐舒适性方面起着至关重要的作用。 本文讨论了一种在理论上具有直线特性的新型悬架。 因此它被称为直线悬架。 所以,如果悬架部件的弹性被忽略,这种悬架的对准参数在颠簸和反弹期间是保持不变的。 根据直线型悬架的结构特点,它适合被安装在后轴上。 为了评估其性能,我们通过ADAMS建立动力学模型。 另外,将直线悬架与双梯形连杆悬架进行比较。 进一步,通过K&C测试结果显示直线悬架的对准参数与麦弗逊式悬架的对准参数相比几乎不变。
关键词:直线型悬架,麦弗逊式悬架,双梯形连杆悬架,运动与合规,K&C测试
参考文献:刘翔,张洁,赵京山,“与传统的独立悬架的比较分析”,SAE
引言:
车辆的操纵稳定性和乘坐舒适性与悬挂系统的性能密切相关。因此,对悬架设计的严格要求就是当前所要求的高速安全性和乘坐舒适性。目前,车辆悬架系统主要包括非独立悬架和独立悬架,其主要区别在于导向机构,它决定了车轮的对准参数。悬架导向机构的主要目标是确保车轮定位参数保持尽可能小的范围内变化[1]。为实现这一目的,研究人员的研究主要集中在两个方面,一个是悬架的运动学分析和优化[1,2,3,4,5],另一个是悬架机构的创新设计[6,7,8 ]。运动学分析和优化主要涉及ADAMS的运动学和顺应性(K&C)模拟[1,2,3]和优化硬点[4,5]。另一方面,赵京山等人[6,7,8]提出了一种由四个相同的3自由度旋转关节(4-RRR)链组成的悬挂机构,它同时具有直线导向功能。
目前,传统悬架的对准参数在颠簸和反弹期间在一定时间间隔内发生变化。运动特性对悬架机构的硬点极其敏感。相反,赵京山等人[6,7,8]所提出的新的悬架机构可以克服传统悬架的不足。
这篇论文综合分析4-RPR链悬架,并通过移动性分析首先验证了它的直线导向功能。 然后通过ADAMS建立其动力学模型来研究K&C(运动学和顺应性)特性。 进一步,将该悬架与双梯形连杆悬架进行比较。最后,K&C测试结果显示直线型悬架的对准参数相对于麦弗逊式悬架几乎不变。
1直线机构的综合:
