
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
武
基于高速开关阀的压力伺服控制的飞机防滑制动控制
Ruonan Tian, Zongxia Jiao, Kejian Huang, Xiaochao Liu, and Guanghui Jing.
摘 要:为了优化无人机目前的制动系统,本文提出在一个新的飞机防滑制动系统的基础上,利用压力伺服控制高速开关阀的PWM信号进行驱动。详细分析了PWM开关阀的工作原理,论证了压力伺服控制。制动控制器包含压力和滑移率两个闭环以便实现精确控制和提供高稳定性。实验结果表明,新系统确实提高了制动性能和效率。
关键词:飞机防滑制动;压力伺服控制;高速开关阀;PWM
1引言
制动系统是飞机的重要子系统,在制动过程中消耗飞机的动能,从而缩短制动距离,防止车轮磨损过大[ 1 ]。制动系统作为一种重要的机载系统,对飞机起飞和着陆的安全性有着重要的影响,使飞机的大部分制动能得到改善。传统的液压制动系统目前广泛使用,主要是由于其高频率响应性能,大负载刚度,高功率密度和技术成熟度[ 2 ]。
由于轮胎的非线性特性和路面附着性,在飞机制动过程中可能会发生轮胎打滑或抱死现象,可能导致车轮严重断裂磨损和穿刺事故[ 3 ]。为了避免此类现象的发生,已成为飞机防滑制动控制的必要功能。防滑控制方法判断SKID通常是通过监测车轮的状态,并调整制动压力,以确保车轮不在打滑状态。该方法可以保证制动过程的安全性同时提高效率[ 4 ]。
为满足实际应用中的一些工程要求,本文对某型无人机制动系统进行了研究,分析了其原理和控制方法。这种无人机的制动系统由板载液压源、减压阀、开关信号、制动执行机构和制动盘驱动的三通开关阀组成,制动压力由开/关阀控制。作为一种新型的电液转换器,开/关阀利用电磁铁和弹簧的力量吸力,使阀芯向前和反向,使流体的流动可以控制[ 5 ]。在制动过程中,飞行控制器通过监测和判断统计车轮的状态,将“0”和“1”命令信号传递给阀门从而建立和消除制动压力。这种控制方法虽然有效,但也会带来一些问题。在这个系统中,一旦电流滑移率高于期望值,通过释放制动压力就能轻松地避免轮胎打滑和锁定现象。但在这一过程中,如果制动压力持续重复跳跃和跌落,飞机受到震动,那么制动性能相对较差。此外,在这种控制方法中,车轮不可能获得足够的制动,从而导致较长的制动距离和较低的制动效率。
为了解决这些问题,本文提出了一种基于压力伺服控制的高速开关阀的飞机防滑制动系统。在这个新的制动系统,制动压力由两个双向高速开关阀控制。其中一个用作进油阀,另一个是出油阀。在传统的液压伺服控制系统中,比例阀或伺服阀更容易被选择,因为它们非常适合于连续可变操作。然而,他们对污染很敏感,因此基于伺服阀的液压系统必须要求高压进水过滤和定期维护[ 6 ]。除了维护费用高,不可忽视的一个缺点是泄漏,在理论上泄露是不可避免的[ 7 ]。因此,越来越多的液压伺服系统趋向于选择具有成本低、体积小、控制简单和鲁棒性污染等优点的开/关电磁阀。与传统的开/关电磁阀相比,由脉宽调制信号驱动的高速开关阀明显改善了其频率响应特性[ 8,9 ]。因此,它们能进行伺服控制。在新型制动系统中,利用两个高速开关阀实现制动压力的伺服控制,设计并制作了基于单片机和驱动电路的制动控制器。压力传感器安装在制动执行器中,将压力信号传递给制动控制器,使压力闭环控制,同时安装轮回实时滑移率的速度传感器实现补偿滑差闭环控制。双闭环控制不仅有效地提高了制动系统的制动性能和可靠性,而且提高了制动效率。
