
英语原文共 15 页
3.25汽车
一种设计用于在公共街道,道路和高速公路上提供运输可能的机器。
注意:如本文件中所使用的,车辆是指机动车辆,不包括仅在铁路线路上运行的车辆。参考文件49 U.S.C. sect;30102(a)(6)将机动车定义如下:“机动车辆是指由机械动力驱动的车辆,主要生产用于公共街道,道路和高速公路,但不包括仅在铁路线上运营的车辆。”
4.驾驶自动化的分类
上面定义的术语为驾驶自动化分类提供了六个独立和相互区别的级别(见8.2节)。 该分类法的核心是(人)用户和驾驶自动化系统各自相对于彼此的角色。因为驾驶自动化系统功能的变化改变了(人类)的角色用户,他们提供了对此类系统进行分类的基础。例如:
如果驾驶自动化系统执行持续的纵向和/或横向车辆运动控制DDT的子任务,司机不这样做,虽然通常DDT由他/她完成。这种角色划分对应1级和2级。
如果驾驶自动化系统执行整个DDT,则用户无需这样做。 但是,如果DDT性能相关系统发生故障或驱动自动化系统即将离开其操作设计域(ODD)时,那么当有人提醒用户需要这样做时,用户应该能够接受并能够恢复DDT性能。这种角色划分对应于第3级。
最后,如果驾驶自动化系统能够在规定的ODD内或在所有驾驶员可管理的道路驾驶情况下(不限于ODD),则在自动驾驶系统启用时,车辆中的任何用户都是乘客。这种角色划分对应于4级和5级。
车辆也在这一驾驶自动化分类中发挥作用,但车辆的作用不会改变用户在执行DDT时的作用。
通过这种方式,驾驶自动化系统的分级可以依据以下几点:
驾驶自动化系统是否执行DDT的纵向或横向车辆运动控制子任务。
驾驶自动化系统是否同时执行DDT的纵向和横向车辆运动控制子任务。
驾驶自动化系统是否也执行DDT的OEDR子任务。
驾驶自动化系统是否也执行DDT回退。
驾驶自动化系统是否背限于一个ODD。
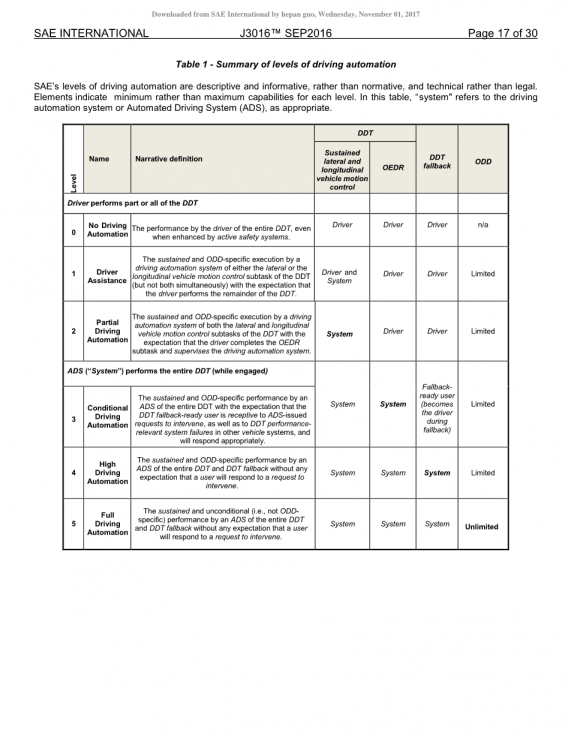
表一(下表)根据这五个要素将驾驶自动化系统分为六级。
表1 自动驾驶等级总结
SAE的驾驶自动化水平是描述性的、信息性的,而不是规范性的、技术性的和法律性的。元素表示每个级别的最低而不是最高能力。在本表中,“系统”指的是驾驶自动化系统或自动驾驶系统(ADS),视情况而定。
系统结构特征:
图8用于为系统特征划分驾驶自动化级别的简化逻辑流程图
图8展示了用于对驾驶自动化功能进行分类的简化逻辑图。请注意,回答本图中提出的问题所需的信息无法凭经验推导出来(见8.1)。
表2(下面)详细介绍了驾驶自动化的六个级别,参考了用户和驾驶自动化系统在执行DDT和DDT故障时所扮演的角色(如果有的话)。(注意:这种角色分配是指车辆操作的技术方面,而不是法律方面。)
表2第2列中提供的描述表明用户在执行部分或全部DDT和/或处理DDT故障时的角色(如果有的话),而第3列中提供的描述表明了驾驶自动化系统的角色(如果有的话)执行相同的操作。 如表1所示,“系统”是指适当的驾驶自动化系统或ADS。
注意,前述作用由驾驶自动化系统的设计结合提供给用户的指令确定,而不管特定驾驶自动化系统中的故障或用户在给定环境中对其角色的误操作。(见8.1)。
表2 在驾驶自动化等级中驾驶员和驾驶自动化系统扮演的角色
