英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
采用精确机器人技术和模块化纤维定位头的增强型机器人自动化纤维放置
凯尔A.杰弗里斯Electroimpact Inc.
摘要
将精确铰接机器人系统与模块化自动光纤放置(AFP)头相结合,机器人自动放置纤维的过程得到了加强。精确的机器人系统由一个直线轴上的现成6轴KUKA Titan KR1000L750组成,并可选择额外的部件旋转轴。每个机器人轴都使用辅助位置编码器进行增强。模块化纤维放置头部特征是一个机器人刀具更换器,可以快速更换加工头和机载纱架。快速更换纤维放置头和简化的拖曳路径可实现出色的工艺可靠性和灵活性,同时允许脱模准备工作。该系统由一台西门子840Dsl CNC控制,可处理所有的过程功能,机器人运动,并执行由Electroimpact开发的软件技术,实现卓越的定位精度,包括利用高阶运动学模型的增强型运动学。使用CGTech VERICUT复合编程和VERICUT复合模拟进行零件编程和仿真。这种技术组合使得系统具有较高的路径精度和工艺灵活性,且成本比传统的纤维铺放机低。
介绍
Electroimpact在多年的时间内开发了精确的机器人技术和模块化自动化纤维放置末端执行器。通过在多个生产应用中使用这些技术,每种技术都已经成熟。最近Electroimpact将他们正在申请专利的精确机器人技术与其模块化自动化纤维贴装头技术相结合。这种独特的组合产生了一种低成本的自动化纤维铺放解决方案,可用于各种CFRP部件。
主要部分
工业机器人被用于许多要求中等水平的准确性和可重复性应用中。 这些应用程序包括拾取和放置,灯光组装,和焊接。传统上,由于对高定位的要求,铰接工业机器人的低精度已经妨碍了其在许多航空航天应用中的使用准确性。Electroimpact开发了一系列用于航空航天应用的精确工业机器人。大多数精确机器人的应用涉及航空航天结构的钻孔和固定。
为了获得更高的精确度,在靠近输出端的每个机器人旋转轴上安装电光编码器。编码器信号被输入到一个工业CNC(西门子840Dsl)中,该工业CNC能够根据光学尺度二次反馈控制每个轴,而不是伺服电机的主反馈。
Electroimpact还开发了一个高阶运动学模型,以实现刀尖位置的高精度补偿。该运动补偿软件也在Siemens 840Dsl CNC上执行。光学编码器和软件运动补偿的组合使得可以校正由于传动系偏移,传动系间隙,有效载荷引起的偏转以及过程力输入引起的偏转而引起的位置不准确。二次反馈也有效地加强了机器人,因为它允许CNC对由于静态施加的力或在路径运动期间动态施加的力引起的位置不准确性作出反应。
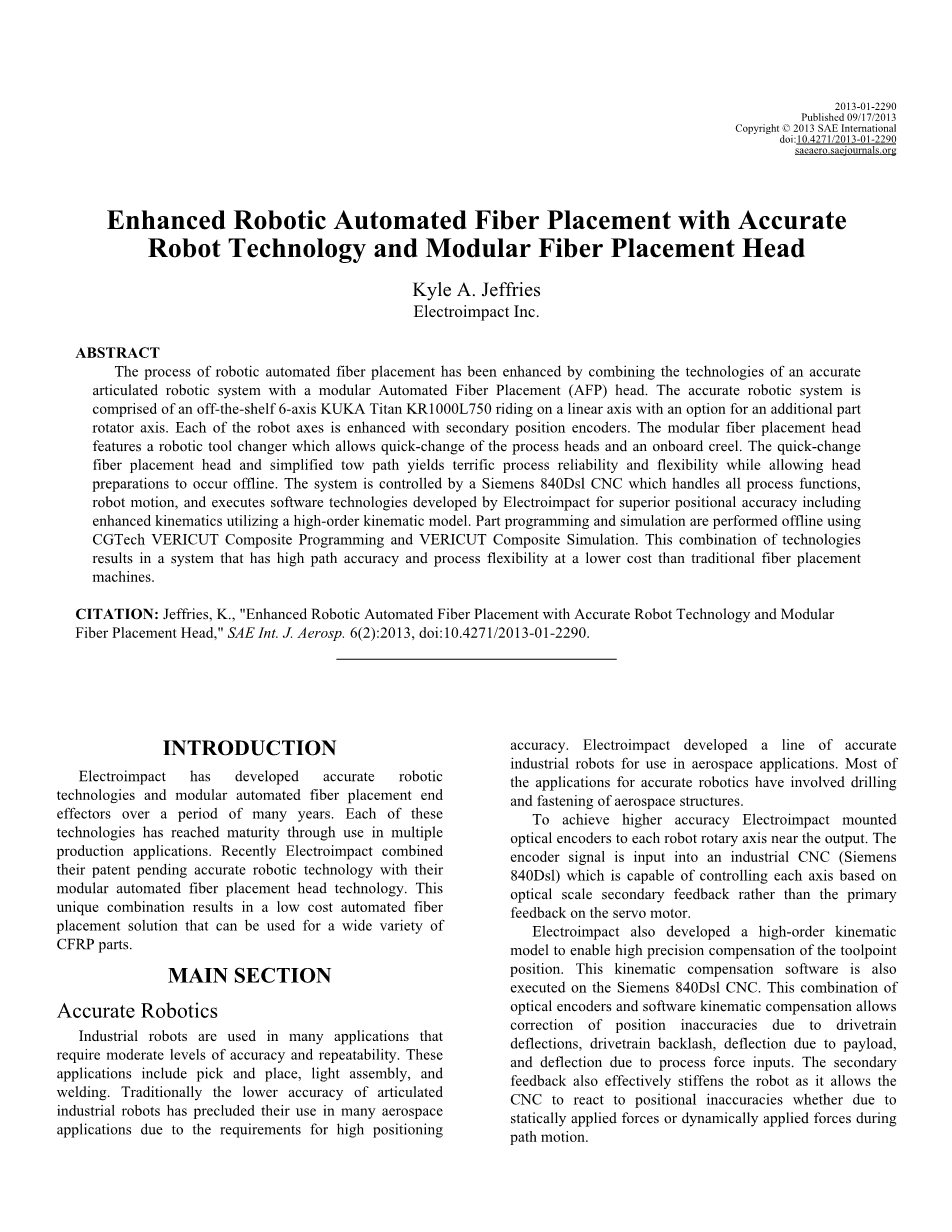