在本文中,一种新的由PWM信号驱动,基于压力伺服控制的高速开关阀的飞机防滑制动系统提出了一种无人机制动系统的优化方法。这种新的系统可以提高制动性能,同时提高制动效率。本文的其余部分如下:部分介绍了两个系统的体系结构,并比较了两种不同的控制方式。其次,给出了PWM高速开关阀的基本结构和工作原理,证明了压力伺服控制的可行性。在某一节中,通过介绍一个简化飞机模型,推导出期望滑移率估计。实验装置设置和所得到的结果被呈现在这一节。结论部分总结了所提出的制动控制策略的特点。
2两种制动系统
(1)电流制动系统
目前的制动系统包括车载液压压力源、减压阀、三通开关阀、制动器和制动盘。机载液压源提供电源的整个系统,而减压阀被用于将油压从21MPa 降到6MPa。这就是这个大尺寸的阀是传统一般为20HZ~ 30HZ 的低频率的响应开关阀的原因。因此,他们只能使油路“开”或“关”,但无法连续调整制动压力。正因为如此,减压阀在本系统中是必不可少的。
当前制动系统的结构如图1所示。
图1电流制动系统的体系结构
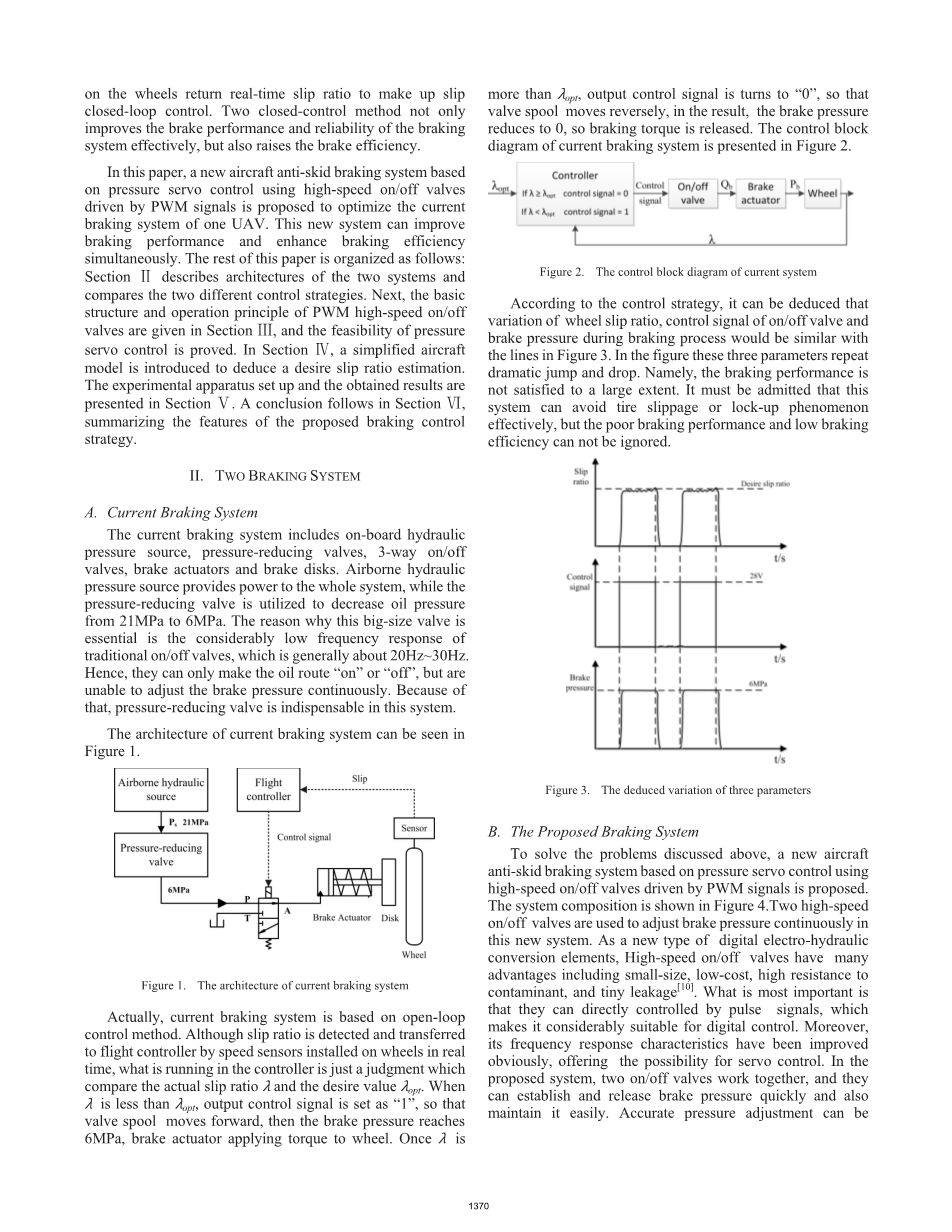
事实上,目前的制动系统是基于开环控制方法。虽然滑移率检测和转移到飞行控制器的速度传感器安装在实时车轮,在控制器的运行仅仅是判断比较实际滑移率和理想值。当小于,输出控制信号设置为“1”,使阀芯向前移动,然后刹车压力达到6MP,制动器施加扭矩的车轮。一旦超过,输出控制信号变为“0”,使阀芯反向,在结果中,制动压力降低到0,所以制动扭矩释放。电流制动系统控制框图如图2所示。
图2电流系统控制框图
根据控制方式,可以推导出制动过程中车轮滑移率、开断控制信号和制动压力的变化曲线与图3中的曲线相似。在图中这三个参数重复戏剧性的跳跃和下降。即制动性能在很大程度上不令人满意。必须承认,该系统可以有效地避免轮胎打滑或抱死现象,但不能忽视其制动性能差,制动效率低。
图3三个参数的推断变化
(2)建议的制动系统
为了解决上述问题,一种新的飞机防滑制动系统的基础上,利用压力伺服控制高速开关阀的PWM信号驱动方法。该系统的组成如图4所示,在这个新的系统,两个高速开关阀用于不断地调节制动压力。作为一种新型的数字式电液转换元件,高速开/关阀有许多优点:体积小、成本低、抗污染、微小泄漏[ 10 ]。最重要的是他们可以直接控制脉冲信号,这使得它非常适合于数字控制。此外,它的频率响应特性得到了明显的改善,也为伺服控制提供了可能性。在建议的系统中,两个开/关阀一起工作,他们可以很快的建立和释放制动压力,也很容易维护。如果引入微分控制方法,精确的压力调节就能被实现。因此,不再需要减压阀。
图4建议制动系统的体系结构
在新的系统中,压力传感器和速度传感器被安装来检测压力和速度的变化,并将实时数据传输到制动控制器。制动控制器的设计和制造源于STM32系列微控制器。控制方式包含两个闭环。制动压力闭环为内环,而外环为滑移比闭环。控制框图如图5所示。
图5建议系统的控制框图
3 PWM开关阀的工作原理
依靠高速开关阀的压力伺服控制的性能对防滑制动系统的性能有直接的影响。高速开关阀是一种流体流动控制,由数字信号驱动的元件[ 11 ]。其输入控制信号为脉宽调制信号,可使阀芯重复连续切换动作,进而产生一系列流体流动的脉冲占空比f。据此,调整输入脉冲的占空比能够实现制动压力的比例调节。