下表3描述了用户在特定驾驶自动化水平和特定时间点的驾驶自动化系统中的角色。在特定的行程中占用给定车辆的用户可以有三种可能的角色:1)驾驶员,2)DDT故障备用用户或3)乘客。给定车辆的远程用户(即,在使用过程中未坐在车辆驾驶员座椅上的人)也可以在特定情况下扮演三个可能的角色之一:1)远程驾驶员,2)DDT故障备用用户或3)调度员。
表3 当驾驶自动化系统开启时的用户角色
注意:配备4级或5级自动驾驶系统的车辆也可以支持驾驶员的角色。例如,为了完成一个给定的行程,配备了一个设计用于在高速公路条件下运行的4级ADS功能的汽车的驾驶员,通常在高速公路结束时选择自己执行DDT;否则将自动执行超出ODD范围的部分并实现所需的最低风险条件。但是,与级别3不同,当ADS开启时此用户不是一个DDT故障备用用户。
5. 驾驶自动化等级或类别
如上所述,驾驶自动化水平基于驾驶自动化系统的功能,如在系统和(人)用户(如果有)之间的DDT和DDT故障性能中角色的分配。驾驶自动化系统的制造商确定了系统的要求、操作设计领域(奇数)和操作特性,包括以下定义的驾驶自动化水平。制造商也定义该系统的正确使用。
较低的两个驾驶自动化等级(1-2)是指驾驶自动化系统启动时,(人)驾驶员继续执行部分DDT的情况。
驾驶自动化的上三级(3-5)是指自动驾驶系统(ADS)在接合时持续执行整个DDT的情况。
5.1等级或类别0-无驾驶自动化
驾驶员完成整个DDT,即使有主动安全系统加持。
5.2等级或类别1-驾驶员辅助
在特定的可操作设计区间由驾驶自动化系统控制DDT的横向或者纵向控制子任务(但不是同时发生),驾驶员完成剩余部分的DDT。
注意:执行DDT横向或纵向车辆运动控制子任务的1级功能能够控制仅限于其尺寸范围内的有限OEDR(横向或纵向),这意味着有些事件驾驶自动化系统不能识别或响应。因此,驾驶员必须通过完成DDT的OEDR子任务以及执行其他类型的车辆运动控制来监督驾驶自动化系统。参见图1(讨论DDT的三个主要子任务)。
5.3等级或类别2-部分驾驶自动化
在特定的可操作设计区间由驾驶自动化系统控制DDT的横向和纵向控制子任务,驾驶员完成OEDR并对驾驶自动化系统进行监督。
注意:2级驾驶自动化系统的特征仅限于有限的OEDR,这意味着有些事件驾驶自动化系统不能识别或响应。因此,驾驶员必须通过完成DDT的OEDR子任务监督驾驶自动化系统。参见图1(讨论DDT的三个主要子任务)。
5.4等级或类别3-条件驾驶自动化
在特定的可操作设计区间由自动驾驶系统控制DDT的横向和纵向控制子任务,DDT故障备用驾驶员接受ADS的请求进行干预,对于和DDT性能相关的其他系统错误进行合理响应。
注意1:DDT故障备用用户3级ADS开启时无需进行监督,但应准备在ADS发出干预请求时恢复DDT,如发生与DDT性能相关的系统故障时。
注意2:3级ADS的DDT故障备用用户也应能够接受与DDT性能相关的不一定触发ADS发出的干预请求的系统故障,例如车身或悬架部件断裂。
注意3:如果3级ADS出现DDT性能相关系统故障或当ADS将很快退出ODD时,ADS就会在足够常人做出合理响应的时间内发出一个请求,对驾驶环境做出响应。
注意4:DDT故障后备用户对干预请求的“适当”响应可能使车辆处于最低风险状态或在ADS断开后继续操作车辆。