悬架导向机构的设计目标是保持对准参数在尽可能小的范围内变化。 所以理想的悬架导向机制应该具有直线引导功能。 也就是说,理想的悬架机构应限制转向节的5个自由度,包括两个平移和三个旋转。 对于4RRR悬架机构,每个RRR运动链提供2个约束力矩和1个约束力。 基于螺旋理论,将RRR运动链的中间转动关节替换为棱柱关节从而产生了RPR运动链,这种RPR运动链与之前的RRR运动链具有相同的终端约束和自由运动。 所以4-RPR悬挂机构与4-RRR机构具有相同的直线导向功能。
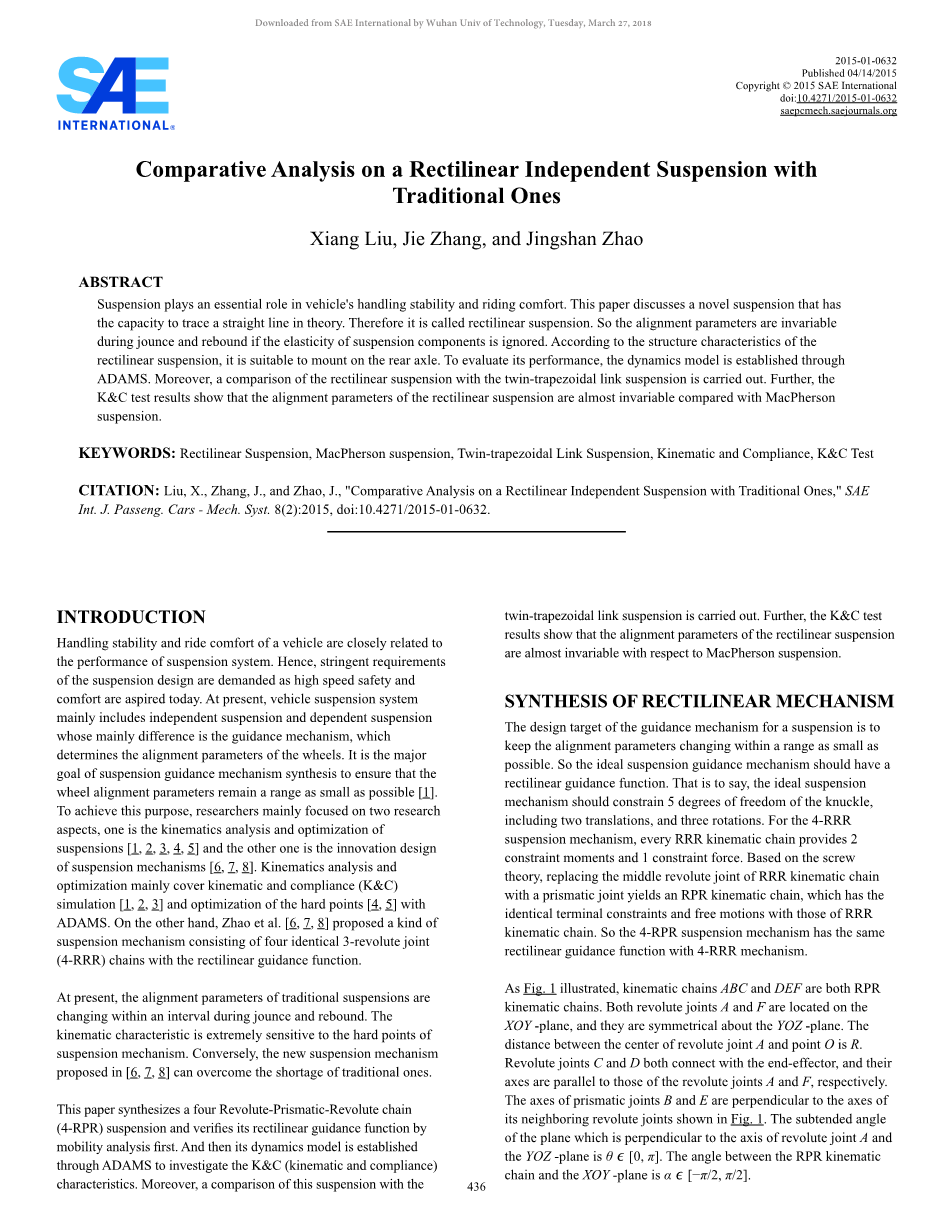
如图1所示,运动链ABC和DEF都是RPR运动链。 两个旋转接头A和F都位于XOY平面,它们关于YOZ平面是对称的。 旋转关节A的中心到O点的距离为R.旋转关节C和D都与末端执行器连接,它们的轴线分别与旋转关节A和F的轴线平行。 棱柱节点B和E的轴线垂直于图1所示的相邻旋转节点的轴线。垂直于旋转节点A轴线和YOZ平面的平面的对角角度为theta; ∊ [0, pi;]。 RPR运动链与XOY平面之间的角度为alpha; ∊ [minus;pi;/2, pi;/2]。
图1 2-RPR机制的几何模型
建立局部坐标系Ax1y1z1,其x1轴与旋转关节A轴线重合,z1轴与Z轴平行,y1轴按右手法则求得。 假设AC的长度为l,则运动链ABC的旋转关节的运动螺杆表示为:
基于互逆螺旋理论,得到了运动链ABC的末端约束:
根据表达式,运动链ABC的终端约束分别是一个沿x1 轴的约束力以及两个绕y1轴和z1轴约束力矩。 同样,也可以获得局部坐标系x2y2z2中运动链DEF的终端约束。 因此,OXYZ平台的终端约束可以用矩阵形式表示:
因此,当sintheta;ne;0或costheta;ne;0时,即theta;ne;0或pi;/ 2或pi;时,约束矩阵$ r的秩为5.因此,末端执行器的运动螺杆是:
等式(2)表明,2-RPR机制只有一个沿着Z方向的自由度。 所以2-RPR机制可以作为独立悬架的导向机构。 考虑到悬架机构在应用中的承载能力较大,增加了一个额外的2-RPR机构,形成4-RPR过度约束的悬架机构,可以提高结构强度和承载能力。
动态建模与仿真
动态建模
为了评估直线悬架的K&C特性,建立了它的动力学模型。双梯形连杆悬架和海马家族配备的麦弗逊式悬挂的动态模型也是如此。
