英语原文共 17 页
一种2自由度柔性微夹持器的设计、制造和试验
RoysonDonateDsouzabull;KaranthP。Navinbull;TheoTheodoridisbull;PriyaranjanSharma
收到:2018年2月21日/接受:2018年2月27日/在线发布:2018年4月5日
德国斯普林格公司,斯普林格自然2018的一部分
摘要:
本文介绍了一种单片二自由度(2自由度)的用于操纵微对象的压电驱动微夹持器。微操作和微装配是近年来人们关注的主要课题,在许多领域变得越来越重要。正在努力开发一个新的2自由度微夹持器,每个微夹持端能够独立移动,从而掌握和旋转物体的微观尺寸。微夹持器是基于兼容的机制开发的。采用FEM和PRBM方法对设计的2自由度柔性微夹持器进行了建模,并进行了实验验证。微夹持器是使用APA120-S压电堆栈驱动器驱动。利用LabVIEW工具,利用图像处理技术测量了微夹钳的位移和夹持力。这个微夹持器进行了各种测试,以测量位移放大比和微操作实验。采用不同尺寸的金属丝对微夹持器的抓取顺序和旋转顺序进行测试。理论、仿真和实验结果表明,该微夹持器具有良好的性能。
1介绍
随着大量应用和技术的发展,微机电系统(MEMS)领域在过去的十年里已经多样化。为了简化微系统的组装,处理和操纵微对象一直是科学家和工程师最大的兴趣和挑战之一。MEMS的最新发展增加了对微操作技术的需求。微夹持器是理解微观层面物体装配的关键工具之一。例如傅里叶变换(FTIR)显微光谱仪是一个复杂的微型光电系统(MOEMS),其微装配涉及混合硅和玻璃组件的精密对准(Rabenorosoa等,2009)。自动化的微装配和微尺度上的精密对准导致了微操作。在微装配过程中,必须夹持、定向、对齐和释放微对象,这对可视化(Tamadazte等,2009)、力控制(Beyeler等,2007a)和控制策略(Rakotondrabe等,2009)提出了挑战。
大量的微型物体和零件是利用各种微加工技术开发和制造的。虽然微加工技术有了很大的进步,虽然微加工技术已经取得了很大的进步,但由于微装配在光学开关、MEMS光学加速度计、可变光衰减器、傅立叶变换光谱仪等光纤装配中的广泛应用(Noell等,2002),微装配仍然是一项具有挑战性的任务。基本上需要一个2自由度的运动来掌握和旋转光纤,并将其插入到U形槽中,以产生光学开关(Agnus等,2004)。它还发现了它在微部件装配使用视觉伺服,微装配的MOEMS使用力控制和微装配的可重构自由空间微光学工作台(RFS-MOB)(agsnoet等,2013)时的基本需求。大多数组件需要对从1微米到1毫米大小的组件进行顺序操作。微型物体是脆弱的,需要控制相互作用的力量,以便成功地操纵和定位它们。
微操作的各种原理,如吸力(Zesch等,1997;Pierrat等,2004),低温(Lang等,2005;Kochan,1997),静电(Beyeler等,2007b;Enikov等,2005)和摩擦操纵(Xu,2012)被用于各种微爪设计。摩擦微操作由于尺寸、成本、可靠性问题,特别是制造方面的问题,得到了广泛的应用,基于摩擦夹持法的微操作在过去的十年中已经发展出了好几种微夹持器。在摩擦操纵中使用了几种驱动技术,如静电驱动微爪(Kim等,1991;Wierzbicki等,2007;Kalaiarasi和Thilagar,2012;Amjad等,2008;Boudaoud等,2013),电热微夹持器((Duc等,2008b;Andersen等,2008;Ali等,2011;Zhang等,2013)形状记忆合金(SMA)驱动微夹持器(Kohl等,2000;休斯敦等,2007;Kyung等,2008)和压电式微夹持器,其中压电式微夹持器由于高力重量比,高操作带宽和不受限制的运动分辨率的优势受到人们的重视。
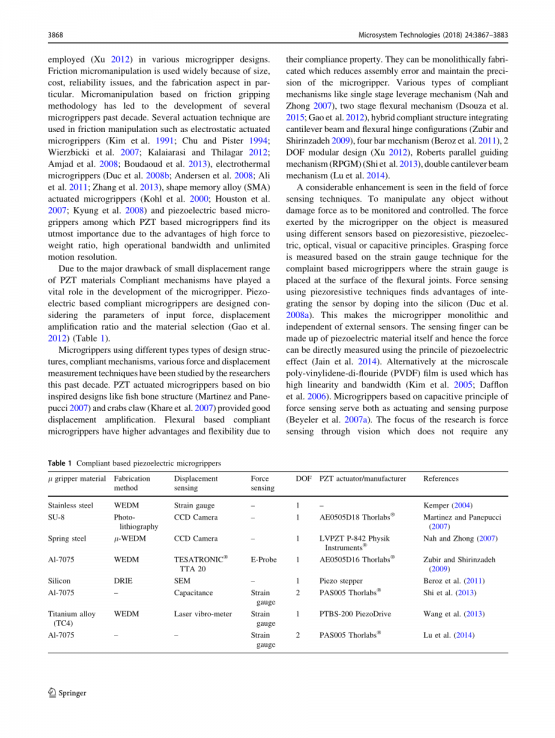
由于压电材料位移范围小的主要缺点,柔性机构在微夹持器的研制中起着至关重要的作用。设计基于压电材料的柔性微夹持器,需要考虑输入力、位移放大比和材料选择等参数(Gao等,2012)(表1)。
表1柔性压电微夹持器