例子:一种ADS功能,能够在低速、停行高速公路交通中执行整个DDT。
5.5等级或类别4-高驾驶自动化
在特定的可操作设计区间通过自动驾驶系统完成DDT,在DDT出现变动时无需驾驶员响应请求进行干预。
注意1:用户无需监督4级ADS,当ADS开启时也无需接受干预请求。4级ADS能够自动处理DDT故障,当用户不恢复DDT的性能实现时最小风险状态。这种自动处理DDT故障和最低风险条件实现能力是4级和3级ADS的主要区别特征。这意味着参与4级ADS的用户是不需要响应干预请求或处理DDT性能相关系统故障的乘客。
注意2:4级ADS功能可设计为在整个行程中(例如,封闭校园)操作车辆往返,或者它们可以设计为在满足ODD要求后仅在给定行程的一部分内运行(例如,在高速公路上巡航),例如,为了完成给定的行程,配备设计为在高速公路环境运行的4级ADS功能的车辆用户一般会选择在高速公路结束时执行DDT;否则ADS将自动处理DDT故障,并根据需要达到最低风险条件。但是,与级别3不同,在ADS启用时此用户不是DDT故障备用用户。(见下面的示例2)。
示例1:4级ADS功能能够在没有驾驶员监督的情况下在代客泊车期间运行(即路边到门,反之亦然)。
示例2:4级ADS功能,能够在机动车道或高速公路上持续执行整个DDT(即在其ODD内)。(注意:本例中设想了DDT座椅上的驾驶员,因为驾驶员对DDT的作用在进入高速公路或高速公路之前,以及离开高速公路之后是必要的。因此,这种特征会提醒用户在退出ODD之前应立即恢复车辆操作,但如果用户未能对此类警报作出响应,ADS仍将处理DDT故障并自动实现最低风险状态。)
示例3:调度员可以使用4级ADS专业车辆在有限的地理区域内按照预先确定的路线行驶(如居住区、军事基地、大学校园)。
5.6等级或类别5-全驾驶自动化
持续的无条件的(换言之即非ODD特定的)通过整个DDT的自动驾驶系统控制性能,在DDT出现变动时无需驾驶员响应请求进行干预。
注意1:“无条件/非ODD特定的”是指ADS可以在所有驾驶员可管理的道路条件下操作车辆。这意味着,例如,没有设计预想的的天气、时间或地理位置来限制ADS何时何地可以操作车辆。但是,可能有条件不可由驾驶员控制,在这种情况下,ADS将无法完成给定的行程(即,暴风雪,洪水淹没的道路、凌冽的的冰雪等),除非不利条件消除。在这种不可管理的情况下ADS将处理DDT故障以达到最低风险条件状态(例如,通过将车辆停在道路一侧,等待环境改变)。
注意2:当与DDT性能相关的(ADS或者汽车的)系统故障出现时,5级ADS将自动处理DDT故障并达到最小风险状态。
注意3:用户无需监督5级ADS,当ADS开启时也无须接受干预请求。
示例:一种带ADS的车辆,一旦设置了目的地,就能够操作该车辆完成整个公共道路的完整行程,无论起点和终点或中间道路、交通和天气状况。
6.可操作设计区间(ODD)的重要性
从概念上讲,驾驶自动化系统相对于用户在部分或全部DDT性能中的作用与他们角色所处的特定环境是对应的:例如,自适应巡航控制的特定实施,可能仅在高速、低速或所有速度下出现。
然而,为了简单起见,J3016的分类法将这两者精简成一组驾驶自动化级别。级别1到4明确考虑了ODD的限制。相比之下,5级明确不计任何此类限制。