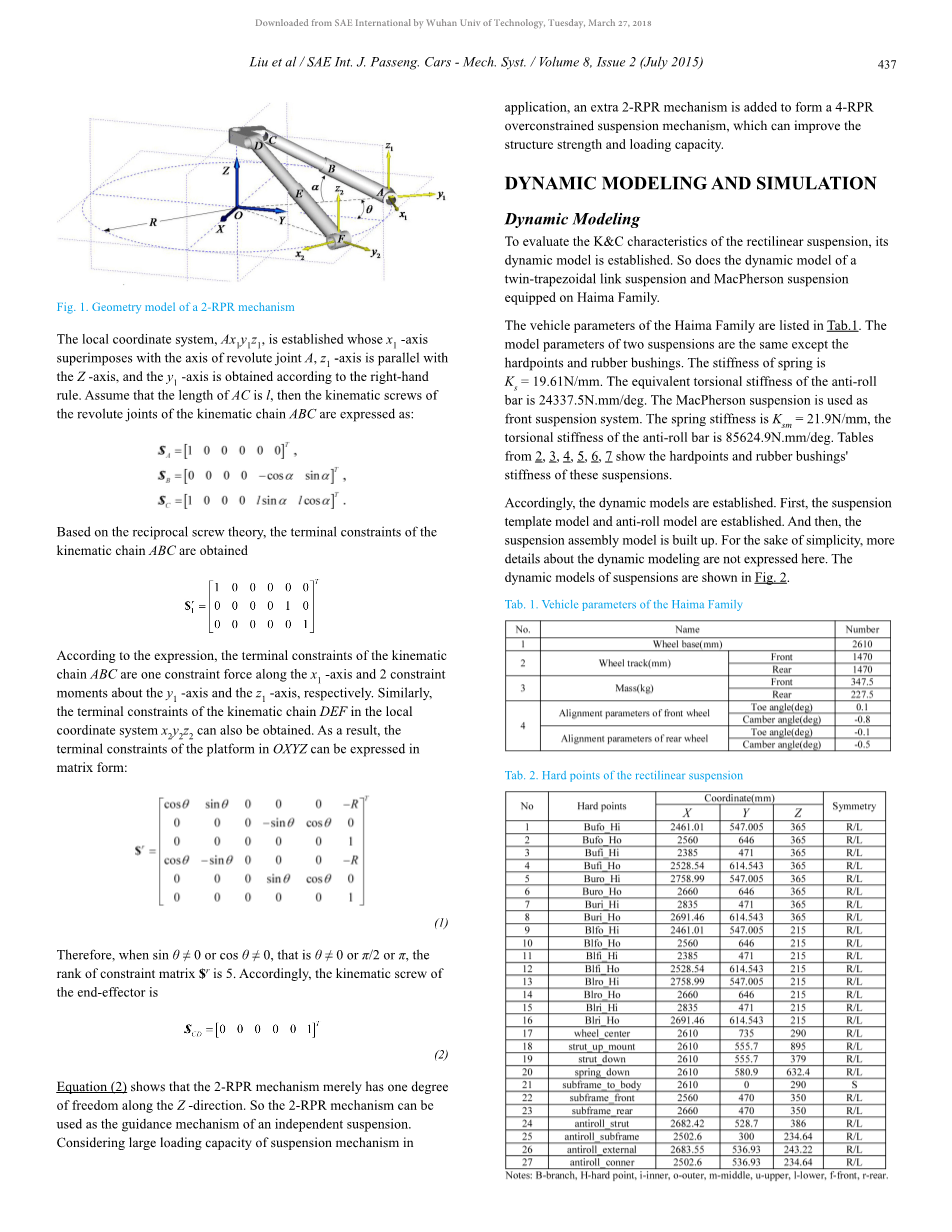
表1列出了海马家族的车辆参数。两个悬架的模型参数除了硬点和橡胶衬套都是相同的。弹簧刚度为Ks=19.61N/mm。防倾杆的等效扭转刚度为24337.5N.mm/deg。麦弗逊式悬架被用作前悬架系统。弹簧刚度为Ksm = 21.9N /mm,防倾杆的扭转刚度为85624.9N.mm/deg。表2,3,4,5,6,7显示了这些悬架的硬点和橡胶衬套的刚度。
相应地建立动态模型。首先建立悬架模板模型和防滚动模型。然后,建立悬架组件模型。为了简单起见,关于动态建模的更多细节不在这里表述。悬架的动态模型如图2所示。
表1 海马家族的车辆参数
表2 直线型悬架的硬点
表3 橡胶衬套在直线型悬架上的刚度参数
表4 双梯形连杆悬架的硬点
表5 双梯形连杆悬架橡胶衬套的刚度参数
表6 麦弗逊悬架的硬点
表7 麦弗逊悬架橡胶衬套的刚度参数
(a) 直线型悬架
(b) 双梯形连杆悬架
(c) 麦弗逊悬架
图2 三种悬架的动态模型
仿真结果:
使用ADAMS进行悬架仿真主要包括平行车轮行驶,反向车轮行驶。 平行轮行驶评价指标为外倾角,前束角,轮距,车轮轨迹,悬架速度。 除上述指标外,对轮行程的评价指标还有滚动中心位置,悬架滚转率,滚动外倾系数。
1.平行车轮行驶
模拟参数设置为:步数100,凸块行程50mm,反弹行程-50mm。 仿真结果如图3所示,其中“RL”,“TTL”和“Mac”分别是直线悬架,双梯形连杆悬架和麦弗逊悬架的简称。 对齐参数的变化如表8所示。
通过图3和表8数据,可以发现直线悬架的对准参数与双梯形连杆悬架和麦弗逊式悬架相比几乎不变。 麦弗逊式悬架的前束角远大于其他两种由转向连杆效应产生的悬架。
图3 平行轮行程的仿真结果
表8 对准参数的变化 - 平行轮行程
2.反向车轮反向行驶
模拟参数设置为步数40步,碰撞行程20mm,反弹行程-20mm。反向车轮行驶用于评估车辆的滚动特性。仿真结果如图4所示。图9显示了对准参数的变化。图4所示的曲线对应于右侧悬架。
