
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
使用GKYP引理的基于分布的鲁棒机电一体化的集成伺服-机械设计
摘 要
机电一体化的性能规格和鲁棒稳定性通常难以在使用低阶控制器的情况下同时实现。本文采用GKYP引理,提出了机械设备有限频率的重新设计的集成伺服机械设计算法。该设备是基于预先设计的低阶控制器而人工合成的,并且还包括了在高斯设备参数干扰时整个控制系统的鲁棒稳定性标准。仿真结果表明,该算法实现了在设备的相位稳定谐振模式下具有干扰抑制能力的高带宽控制系统,并且在低阶控制器下对于均匀设备参数扰动具有鲁棒稳定性。
关键词 分销;集成伺服机械;Kalman-yakubovic-popov;低阶控制器;鲁棒稳定性
- 引言
机电一体化是由pang等人所定义的,由机械技术、电子技术、信息技术和控制系统有机结合而形成的(2011)。如今,机电一体化已经广泛应用于各式各样的产品中,从硬盘驱动器(HDD)等的消费电子产品中到工业机器人等的工业设备中。机电一体化整体控制系统通常需要实现如高控制带宽和一直高频干扰等性能指标。除此之外,由于不同批次的同一机械系统的固有参数扰动,整个控制系统的鲁棒稳定性是另一个重要的标准。
机电一体化伺服机械设计的传统研发过程是一个循环过程,从机械结构的设计开始,然后是原型的制造和评估,然后和Pang等人所记录的那样将原型传递给控制工程师进行伺服系统设计和分析(2011)。 因此,所设计的机械设备通常不具备理想的控制特性。正如要在最低阶控制器达到所需的性能水平和鲁棒稳定性则高度依赖于装置设计,因此正如Ya-maguchi等人报道的那样,通常很难在使用低阶控制器的情况下同时实现机电一体化的性能规格和鲁棒稳定性(2011)。
在集成的伺服机械设计中,为了使用低阶控制器同时实现性能规格和鲁棒稳定性,除了控制器设计外,还进行了设备设计。
Zhou等人的mu;合成方法 (1996)是众所周知的用于控制系统的鲁棒稳定性的方法。为了克服与mu;-合成方法相关的计算复杂性高和过度高阶控制器的问题,鲁棒控制设计方法在诸如Sadeghzadeh等人(2011年)和Bhaattacharyya等人(1995)的作品中提出了。Bhaattacharyya等人的方法(1995)是以已知的相较于mu;合成方法减少了保守主义的Kharitonov(1978)中的Kharitonov定理为基础的。
继续我们在Tan等人的早期工作(2012),其中基于Iwasaki等人的广义Kalman-Yakubovic-Popov(GKYP)引理的集成伺服机械设计算法(2005)被提出用于机械设备的有限频率再设计,在本文中整个控制系统的鲁棒稳定性作为附加设计标准被包括在其中。 本文也将采用考虑高斯设备参数扰动的基于分布的方法。
2. 基于GKYP引理的伺服机械的整体设计
