
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
新型XYX-Theta精密工作台及其运动标定的几何方法
Ahmed Joubaie,Mohamer Slamani,Ilian A.Bonev
摘 要:空间精密定位设备通常基于并联机器人,但在平面定位方面,众所周知的串行结构几乎是工业上唯一可行的解决方案。并联机器人问题是大多数是耦合的,比串行机器人更难控制,而且工作空间小,本文提出了一种新的并联机器人,该机器人具有运动精确、部分解耦、工作空间较大等优点。这种并联机器人的新颖之处在于它能够利用不同运动机构的支撑来实现解耦状态。利用CMM对机器人的重复性进行了评估,并对其执行机构的实际导程误差进行了评估。提出了一种利用FARO Technologies的测量臂直接识别实际基底和移动参考帧、两个执行器偏移量和一个距离参数的简单几何方法。虽然这种方法不是最有效的,但它在不需要任何机器人标定背景的情况下,对机器人的精度有了令人满意的提高。实验验证表明,在约150mmtimes;200mm的工作空间内,标定的位置精度优于0.339mm。
关键词:并联机器人;标定;精度评估;重复性
1 引言
并联机器人通常比串行机器人更精确,因为它们没有错误积累。虽然这在理论上可能是正确的[1],但真正的原因是可以将并联机器人设计得更坚固而不笨重。
空间精度定位装置通常基于六角架(如PI和ALIO Industries制造的六角架)或三脚架(如MICOS制造的SpaceFAB)。但是,当涉及到平面三自由度(3-DOF)定位时,几乎所有商业上所谓的XY-Theta定位台都是基于图1所示的著名的三明治结构。这种串行配置的优点是运动控制简单。但是,“串行”意味着第一个执行器必须支持所有其他执行器的重量。因此,该装置不仅要足够大以支撑自身,还要能吸收由电动机引起的任何振动。这意味着这样的设备将是相对较大且缓慢的。
平面并联机器人受到了广泛的关注[2],但很少用于工业领域。大多数基于平面并联机器人的精密定位原型依赖于柔性的使用[3,4]。但是,此类机器人的工作空间占比非常有限,不能替代图1中的XY-Theta。
在少数几个不使用弯曲的平面3-DOF并联机器人原型中,有一个基于对称的3-PRP1体系结构[5],其中基本执行器形成等边三角形,平台线性导轨形成星形。但是,该机器人的工作空间非常有限。相比之下,在3-RRP机器人的出现[6]、研究[7]、报道[8]中,除了在垂直方向上具有优异的刚度外,还提供了无限的旋转。但是,这种机器人的可达到的精度值得怀疑,因为它依赖于完美的圆形轨道的使用。
唯一商用的XY-Theta平行定位台是由Hephaist Seiko和其他至少两家日本公司制造的,如图2所示。该机器人也基于3-PRP架构,但其设计是不对称的。最终的定位台非常坚固,因为其移动平台直接在三个线性导轨的顶部滑动。不幸的是,这种设计是高度耦合的,这意味着要向特定的方向移动,三个执行器必须相互配合工作。此外,其工作空间受到严格限制[9]。
图1 串行XY-Theta定位台(由Newport Corp提供)
图2 NAF3对准台(由Hephaist Seiko Co.,Ltd提供)
本文首次提出了一种新型专利XY-Theta并行架构[10]的原型,即PreXYT,该机器人具有部分解耦、各方向刚性、工作空间较大等特点,并提出了一种用于机器人运动学校准的几何程序。特别是,第2节简要回顾了PreXYT[9]的运动分析,但以更一般的方式进行。第3节讨论了实际的原型,第4节介绍了使用CMM(坐标测量机)评估原型的可重复性的结果。第5节简要介绍了使用相同的CMM对所有三个执行器的超前误差的识别。第6节描述了基于测量臂的建议校准程序。第7节介绍了提高精度的结果。最后,第8节提供了结论。