根据图4和表7可知,直线型悬架的对准参数比双梯形连杆悬架的对准参数好,除了前束角之外。在反向车轮行驶期间,防倾杆会导致转向节上存在一个外力。考虑到将减震器与防倾杆垂直连接的直线悬架的连杆,得出的结论是,直线型悬架的Z轴的扭转刚度小于双梯形连杆悬架的Z轴的扭转刚度。直线悬架的滚动中心的垂直位置约为40mm,双梯形连杆悬架和麦弗逊悬架的垂直位置约为140mm和110mm。此外,直线悬架的横向位置几乎不变。如结果显示,配备有直线悬架的车辆的质心要低得多,这可以提高操纵稳定性。由于麦弗逊式悬架弹簧和防倾杆的刚度较大,相应的侧倾率远远大于其他两种悬架。直线悬架与双梯形连杆之间的滚动速度差异是由防倾杆和减震器的设置造成的。与双梯形连杆悬架相比,直线悬架具有更好的抵抗侧倾运动的能力。直线悬架的滚动外倾系数大于其他两个悬架的滚动外倾系数,表明车辆的滚动运动状态对外倾角有明显的影响。另外,麦弗逊式悬架系数的突然变化主要取决于转向系统。
图4 反向车轮行程的仿真结过果
表9 对准参数的变化 - 反向车轮行驶
根据仿真结果,直线悬架比双梯形连杆悬架和麦弗逊悬架具有更好的K&C特性。
直线型悬架的K&C测试
悬架结构设计
本文中描述的悬架是一种4-RRR并行机构。它通过旋转关节与关节连接。对于悬架系统的结构设计,应考虑以下因素。
①运动链必须符合强度和刚度的要求。在极端条件下,运动链不仅应该安全,而且机构的变形也应尽可能小。
②棱柱接头的摩擦阻力值应小。
③运动关节之间的间隙应该很小。太大的间隙会导致对准参数的巨大变化和车轮的不确定运动。
④悬挂机构应易于安装和维护。另外,使用寿命和成本在应用中都满足要求。
由于存在相对移动,运动铰链可以设计具有表面接触,线接触或点接触。不幸的是,表面接触的摩擦阻力太大会影响棱柱接头的运动灵活性。如果采用点接触,会出现应力集中,链条的承载能力会变差。在应用中,采用滚珠花键接头的标准组件来降低成本。悬架原型的分支结构如图5所示。
图5 悬架原型的运动链的结构
运动链由短连杆,长连杆和滚珠花键组成。短连杆通过安装有橡胶衬套的旋转接头与转向节连接,如图6(a)所示。长连杆还通过旋转接头与副车架连接。 固定环通过螺栓与花键轴连接,这样可以避免花键轴在加工过程中从花键轴套中拔出。 橡胶衬套用于缓解冲击载荷,防尘罩可以起到防水和防腐作用。 图6(b)显示了悬架原型。