考虑到单输入、输出的机械设备的有限频率重新设计,因为数字控制器常用于机电一体化,所以提出了一种离散时间积分伺服机械设计算法。
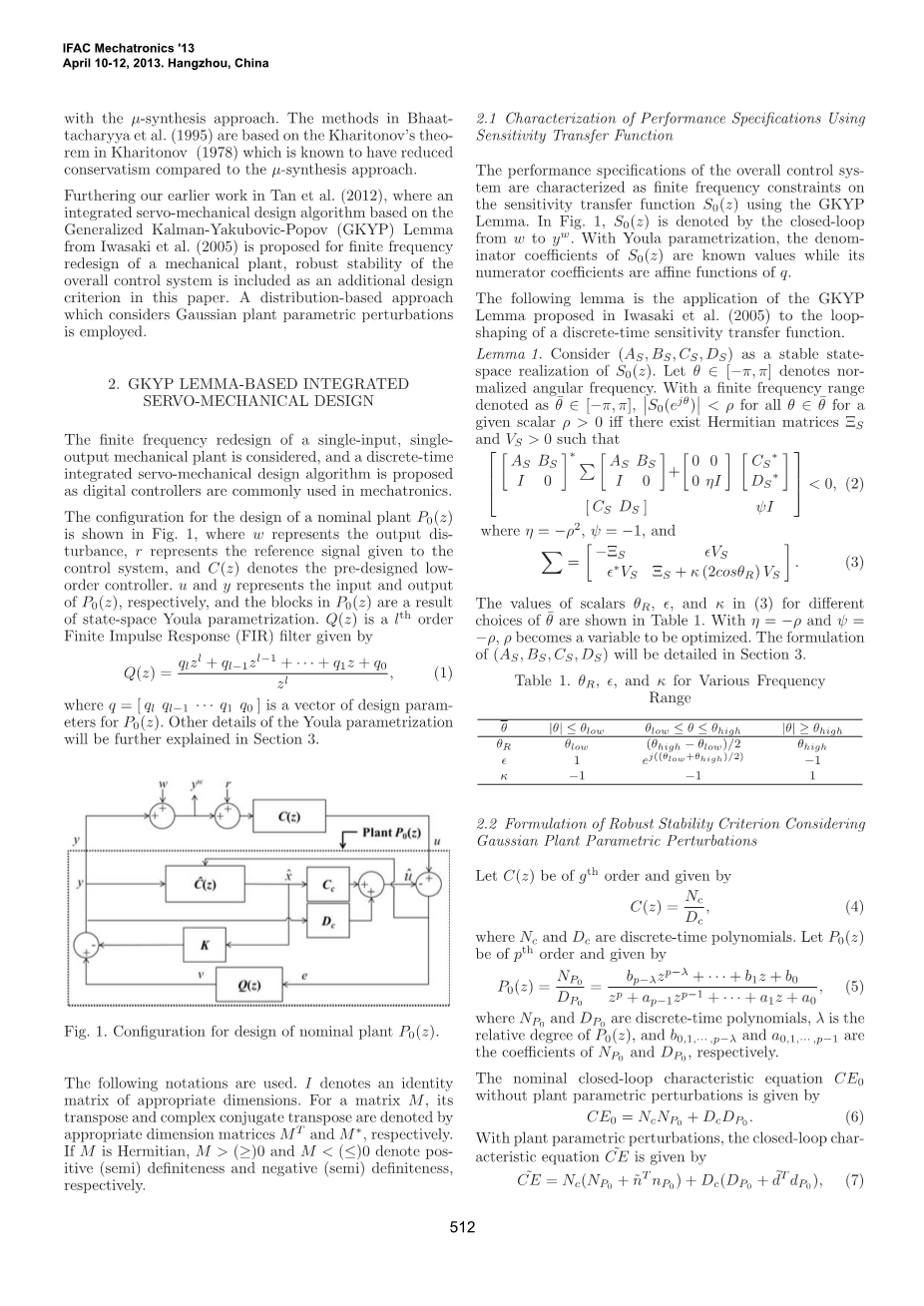
图1给出了公称设备的设计构造,其中w表示输出干扰,r表示给控制系统的参考信号,C(z)表示预先设计的低阶控制器。 u和y分别表示的输入和输出,中的块是状态空Youla参数化的结果。 Q(z)是由下式给出的第l阶有限脉冲响应(FIR)滤波器
其中q=[ql ql-1...q1 q0]是的设计参数向量。 Youla参数化的其他细节将在第3节中进一步解释。
Fig. 1. 公称设备的设计构造
使用以下符号。 I表示适当维度的单位矩阵。 对于矩阵M,其转置和复共轭转置分别由合适的维矩阵M T和M表示。 如果M是厄米特,Mgt;(ge;)0和M lt;(le;)0分别表示正(半)确定性和负(半)确定性。
2.1 使用灵敏度传递函数表示性能规格
整个控制系统的性能规格具有使用GKYP引理的灵敏度传递函数S0(z)的有限频率约束的特征。 在图1中,S0(z)由从w到yw的闭环表示。 在Youla参数化的情况下,S0(z)的denom-inator系数是已知值,而其分子系数是q的一个函数。
下面的引理是lwasaki等人引理提出的对离散时间灵敏度传递函数的回路成形的GKYP引理的应用(2005)。
引理1. 将(AS , BS , CS , DS )作为的稳定状态,令表示归一化的角频率。有限的频率范围记为,对于给定的标量的所有,如果存在厄米特矩阵和,则
其中eta;=-rho;2,psi;= -1,和
表1列出了在的不同选择情况下(3)中的标量,和的值。随着和,变为一个变量进行优化。(AS,BS,CS,DS)的公式将在第3节详细说明。
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
-1 |
|
|
-1 |
-1 |
1 |
Table 1. ,和的频率范围
2.2 考虑高斯参数扰动的鲁棒稳定性判据
令为阶,由下式给出
。
其中和是离散多项式。令为阶,由下式给出
其中和是离散时间多项式,是的相对程度,分别是和的的系数。
没有设备参数扰动的标称闭环特征方程由下式给出
存在设备参数扰动时,闭环特征方程由下式给出
其中和分别是由下式给出的随机向量
,对于,和
,对于。
和的元素根据给定的高斯分布而变化。除此之外,
和
令≜。将式(7)除以式(6)得
使用下式关系进行简化
正如Anderson等人所证明的那样,严格正实性条件(SPR)被用于评估鲁棒稳定性(1990)。对于一个给定的,如果对于所有的都存在,那么的根源将会是稳定的。
接下来的引理是Hitz等人的离散时间SPR引理(1969),这是GKPY引理的一个特例。
引理2. 将(AF,BF,CF,DF)作为的一个稳定状态空间实现。如果其中存在厄米特矩阵,就是SPR,那么
其中。