通过分析精确的机器人末端执行器在典型工件上钻孔的模式,证明了刀尖定位精度的提高。检查平行于表面的孔的径向位置偏差。使用标准工业机器人(非精确,无二次反馈)在3240times;220毫米(0.71平方米)的区域上钻出56个孔的图案。该系统展示了 /-0.45mm的3西格玛孔模式精度。然后使用精确的机器人(带二次反馈)在1400times;840毫米(1.18平方米)的区域内钻出64个孔的图案。得到的三西格玛精度为 /-0.08毫米,在使用精确的机器人技术时,最终证明了刀具点定位精度的提高(请参阅图1)[8].图1.标准机器人与精确(增强)机器人的精度比较。
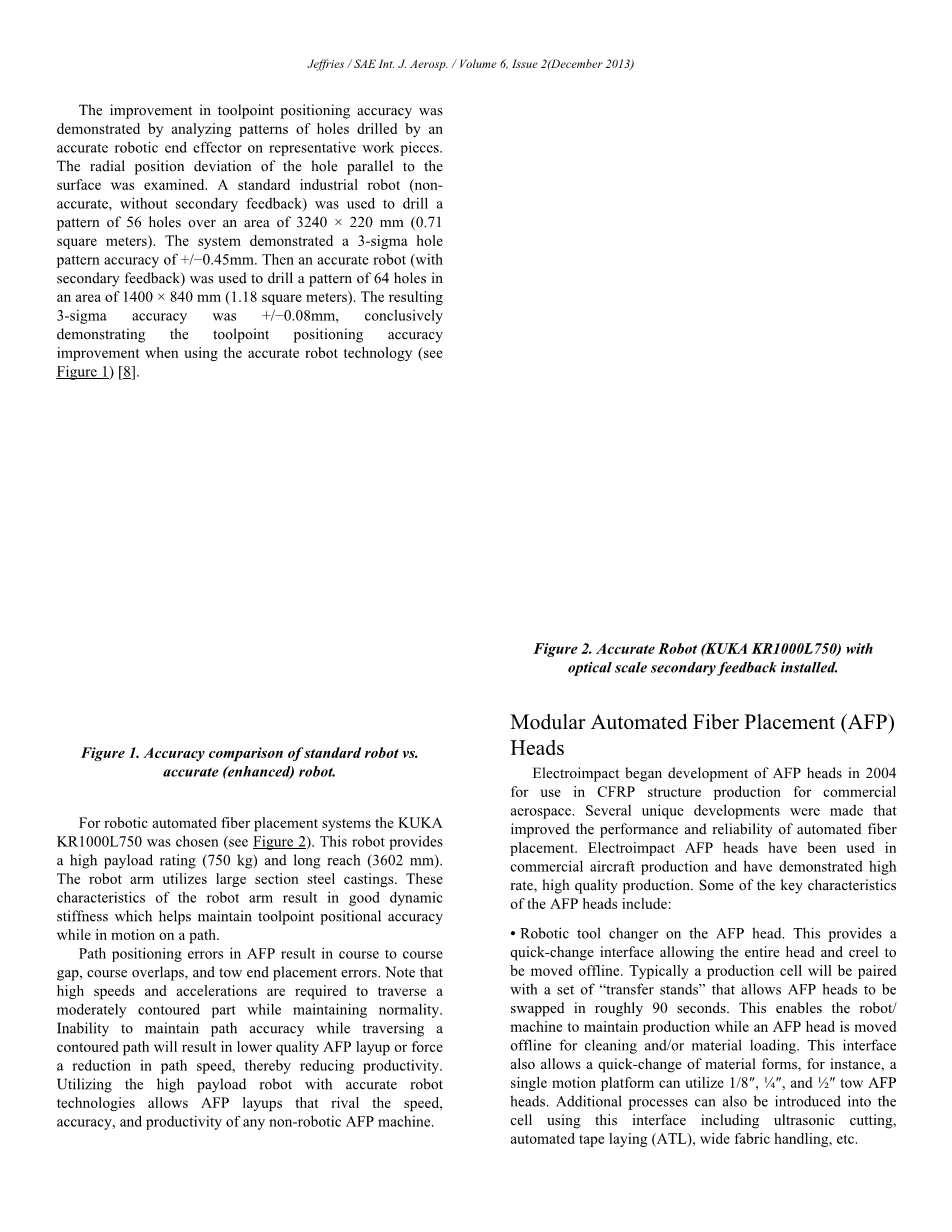
对于机器人自动化纤维铺放系统,选择了库卡KR1000L750(参见图2)。该机器人提供高有效载荷(750 kg)和长距离(3602 mm)。机器人手臂采用大型钢铸件。机器人手臂的这些特性导致良好的动态刚度,有助于在路径上运动时保持刀具点位置精度。
AFP中的路径定位错误会导致过程间隙,过程重叠和两端结果错位。请注意,在保持正常性的同时,需要较高的速度和加速度来穿过中等轮廓的零件。无法在穿越波形路径时保持路径精度会导致AFP层叠质量下降或强制降低路径速度,从而降低生产力。利用具有精确机器人技术的高效载荷机器人,AFP绞合可以与任何非机器人AFP机器的速度,准确性和生产力相媲美。
Electroimpact于2004年开始开发AFP磁头,用于商业航空航天的CFRP结构生产。几项独特的发展提高了自动化纤维铺放的性能和可靠性。Electroimpact AFP磁头已用于商用飞机的生产,并已证明高速率,高质量的生产。AFP关键的一些主要特征包括:AFP头上的机器人工具更换器。这提供了一个快速更换的借口,可以让整个头部和纱架脱机。通常情况下,生产单元将与一组“转移支架”配对,使得AFP磁头在大约90秒内交换。这使得机器人/机器能够在AFP机头脱机进行清洁和/或物料装载时保持生产。这个接口还可以快速更换材料形式,例如,一个运动平台可以使用1/8“,frac14;”和frac12;“的AFP头。还可以使用此接口将附加工艺引入电池,包括超声波切割,自动铺带(ATL),宽幅织物处理等。
船上的筒子架。拖车硬件处理过程的每一部分都在快速更换的AFP头上。
bull;短而简单的拖曳路径。简单的短拖曳路径将重定向次数降至最低,并可缩短穿线时间,消除零件上的丝束扭曲,并消除裂缝带束层重叠-拼接破损。
bull;无需工具即可访问需要清洁的区域。偏心凸轮闩锁用于固定切割,进给和夹紧模块。加热器保持弹簧加载快速释放闩锁。
bull;简化张力系统。张力系统被有效地控制以防止筒子架中的松弛丝束。
bull;高速添加并快速切入。促动器设计用于允许高速拖车添加和切割,而无需停止或减慢刀具路径运动
机器人轴6改进