橡胶衬套设计为一个部件,包括一个外部钢领环,一个橡胶,一个内部钢领环和一个轴承。 外环,橡胶和内环通过硫化结合在一起。 轴承用于承受轴向力并避免旋转间隙。
- 橡胶衬套 (b)悬架
图6 直线悬架的原型
K&C测试
1.实验设备
KSS-15是单轴车辆的悬架运动学和一致性测试装置,用于评估直线悬架的性能。 海马提供的麦弗逊式悬架组件用于测试试验台的功能。 所以在这里进行麦弗逊式悬架和直线式悬架的比较。 如图7所示,麦弗逊式悬架装配在左侧。 事实上,这是一个前悬架系统,但转向系统在实验过程中被释放。 直线悬架组装在试验台的右侧。
图7 悬架系统试验台的概述
- 麦弗逊式悬架 (b)直线式悬架
图8 麦弗逊式悬架和直线悬架的测试
2.测试结果
在试验台中测量外倾角,前束角和轮距在plusmn;40mm范围内进行颠簸和反弹。 进行平行车轮实验,初始负荷为2600N。 在测试过程中,施加在车轮上的负载从1800N变为4000N。 对准参数的测试结果如图9所示。
图9 Kamp;C测试结果
在图9中,由于悬架的弹性元件的间隙和变形,对准参数在一个区间内变化。 K&C测试结果大于模拟测试结果。 与麦弗逊式悬架相比,直线悬架的对准参数变化要小得多。 所以很容易得出这样的结论:直线悬架在运动学上比麦弗逊式悬架好得多。 同时悬架的有效载荷随着悬架行程的变化而变化,导致对准参数的变化。
结论
本文综合分析了一种新型的直线导向悬架机构。基于ADAMS软件和测试数据的仿真结果表明,直线悬架具有出色的运动学性能。因此,它适用于不同的车辆底盘,并且在未来具有广泛的应用前景。 该论文为直线悬架的设计奠定了良好的基础,这对于进一步的研究具有重要意义。
补充:
重型矿用卡车独立前桥悬架的相对性能分析
康依婷和Subhash Rakheja
康考迪亚大
全文共6904字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[12526],资料为PDF文档或Word文档,PDF文档可免费转换为Word