(AF,BF,CF,CF)的公式需要式(12)中的,和从图1所示的状态空间Youla参数化种获得。的传递函数有下式给出
其中如式(1)和图1所示。参考图1,令表示仅考虑输入和输出在没有的情况下的闭环。式(15)中的等同于图一中,,和所示的。因此,式(12)中的和可以分别从已形成的分母多项式和中获得。由于和,则可由下式给出
因此,等同于的分母多项式。这样,当其分子系数是的一个函数是,的分母系数便是已知值。的公式将在第3节中进一步阐述。
3. 设计算法
标称设备的集成伺服机械设计步骤如下:
步骤1:设计一个阶次为的状态空间实现的低阶控制器,用来补偿设备的低频特性。
步骤2:分别使用线性二次估计器(LQE)和线性平方调整器(LQR)估算观测值增益矩阵和反馈增益矩阵。观测值是的估计值。
步骤3:公式由下面给出
其中,同时表示在离散样本时的值。
步骤4:将设计为一个具有状态空间矩阵的1阶FIR滤波器,如下
将设为0,以使设计的设备不会有直接馈通,同时(5)中的由给出。的阶数由给出。
步骤5:获得下式给出的的状态空间矩阵
其中和分别是和的状态空间矩阵,在式(17)中使用得到。
步骤6:用式(2)形式的线性矩阵不等式(LMIs)在上指定约束。
步骤7:使用式(1)、(16)和(17)获得作为,其中是中设计参数的函数。使用式(1)、(16)和(17)获得作为。的状态空间矩阵是。
步骤8:对于和的每个元素,根据其给定的高斯分布选择个独立且相同分布(i.i.d.)的样本。这导致扰动的设备和LMIs以式(14)的形式出现。目标将会被最小化。
步骤9:获得的值并且制定标称设备的状态空间,由下式给出
步骤10:在存在给定的高斯装置参数扰动的情况下,整个控制系统的鲁棒稳定性不低于预期的,其中。
集成的伺服机械设计算法由图2所示的流程图进行总结。
图2.设计算法总结
4. 仿真示例
在本章节中,所提出的集成伺服机械设计被用于从一个商用3.5双级硬盘驱动器对铅锆钛(PZT)悬浮基架的二级制动器进行有限频率设计。其目的是使用低阶控制器同时实现整个控制系统的性能规格和鲁棒稳定性。
4.1 设计算法的应用
基于PZT悬浮基架的二级制动器的频率响应被测量和建模为在4.70kHz和13.5kHz具有两个主要的高频谐振模式。闭环采样频率选择为40kHz,并且初始设备模型的离散化的频率响应采用如图3所示的零阶保持器(ZOH)。根据算法的步骤1,预先设计一个使用匹配极点-零点转化器的一阶滞后补偿器,使得采用实现1.80kHz的开环交叉频率。由下式给出
其频率响应如图3所示。根据Kobayashi等人(2003)和Yamaguchi等人(2011)的说法,因为4.70kHz谐振模式既不是增益也不是相位稳定的,所以整个控制系统是不稳定的。
在算法的步骤2种,对于LQE的设计,权重矩阵的选择为和。对于LQR的设计,和。随后,L和K的计算结果分别为0.7375和0.4479。步骤3中的方程式由、L和K构造而成。步骤4中的的设计有来完成。因此,的阶次由得到。在步骤5中获得。在步骤6中,指定五个有限频率约束。因此,。这五个约束分别是
