
英语原文共 9 页,剩余内容已隐藏,支付完成后下载完整资料
水辅注塑技术压力控制的仿真与实验
ZHOU Hua, CHEN Yinglong*, ZHANG Zengmeng, and YANG Huayong
浙江大学流体传动与控制国家重点实验室,杭州310027 中国
摘要:水辅注塑技术(WAIM)是一种新型的流体注塑技术,越来越受到节能,缩短冷却循环时间和产品质量的重视。对WAIM过程的现有研究表明,注入水的压力控制对于WAIM来说非常重要。然而,由于水力系统中存在非线性,WAIM系统的压力比例控制相当复杂。为了达到更好的注水压力控制,以满足WAIM的要求,WAIM系统的压比控制在数值上和实验上都需要进一步的研究。在AMEsim环境下,对一种新型的WAIM水压设计系统建模,它结合了水力系统的加载特性和非线性,对影响注塑压力和流量的主要因素进行了深入研究。与此同时,还采用了开环模型的补偿控制方法来调节注水压力,并进一步采用反馈比例积分控制器来实现更好的控制性能。为了验证AMEsim仿真结果,我们对特定的丙烯腈-丁二烯-苯乙烯(ABS)部件进行了WAIM实验,对注塑压力和流速结果在内的测量实验数据与模拟进行比较。实验与仿真结果吻合,表明AMEsim模型很准确,且负载压力的跟踪性能表明所采用的控制策略对非线性WAIM系统的压比控制很有效。压比控制方法和模拟、实验得出的结论有助于水辅压力控制技术和WAIM技术的推广和应用。
关键词:水辅注塑成型,非线性建模,压力比例控制,AMEsim模拟仿真
1 简介
水压技术近年来受到了广泛的关注,其原因其环保,抗燃和成本低,这是水压技术优于油压技术的优势【1】。研究水压比例控制技术具有重要意义,包括高体积模量,恒定粘度和低温漂移。在核工业,水下工具和运动控制研究都有许多应用,但在一般工业中却鲜有成效【2-3】。水辅注塑成型(WAIM)类似于气体辅助注塑成型(GAIM),是制造中空或部分中空塑件最新方法。在WAIM过程中,水可以通过水压系统供应并注入到部件的熔化区域中以产生空腔,也可以移动到熔化部分的核心。由于水和气体的不同【4-5】,WAIM技术有很多优势,例如缩减冷却时间,提高产品质量和降低成本。WAIM节省时间,能源,纯氮和聚合物材料,并且可以产生比气体更大的空隙空间和更长的中空部分。此外,WAIM还可生产厚薄部分,并且具有收缩率小,翘曲小,表面光洁度好的特点。因此,WAIM将液体辅助注塑成型的应用带到了更广泛的细长件领域【6】。
WAIM工艺主要包括如图1所示的五个步骤,即聚合物熔体的注射,注水,保压,排水和零件喷射。在聚合物熔体注射完成之前,水压系统通常需要延时运作。 整个过程持续时间一般不超过3秒,这取决于聚合物的特性,压力,熔体的温度,模具他行和注入的水【7-11】。 在注水过程中,水泡向前推聚合物熔体并形成空芯,在这过程中,压力和温度应由水压系统调节。为避免喷水器区域出现湍流,建议从低压就开始调整负荷压力曲线,然后在再升到高压。所以压力应该控制在一个或多个斜坡上。WAIM的过程是间歇性的,注射阶段的时间很短,通常只有一两秒,这是工作周期中的一个阶段。当注水过程结束时,压力保持不变,并且流速降低到非常小的水平时熔体能再冷却时间期间收缩。但过低的压力可能会导致缩孔等缺陷。在接下来的步骤i-e,排水,开模和成型中,水压系统不需要提供压力和水。总之,间歇性,注射压力和流量的多变性以及加工时间的控制是WAIM的主要工作特性。