在过去的十年里,研究者们研究了不同类型的微爪设计结构、柔性机构、各种力和位移测量技术。压电驱动微夹持器的设计是基于生物灵感,如鱼骨结构(Martinez和Panepucci,2007)和螃蟹爪(Khare等,2007),这些为夹持器提供了良好的位移放大。基于弯曲的柔性微夹持器由于他们的顺从性能,使得他们具有更大的优势和柔性,。他们可以它们可以整体制造,减少装配误差,保持微爪的精度。各种类型的柔性机制,如单级杠杆机制(Nah和zhong,2007),两阶段弯曲机制(Dsouza等,2015;Gao等,2012),悬臂梁与柔性铰链构型相结合的混合柔性结构(Zubir和Shirinzadeh,2009),四连杆机构(Beroz等,2011),2自由度模块化设计(Xu,2012),机器人平行导向机制(RPGM)(Shi等,2013),双悬臂梁机构(Lu等,2014)。
在力传感技术领域,技术水平有了相当大的提高。操纵任何物体的力,需要被监视和控制来保证物体不受伤害。微夹持器对物体施加的力是通过基于压阻、压电、光学、视觉或电容原理的不同传感器测量的。基于应变片技术的微夹持器抓取力的测量是依靠应变片被放置在弯曲关节表面的反馈,其中应变计放置在弯曲接头的表面。使用压阻技术的力传感集成传感器发现通过将在传感器中掺杂硅有极大的好处(Duc等,2008)。这使得微夹持器保持一个整体和外部传感器保持独立。传感手指本身可以由压电材料构成,因此可以利用压电效应原理直接测量力(Jain等,2014)。或者在微观上使用具有高线性和带宽的聚偏乙烯二氟化乙烯(PVDF)薄膜(Kim等,2005;Dafflon等,2006)。基于电容原理力觉传感器的微夹持器既可作为驱动元件,也可作为传感元件(Beyeler等,2007a)。该研究的重点是不在微夹持器内安装任何仪器,使得传感力可以直接读书,并提供高精度的静态力读数。一般使用CCD相机,是由于它提供了更高的灵活性来测量比简单悬臂梁更复杂的几何形状的力(Greminger等,2002;杨等,2001)。
在过去的十年中,各种不同自由度的微夹持器、位移和力传感器以及执行器的研究已经开始。本文提出了一种利用压电叠置执行器驱动两自由度微夹持器的新思路。提出了一种基于Labview的图像处理方法来测量微夹持器的尖端位移和力,为视觉传感的传感环境提供了一个平台。采用Lobontius柔性铰链设计对柔性微爪进行了数学建模,并进行了有限元分析,对结果进行了验证。采用电火花线切割工艺制作了所设计的微夹持器,并进行了实验测试。
2微夹持器的配置与设计
微夹持器的设计目的是抓住和旋转50至500微米之间的物体。首先要抓住物体,当物体完全抓住后,再进行旋转操作。微操作序列如图1所示。
图1由微夹持器执行的微操作序列
在初始定位时,光纤位于左右臂之间的抓握区域内。右臂由压电叠加执行机构APA120S驱动,APA120S完全握住电缆,其中微夹持器尖端以theta;角位移,提供最大的力。然后由压电叠片执行机构APA120秒驱动左爪旋转电缆纤维,使其产生两级运动。测试设置如图2所示。单片微爪由2个APA120秒堆叠执行器驱动,最大位移为120微米,最大电压为160V。微夹持器用M2尺寸的螺栓夹紧到底座上,微夹持器与底座之间有额外的间距,以避免表面接触。堆栈执行器使用附件夹紧到微爪上。APA堆栈执行器的性能和各种负载特性在之前的工作(Dsouza和Karanth,2016)中得到了实验测试。在之前的工作(Drsquo;souza等,2017)中,很少对微夹持器的设计进行测试,在考虑执行器和传感器参数以及微夹持器的性能的情况下,对微夹持器进行了优化设计,并对其进行了数学建模和有限元分析。该微夹持器是由Dessault系统在CATIAV5R19包中建模的。FE分析使用ANSYSV15工作台环境执行。
图2实验设置的详细视图
微夹持器的结构及其物理尺寸如图3所示。
图3 2自由度微夹持器的配置
左侧为单级杠杆机构和平行四边形机构,右侧为双级杠杆机构和平行四边形机构。微夹持器的右侧有两个放大装置。这两种装置都是兼容的杠杆装置,为夹持器提供了更大的输出与输入比,增加了位移放大因子。为保证夹爪的平行运动,采用柔性平行四边形机构。微夹持器的左侧部分具有由柔性杠杆机构构成的单级放大装置。在底板上存在M2尺寸的孔,将微夹持器稳定地固定在底板上。设计中使用了弯曲的圆角嵌条铰链,并对其进行了验证分析。这款微夹持器所有的铰链都设计成圆角嵌条铰链,并对其输出位移和应力进行了有限元分析。