Electroimpact AFP机器通常设计为侧重于用于AFP路径转向的最后一个定向轴(通常称为“C”轴)的性能。在许多碳纤维复合材料上下料中,执行双向上升以减少偏离部分的运动是有利的,这导致更高的生产率。一个典型的双向层将由一系列平行线组成。AFP头会沿一个方向穿过一个方向,然后从部件上抬起,旋转180度,接触零件,然后在平行的相邻路线上沿相反方向移动。为了优化这种外部速度和灵活性,有两种策略用过的。第一个策略是最大化转向轴的性能(加速度和速度)。第二种策略是将滑环用于通过转向轴的电气和气动连接,以使“连续”轴不受行程限制。这个连续的转向轴在其整个范围内几乎没有硬件或软件限制。由于AFP头上装有经轴架,因此不存在由于光纤布线和扭曲导致的转向轴限制。由于AFP头可以在任何方向转向,因此可实现最大的生产灵活性。
工业机器人手臂本身不具有高性能的最后轴或连续的最后轴。轴6由安装在轴3附近的电机驱动,并利用一系列驱动轴和锥齿轮到达机器人臂的末端。KR1000L750上的轴4和轴6是机械连续的,但是当电气布线和气动线沿着臂布线并连接到末端执行器强制限制这些轴。
Electroimpact针对工业机器人的这些限制开发了一种解决方案。改进包括拆除机器人手臂末端的轴6齿轮箱和轴6传动系统的一部分。这些组件被替换为定制驱动包,其中包括电机,齿轮减速器,皮带传动和交叉滚子轴承(请参阅图4)。定制驱动套件还包括用于电信号,电力和压缩空气的滑环。结果是工业机器人AFP应用的高加速度,高速度,连续转向轴。
机器人AFP传感器配置
Electroimpact提供了一个机器人AFP单元,其中包括一个大型真空台(16米times;2.5米)和一个超声波切割龙门架(请参阅图5, 6, 7, 8)。这个系统被用来产生法新社平面收费。AFP机器人能够上架带有光纤转向并且接近净形状的电荷。这样可以优化纤维方向并减少碳的浪费。超声波切割龙门架(带30KHz超声波喇叭)可以对AFP充电进行最终修剪,而不必将电荷转移到另一台机器上,因为机器人和龙门架都在同一个真空台上操作。细胞有2个转移架和2个AFP头(一个frac14;“拖曳和一个frac12;“丝束)。转移台为头部提供动力和压缩空气。这允许在头部脱机时完全头部功能用于穿线和清洁。
Electroimpact目前正在生产一种机器人AFP单元,该单元将用于制造用于太空发射的有效载荷整流器和有效载荷支撑结构(请参阅图9)。该单元包括一个能够产生6米直径times;20米长部分的旋转器。该单元还包括2个转移架和6个AFP头。AFP头配置1/8“丝束,frac14;”丝束和frac12;“丝束。该单元还包括一个投影激光系统的集成,该系统能够在两个会聚区域中投影叠层边界,航线中心线和编程的间隙/圈。