(1)动态切换特性
开/关阀的内部结构如图6所示[ 12 ]其主要工作原理是由电磁铁产生控制吸力,使阀芯在高速下向前和反向[ 13 ]。根据电磁原理,在线圈上施加脉宽为TH的脉冲电压时,能产生成比例的电磁力。一旦力大于小说和流体力的总和,阀芯开始移动。由于阀芯运动,线圈电感发生变化,电流随之波动。
图6开/关阀的内部结构
由于电磁铁的响应速度和阀芯的运动时间,在脉冲信号和实际阀芯位移之间有一个不可避免的延迟。假设阀芯在阀芯被拖动和释放过程中线性变化,阀门的开闭时间分别由两部分组成,方程如下:
(1)
这里的t1和t3分别表示电枢驱动和释放延迟时间,t2和t4则分别表示阀芯动作的时间成本(正向和反向)。启闭时间与阀门的固定特性和流体流动有关。t1和t3主要由阀的电磁特性决定的,而t2和t4取决于流体和阀门结构的特点[ 14 ]。在切换过程中,线圈中电流i和阀芯位移的关系如图7所示。
图7脉冲信号、线圈电流与阀芯位移的关系
从上图可以看出线圈电流经历了复杂的变化,而阀芯位移呈现相对简单的规律。一个完整的切换过程可以分为5个阶段,表示成函数[ 15 ]:
(2)
T是脉冲信号的周期,是高脉宽。
(2)流动特性
如果连续的脉冲信号对电磁线圈施加的,各个时期的油路将与和流体流量有关。和T的商数被定义为占空比。一般情况下,高速开关阀的静态流量特性通过平均流速Q和输入脉冲信号的占空比来描述,比如:
在这里,是阀门全开时的最大流量。是开/关阀流量系数。是阀的最大开启面积,∆P是气压差,rho;是油的密度。根据方程(3),可以通过调节PWM信号占空比来不断控制平均流量。如图4所示,两个开/关阀共同控制执行器的流体流入和流出。对于制动器,由于排量小,活塞的动态运动过程可以忽略,所以制动压力Pb表示为[ 16 ]:
在公式(5)和(6)中,是驱动腔的容积,是流体弹性模量。是活塞面积,是刹车盘的等效刚度。是执行器入口流量。
采用PWM信号可连续调节执行器入口流量,因此制动压力伺服控制合理且可行。
4飞机模型与期望的滑移率
在这一部分中,建立了一个简化的飞机模型。本文仅考虑一个车轮的运动。在这一部分中,建立了一个简化的飞机模型。本文仅仅考虑一个轮子的运动。构建出一个简单而有效的飞机地面运动模型。
虽然模型很简单,但它保留了实际系统的本质特性,如图8所示。该模型包括飞机纵向动力学公式和主轮动力学公式如下:
(7)
制动系统的动力学行为主要取决于与飞机纵向速度、车轮角速度、车轮垂直载荷和跑道特性之间存在非线性关系的轮轨之间的摩擦力[ 17 ]。
图8简化飞机地面运动模型
事实上,飞机的制动功能主要取决于轮胎和地面之间的摩擦力。摩擦模型包括物理模型和经验模型。经验模型使用简单,但精度较低。与此相反,物理模型的精度更高,但它们使用起来更复杂。在本文中,一个典型的经验“魔术公式”摩擦模型被用来描述摩擦特性[ 18 ],正如:
(8)
B,C,D和E是曲线拟合系数,通常与地面性能,轮胎特性和支承力有关。是滑移率,定义为车轮轴速度和轧制线速度之间的相对差异,表示为:
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[137797],资料为PDF文档或Word文档,PDF文档可免费转换为Word