2 运动分析
2.1 运动学正反分析
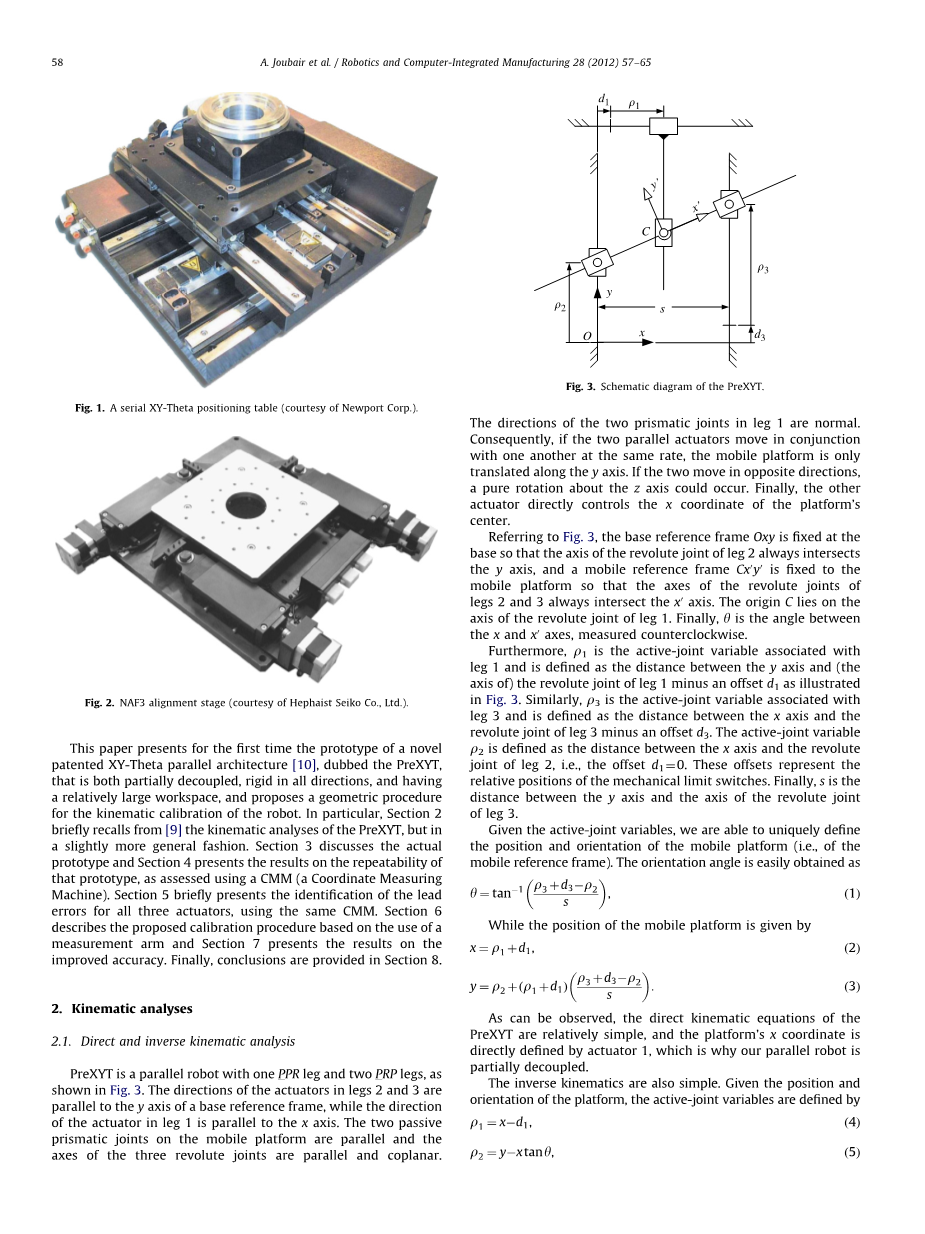
PreXYT是一个具有一条PPR腿和两条PRP腿的并联机器人,如图3所示。支腿2和3中的执行机构的方向平行于基本参考系的y轴,而支腿1中的执行机构的方向平行于x轴。移动平台上的两个被动棱柱形关节是平行的,三个旋转关节的轴是平行共面的。腿1中两个棱柱形接头的方向是正常的。因此,如果两个并行驱动器以相同的速度相互联动,则移动平台仅沿y轴平移。如果两者沿相反方向移动,则会绕z轴旋转。最后,另一个执行器直接控制平台中心的x坐标。
图3 PreXYT示意图
如图3,将基本参考系Oxy固定在基座上,以使腿2的旋转关节的轴始终与y轴相交,并且将移动参考系Cx′y′固定在移动平台上,腿2和腿3的旋转关节的轴线始终与x′轴线相交。原点C位于腿1的旋转关节的轴线上。最后,theta;是x轴与x′轴之间的角度,逆时针测量。
此外rho;1是与腿1相关的活动关节变量,定义为腿1的y轴与(该轴)转动关节之间的距离减去图3所示的偏移d1。同样rho;3是与腿3相关的活动关节变量,定义为x轴与腿3的转动关节之间的距离减去偏移量d3。活动关节变量rho;2定义为x轴与腿2的旋转轴之间的距离,即偏移量d1=0。这些偏移量表示机械限位开关的相对位置。最后s是y轴与腿3的旋转轴之间的距离。
给定活动关节变量,我们能够唯一地定义移动平台(即移动参考系)的位置和方向。定向角很容易获得。
(1)
移动平台的位置由以下给出:
(2)
(3)
可以看出,PreXYT的直接运动学方程相对简单,平台的x坐标由执行器1直接定义,这就是并联机器人部分解耦的原因。
逆运动学也很简单。给定平台的位置和方向,活动关节变量定位为:
(4)
(5)
(6)
最后,很明显,PreXYT没有任何奇异点。
2.2 工作区分析
所谓的恒定方向工作空间是平台中心C在给定执行器限制(rho;1max,rho;2max,rho;3max)的情况下,对于平台的固定方向可获得的一组位置,如图4所示。其中给定方向的恒向工作空间是阴影部分。PreXYT的恒定方向工作空间由平行于x′轴并穿过执行器2和3的极限的两天线和平行于y轴并穿过执行器1的极限的两天线界定。显然,方向越大,恒定方向的工作空间就越小。
图4 PreXYT的恒定方向工作空间
一个更有意义的工作空间子集将是平台中心C在给定间隔内所有可能方向的位置集合。在PreXYT中,该工作空间具有六边形的形式,可以通过和找到恒定方向的工作空间的交点来轻松计算。
3 原型
如图5所示,PreXYT的原型已经在巴黎高等技术学院建造完成。它包括三个LinTech的螺杆驱动线性导轨:两个130系列,一个100系列。两个130系列直线导轨中的每一个都有一个枢轴块,该枢轴块通过深沟单列轴承连接到滑架。钢轴牢固地连接到两个枢轴块之一,并通过简单的线性滚珠轴承固定到另一个枢轴块。这是对图3中原始设计的重要修改,同时对PreXYT的运动学模型没有影响,不仅实现起来更简单,而且消除了机器人一侧的往复杆,从而使设备更加紧凑。可移动平台通过一对相同的线性球轴承沿杆滑动。辊式单轨导轨的托架安装在LinTech 100系列线性导轨的托架上,因此两个导轨是垂直的。单轨导轨固定在锥形块上,该锥形块上装有一个大的深沟双列球轴承,该轴承附接到移动平台上。
图5 用三坐标测量机测量PreXYT重复性的实验装置