其中,对于,。约束条件中的和是将被最小化的变量。
在约束条件下,在两个特定频率范围中的每个频率范围内都会产生一个相位稳定的谐振模式,并且在谐振频率影响附近都会,整个控制系统都会产生抗干扰能力。闭环带宽通过约束条件进行调整,并且约束条件被用于减少从在相位稳定谐振模式下抗干扰是的溢出影响。
在步骤7中引入随即向量来形成鲁棒稳定性的标准。例如,当谐振极点和低频增益改变是,考虑到鲁棒稳定性,的系数将会受到扰动。考虑到低频增益变化,是固定的,并且反谐振零点扰动并不会影响稳定性。正因为如此,步骤7中的方程式用公式表示为和。步骤8中,对于中的所有元素,采用和的高斯分布生成的独立同分布的样本。因此,该算法考虑了一万个设备扰动。
在步骤9中,通过以制定的LMIs为准最小化的值得到的值。由给出,并且使用式(23)获得的空间状态矩阵。在步骤10中,发现整个控制熊德鲁棒稳定性的概率不低于。
4.2 性能分析
图5(a)显示了采用约束影响的频率响应。和之间的比较可以使用图(3)来进行。是五阶模型,具有两种主要模式的模型,以及一阶Pade近似值的延时输入近似值。是五阶,并且在4.70kHz和13.8kHz具有两个主写真模式。在的每个谐振频率的相位都接近于。因此,从图3所示的开环的频率响应中可以观察到的谐振模式通过预先设计的是相位稳定的。利用和,可以实现在设备的相位稳定的谐振模式下具有抗干扰能力的高带宽控制系统。一种用于实现的方法是执行反ZOH,随后使用如下给出的模式总和形式进行曲线拟合
其中M表示谐振模式的总数。,和分别是第m个谐振模式的残差,阻尼比和固有频率。
图3.频率响应。点虚线:初始设备。
线虚线:预先设计的滞后补偿器。
点划线:标称设备。实线:开环。
4.3 考虑均匀设备参数扰动的鲁棒稳定性分析
为了说明控制系统的鲁棒稳定性,使用了一个统计学的要求更高的方案。对于的所有元素,五十个独立同分布的样本额外使用区间上的均匀分布生成,其中于4.1节中给出。这导致了五十个受干扰的设备。对于每个受扰动的设备,其频率响应如图4所示。受扰动的设备被分为Ⅰ型和Ⅱ型号,如图4和表2所示。每五十个受扰动的设备,低频增益均会发生变化,并且主谐振模式的谐振频率和阻尼在4.70kHz是明显不同于那些的主谐振模式。由于离散时间集总参数的扰动,主谐振模式和次级谐振模式相比发生了显著变化。在其主要谐振频率处的相位在表2中用表示。虽然每个型号Ⅰ的设备的都保持在内,但由于不稳定的共振极点,每个型号Ⅱ的设备的变成。
对于五十个受扰动的设备,通过检查其闭环特征值来验证具有的整个控制系统的稳定性。如表2所示,整个控制
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[477849],资料为PDF文档或Word文档,PDF文档可免费转换为Word