许多其他的传感器配置是可能的。图10和11展示一些应用准确的概念AFP机器人。图10显示了一个精确的机器人AFP系统,其中包括与垂直轴旋转器,水平轴旋转器和水平叠层台的集成。图11显示了一个单元概念,允许机器人访问多个零件/工作区域。这对包括结构芯,玻璃纤维和/或Kevlar层的混合CFRP结构可能是有用的。离线编程和模拟Electroimpact作为CGTech非独家合作伙伴开发用于复合应用的离线编程和仿真工具。使用CGTech VERICUT复合编程(VCP)软件执行精确机器人AFP系统的离线编程。VCP读入CAD曲面和层边界信息,并通过链接移动生成路径几何图形,然后输出NC程序。VERICUT复合仿真(VCS)软件可用于模拟NC程序。该模拟能够检测碰撞并验证材料应用。机器人安装在轨道轴上时,有多种可能的机器人姿态将达到所需的刀具位置和方向。VCP允许配置机器人姿态,VCS证明可用于验证机器人姿态是否最佳。图12显示使用VCS生成的精确机器人AFP仿真的屏幕截图。
发明内容/结论
精确的机器人技术与模块化AFP头的结合提供了一个灵活的平台,能够生产各种各样的碳纤维增强塑料部件,速度,质量和可靠性可与更大,更昂贵的AFP机器配置相媲美。工业机器人的低成本使得这一级别的AFP自动化对于AFP在过去不会被负担得起的许多应用来说是可以实现的。
自动化纤维布置引起的嵌入缺陷变刚度复合材料的优化
Mahdi Arian Nik,Kazem Fayazbakhsh,Damiano Pasini, Larry Lessard麦吉尔大学机械工程系
摘要
可变刚度复合层压板可以使用自动化纤维铺放(AFP)技术制造。通过在更有利于承载载荷的方向上调整其材料特性,可以实现结构性能的改进。然而,在AFP制造过程中,缺陷的形成,主要是缺口和重叠,是不可避免的。缺陷区的范围通常由两组参数控制:设计参数; 和制造参数。在这项工作中,我们研究了控制缺陷形成的参数如何影响多目标优化问题的最优解,其中平面内刚度和屈曲载荷同时最大化。据发现,增加路线内的牵引次数减少了路线宽度保持不变的缺陷区域的数量。此外,通过使用宽阔的路线,缺陷区域的数量显着减少,这具有增加与设计路径的偏差并减少可制造设计的数量的效果。结果表明,一个完整的差距战略转移无缺陷帕雷托前沿,没有考虑缺陷的影响,获得较低的面内刚度和屈曲载荷; 另一方面,完整的重叠策略将帕累托前沿转向更高的结构性质。
关键词:多目标优化缺陷,差距重叠,自动光纤布局
- 介绍
自动化纤维铺放(AFP)是一种制造技术,具有很强的灵活性,可用于制造具有各种结构几何形状和叠层铺层的复合层压板。具体而言,复杂的几何形状(例如双曲面)和具有可变刚度的非传统复合材料可以通过沿着帘布层内的优选曲线路径铺设纤维来生产。可变刚度层结构的结构优势是通过调整材料特性来实现的,这些材料的特性更有利于承载在层压板内载荷的方向。