LinTech 100系列直线导轨具有更宽的托架和更高的负载能力(576Nm的力矩,而130系列的是38Nm),从而最大程度地减少了移动平台位于单轨导轨(支腿1中的被动棱镜接头)的最末端时的挠度。总而言之,这个机械设计在各个方向,特别是z方向上,都提供了很高的刚度,从而产生很大的负载能力。
100系列和两个130系列线性导轨通过机械限位开关,行程长度分别限制在170mm和300mm左右。距离s(图3)约为394mm。结果,移动平台可以旋转plusmn;35°,并在0°时在170mmtimes;300mm的矩形内平移。或者,参考上一节中定义的更实际的工作区子集,可以以任何方向获得一组位置在-17°到17°之间的至少一个直径为170mm的圆。为了进行比较,移动平台约为160mmtimes;16mm,底板为47mmtimes;510mm。
直线导轨的电机是CMC BNL 2310无刷伺服电机,产生的最大连续扭矩小于0.7Nm。不使用齿轮箱,因为直线导轨使用Acme精度为5.080mm(0.2英寸)的滚珠丝杠,规定的最大导程误差为50mu;m/300mm,零间隙,双向重复性为5mu;m。
我们不使用线性绝对编码器,而仅使用增量式编码器集成到电动机中。它们的分辨率是8000脉冲每转,相当于大约0.6mu;m的线性解析度。显然,这已经足够了,因为线性导轨的重复精度为5mu;m。此外,当为每一个执行器复位时,我们同时使用机械限位开关和索引脉冲。
最后,我们使用了Galil的AMP-20540四轴驱动模块和DMC-2133四轴控制器。我们将它们与带触摸屏的UniOp HMI设备连接起来,并将所有这些组件放入桌面机架柜中(未在图5)。
现有组件的成本约为15000美元。内部估计的加工,组装,布线和编程成本无法估算。
4 位置重复性评估
我们担心使用相对低成本的组件会损害平均可重复性。尽管如此,我们还是使用了最好的设备,在24℃的恒温下进行了所有的测量,在移动平台的角部固定四个工具球(但仅使用一个)。没有关于这些球的球形度的数据,但是他们的制造商说明数据为6.35mmplusmn;75mu;m。我们使用了Mitutoyo Bright-STRATO 7106 CMM,如图5所示。其最新的证书表明在2sigma;处总测量不确定度为2.7mu;m。此外,我们通过对(固定)移动平台上的三个工具球的30次测量来测试CMM的重复性。最坏的重复性,使用Eqs.计算(7-10),优于1.4mu;m(3sigma;)。
目前还没有测量并联机器人重复性的标准程序。最好的方法是找出重复性最差的。作者[12,13]根据机床性能测试标准[14]中列出的程序,使用激光干涉仪来测量并联运动学机器的定位误差。然而,由于我们的设备更倾向于作为机器人使用,我们决定根据IOS 9283 规范[15](用于工业机器人)使用以下程序,它由连接五个测量动作(P1,P2,hellip;,P5)的轨迹组成,并重复了30次,如图6所示,该动作在测量动作P1处引起磁滞效应。
图6 测量位置重复性的顺序(不按比例)
动作重复性表示重复n次后所获得的动作之间的一致性[15],我们的程序将同时测量单向重复性(P2,P3,P4,P5)和多向重复性(P1)。最后,由于我们仅测量来自移动平台的一个点(工具球的中心)的坐标,因此实际上评估的是位置重复性,而不是动作重复性。另外,移动平台的方向保持在0°,所有位移以0.4m/s的恒定速度制成,并且没有有效载荷。我们在移动平台的不同方向上执行了类似的测试,并且还测量了多个位置上的方向可重复性。但是,对这些测量结果
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[235653],资料为PDF文档或Word文档,PDF文档可免费转换为Word