3微夹持器的运动合成
根据Lobontiu的柔度机构法(Lobontiu 2002),设计了一种基于平面柔度机构的弯曲综合分析方法。该过程基于应变能和Castiglianos位移定理,并生成了包含任何分析定义铰链的柔度,以及柔度机构的其他几何和材料特性的闭合形式方程。
3.1夹持器右侧的运动合成
在Lobontius方法中,每个铰链都有三个自由度,因此可以用三个弹簧来建模。对于平面串联机构,利用环闭合法,利用卡斯蒂里亚诺斯第二定理求出弹簧在每个节点处的三次位移。平面串联机构的每个特定节点的位移是从相关的连杆到最后一个连杆的所有对应变形和刚体运动的总和。假定刚性连杆的柔度为零。因此,它允许统一公式的刚性链接和柔性铰链。图4a为微夹持器右侧的弯曲铰链和刚性连杆的折线图。
沿全局轴x的位移分量为:
其中系数Aix、Bix、Dix、Hix在Lobontiu(2002)中详细描述了将各因素相乘的方法。
沿全局轴y的位移分量为:
其中系数Aiy、Biy、Diy、Hiy在Lobontiu(2002)中详细描述了将各因素相乘的方法。
连杆l的转角为:
其中、在Lobontiu(2002)中有详细描述。
弯曲的圆角嵌条铰链的平面柔度因子为:
将角铰的参数代入公式(4)、(5)、(6)、(7)中得到了弯曲的圆角嵌条铰链的柔度参数。从输入节点到输出节点对微夹持器右颌的节点进行编号。从图中可以看出,节点2和节点9是固定的。由于终端节点10不固定,机构具有8个阻塞自由度,系统不确定。确定系统后,输入输入位移为30微米,对平面机构进行静力分析。
由于所有的柔性连接都是在90°的情况下得出,我们需要定义phi;=0°,因此我们可以得到Cosphi;=0,Sinphi;=1.
公式(4)、(5)、(6)、(7)中的规范因素、、、可以在表2中找到。
表2弯曲的圆角嵌条铰链柔度值
图4 A为右侧零件,B为左侧零件
节点2在x方向上的位移为零,因此u2x=0。由式(3)得到与u2x相关的因子A、B、D、H是相等的。
通过替换表2中相应的柔性因子,我们得到了以未知数的形式表示的u2x。因为节点8在x方向的位移是零,得到u8x=0。由式(3)得到与u8x相关的因子A、B、D、H是相等的。通过替换表2中相应的柔性因子,我们得到了以未知数的形式表示的u8x。在节点2和节点8的旋转是零,因theta;2z= 0和theta;8z=0。将相应的柔度因子代入,得到用未知数表示的theta;2z和theta;8z。已知节点1的输入位移为30微米,因此u1y=30mu;m。与u1y相关的A、B、D和H因子是相等的。利用高斯-约当法,利用静力平衡方程,求解了5个方程和5个未知数,得到了节点11在x方向上的输出位移。因此,
u11x=302.3mu;m。 (8)
放大系数==10.0758。
根据洛本提乌斯方法,采用闭环闭合法和卡斯蒂利亚诺位移定理求解位移方程。该方法得到的位移放大量为10.0758,与有限元计算结果非常接近。
3.2夹持器左侧的运动合成
微夹持器的左侧由单级杠杆机构组成。图4b为微夹持器左侧等效模型。由于是单级放大,DA为
3.3有限元分析
对所设计的微爪进行了输出位移和应力的有限元分析。微夹持器的总体尺寸和所使用的两种弯曲铰链的尺寸详见图3。通过在微爪两侧输入30lm的输入位移进行有限元分析。有限元分析采用ANSYS工作台软件进行。由于Al-7075材料具有高回弹的柔度特性,因此采用了其材料性能。
左右两部分总变形的FE结果如图5所示。通过有限元分析,左右两部分位移分别为9.698和4.0323。进行等效应力分析,结果如图6所示。应力分析结果很好地说明了微夹持器在工作区的可行性。
图5变形结果
图6应力结果
对微夹持器的设计和分析同样考虑了圆铰链和矩形铰链。但这边讨论的结果较少。与圆形铰链相比,弯曲的圆角嵌条铰链具有更好的弯曲柔性,其弯曲应力大大降低,与圆形铰链相比,其应力降低了26.8%。与矩形柔性铰链相比,弯曲的圆角嵌条铰链右端DA比降低25.96和32.76%,左半部分的折射率降低幅度相似,分别为6.45和8.048