使用曲线纤维改善复合材料层压板结构性能的优势已被广泛证明[1–6]。几项研究提出了最小化路径,使悬臂梁的柔度最小化[7],可以最大限度地发挥钢板的屈曲载荷[8],使混合复合材料壳体的屈曲载荷最大化[9]同时最大化屈曲载荷和平面内刚度[10]。这些作品是有前途的,因为它们展示了曲线路径可能产生的结构改进。然而,这些结果仅在理论上是最佳的,因为它们不考虑制造约束,例如最小车削AFP机器施加的转弯半径。因此,一些最佳解决方案可能无法制造。Alhajahmad等人。[11] 在搜索最佳路径时考虑了最小转弯半径,该最优路径最大化了承受压力和面内载荷的板的屈曲载荷。此外,Blom等人[12]获得了在纯弯曲载荷下最大化圆柱体的承载能力的波导路径。
上述工作假定层压板没有缺陷(忽略缺陷的存在)。然而,实际上,AFP机器用于制造具有曲线的层压板的方法通常导致以间隙和/或重叠的形式形成缺陷。在制造过程中,第一路线(一束丝束)沿着设计的路径铺设。随后,第一道路重复移动以覆盖整个层压板。如果路线宽度可以连续变化,那么层压板不会有任何缺陷。由于AFP机器可以通过增加或减少丝束仅改变路径宽度的离散值,因此在层压板内形成小的缺陷区域。三角形间隙和/或重叠通常出现在相邻的路线之间,AFP过程结果影响最终层压板的结构性能。有几种策略可以放弃拖曳。0%覆盖率(完全间隙)是一种策略,即在粗纤维束的一个边缘到达路线边界时立即放下粗纤维丝束;它产生没有纤维的小三角形区域,即间隙。另一种方法是100%覆盖率(完全重叠);在这里,当粗纤维的两个边缘穿过路线边界时,粗纤维落下,从而产生小面积的三角形重叠。中间情景是当覆盖率在0%和100%之间时[13]。上面解释的策略也可以用来添加粗纤维。制造没有任何间隙的层压制品的另一种策略是避免脱落丝束,这导致制造的层压制品内的大的重叠区域。这种策略被称为两重叠方法。
在文献中,对由AFP制造的变刚度层压板的机械性能的缺陷效应(主要是重叠)的研究引起了几位研究人员的关注。Wu等人[14]进行的实验表明,20层可变刚度面板的预先屈曲刚度比双层重叠的[plusmn;45]5S正交面层压板高27%,而有间隙的面板仅高出4%。洛佩斯等人。[15]研究了变刚度层压板的第一层失效载荷。他们发现Tatting和Guuml;rdal获得的最佳变刚度设计[13,16]完全缺口和牵引搭接策略分别使第一层失效负荷增加24.8%和33.9%。在另一个尝试中,洛佩斯等人。[17]进一步扩展了以前的结果,以说明累进损坏行为和最终结构性失效。结果表明,对于没有中心孔板的情况,最佳变刚度设计可以分别提高25.2%和41.2%的强度,完成间隙和牵引重叠策略。具有中心孔的板的强度增加为13.4%,完全缺口为55.4%,两个叠加策略为55.5%。应
全文共6266字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15452],资料为PDF文档或Word文档,PDF文档可免费转换为Word