相应的,准确地描述特征(除了5级)需要确定其驾驶的自动化水平和它的设计可操作设计区域(ODD)。和上面所定义的一样,驾驶自动化等级和ODD的结合体称为使用说明书,一个给定的驾驶特性满足一个给定的使用说明书。
由于可能的ODD概率范围很广,每个级别都可能存在各种可能的特征(例如,级别4包括停车、高速、低速、地理围栏等)。因此,SAE J3016提供了较少的关于ODD属性的详细信息。它可以定义一个给定的特性,而不是驾驶自动化系统及其用户各自的角色。
ODD对于理解为什么一个ADS不是5级是特别重要的,仅仅因为他操纵一个ADS专用的汽车。与5级ADS不同,4级ADS的ODD是有限的。ADS专用车的地理或环境限制
可能反映了其ADS的ODD局限(或可能反映了车辆设计局限性)。
图9说明了ODD与于驾驶自动化水平等级的对应性。
图10阐述了对于各级别来说ODD的重要性
图11 ODD和等级间的关系
7. 不推荐使用的术语
为了清楚起见,本节确定了本推荐做法中未使用的某些不推荐使用的术语。要么是因为它们的功能不精确(因此具有误导性),要么是因为它们经常被应用于较低级别的不执行整个DDT的驾驶自动化(即1级和2级)。
7.1自动的、自动驾驶、无人驾驶的、无人的、机器人的
像上面这样的不一致和混乱的白话术语有时被用来描述驾驶自动化系统和/或配备它们的车辆。因为自动化是使用电子或机械设备取代人力,根据《牛津英语词典》,自动化(通过“驾驶”进行修改以提供上下文)是用于执行部分或全部DDT的系统的适当术语。使用其他术语可能会导致混淆,误解,降低了可信度。
7.1.1自动的
这一术语在机器人和人工智能研究领域中已经使用了很长时间,用来表示有能力和权力独立和充分地做出决定的系统。随着时间的推移,这种用法是随意的扩大到不仅包括决策,而且代表整个系统功能,从而与自动化同义。这种用法掩盖了所谓的“自主车辆”是否依赖于与外部实体就重要功能(如数据采集和收集)进行沟通和/或合作。如果一些驾驶自动化系统能够独立、充分地执行其所有功能,那么它们可能确实是自主的,但如果它们依赖于与外部实体的通信和/或合作,则应考虑它们是合作而不是自主。一些方言用法将自主与完全驾驶自动化联系起来(5级),而其他用法则适用于所有驾驶自动化水平,一些州立法已经对其进行了定义,与第3级或以上的任何ADS(或配备此类ADS的任何车辆)大致对应。
此外,在法理学中,自治是指自我治理的能力。在这个意义上,“自治”在自动驾驶技术中也是一个误称,因为即使是最先进的ADS也不是“自治的”。相反,ADS基于算法运行,否则服从用户的命令。
由于这些原因,本文档没有使用流行的术语“自治”来描述驾驶自动化。
7.1.2自动驾驶
此术语的含义可能会因驾驶和驾驶员含义的未声明假设而有所不同。它是各种各样的用于指没有驾驶员的情况、没有用户执行DDT的情况以及在其中驾驶自动化系统正在执行DDT的任何部分的情况。
7.1.3无人驾驶的和无人的
这些术语经常被误用于描述任何配备2级或更高级别驾驶自动化系统的车辆。因为“驾驶员”可以有很多含义,“无人驾驶”可能会混淆而不是澄清。(根据J3016的定义,3级,4级或5级ADS能取代(人类)驾驶员