图1 WAIM的压力负载曲线
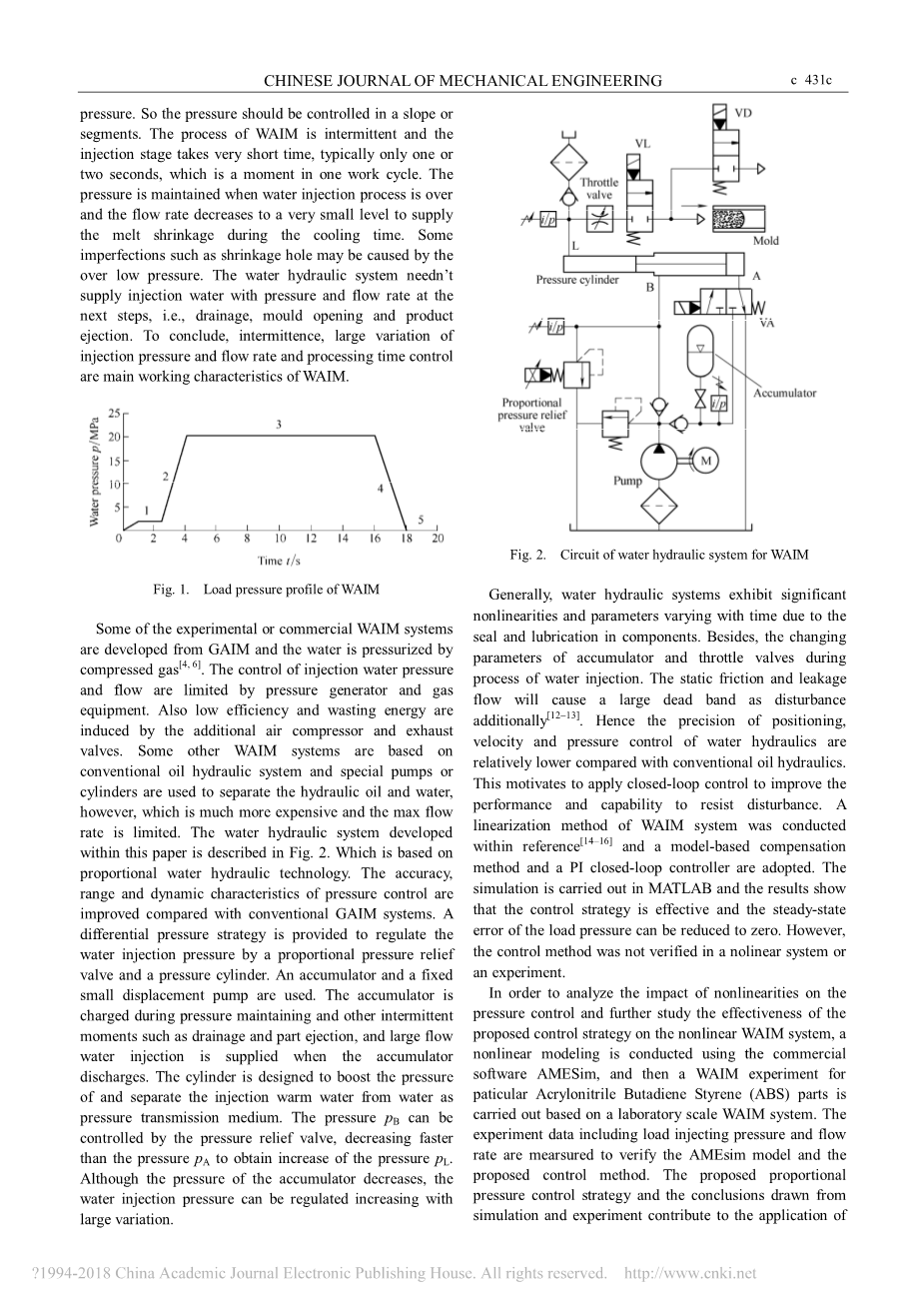
一些实验或商业WAIM系统是由GAIM开发的,水由压缩气体加压【4,6】。注水压力和流量的控制受到压力发生器和气体设备的限制。另外的空气压缩机和排气阀也会导致低效率和浪费能量。一些其他WAIM系统基于传统的液压系统,并且使用特殊的泵或缸来分离液压油和水,然而,这更昂贵并且最大流量是有限的。本文开发的水压系统如图2所示。这是基于比例水压技术。与传统的GAIM系统相比,压力控制的精度,范围和动态特性得到了改善。提供差压策略以通过比例溢流阀和压力缸来调节注水压力。使用蓄能器和固定小排量泵。蓄压器在压力保持期间以及其他间歇性力矩(例如排水和零件喷射)中被充电,并且当蓄压器放电时供应大流量水注射。气缸设计用于增加压力传输介质的压力并将注入的温水从水中分离出来。压力pB可以由压力释放阀控制,降低得比压力pA快,以获得压力pL的增加。尽管蓄能器的压力下降了,但是可以调节注水压力并且随着大的变化而增加。
图2 WAIM水压系统回路
通常,由于部件中的密封和润滑,水压系统显示出显着的非线性和参数随时间变化。此外,注水过程中蓄能器和节流阀的参数变化。另外静摩擦和泄漏流动会引起较大的死区作为干扰【12-13】。因此,与传统的油压液压系统相比,水压系统的定位精度,速度和压力控制相对较低。这激励应用闭环控制来提高抵抗扰动的性能和能力。WAIM系统的线性化方法在参考文献【14-16】中进行,并采用基于模型的补偿方法和PI闭环控制器。在MATLAB中进行仿真,结果表明控制策略是有效的,负载压力的稳态误差可以降到零。但是,该控制方法未在非线性系统或实验中验证。
为了分析非线性对压力控制的影响并进一步研究所提出的控制策略对非线性WAIM系统的有效性,使用商业软件AMESim进行非线性建模,然后进行关于特定丙烯腈丁二烯苯乙烯(ABS)部件是基于实验室规模的WAIM系统进行的。 对包括注入压力和流量的实验数据进行了测量,以验证AMEsim模型和所提出的控制方法。最终得出,比例压力控制方法和模拟、实验得出的结论有助于水压控制技术和WAIM技术的应用。
2 建模和控制理论
2.1 WAIM的非线性建模
为了简化非线性建模,本文只考虑注水过程,因为它是工作循环中最重要的步骤。注水压力取决于聚合物熔体的流动阻力和部件几何形状。当注入模腔时,液体冷却聚合物熔体并增加其粘度。WAIM型腔填充过程包含粘度差异大的水和聚合物熔体的动态相互作用,并且高分子材料的粘温特性决定了温度。注水过程相当复杂且难以描述,我们之后尝试使用CFD方法进行研究【17】,并得出了一些重要结论。但是,为了实现系统的压力控制,需要简化负载特性。于是通过仿真,可以得到负载压力和流量之间的耦合关系。考虑负载惯性,弹性和粘性,负载压力p可以估算为【17】
其中AL是模具内腔的平均交叉面积。mL,kL分别为负载的等效质量和弹性系数。BL为等效粘滞阻尼系数,BL =kmu;AL2,可由CFD软件或WAIM实验获得。通常本文中kL比BL小得多,一般设置为0。
为了满足工作循环中的间歇性要求,系统中使用了经过特殊处理的抗腐蚀和防锈的空气累加器。本文只研究放电过程,蓄电池的放电过程假定为快速绝热,即多变指数na = 1.4。与气体相比,流体是不可压缩的。累加器中不会出现湍流【18】。 根据这些假设,空气累加器的流量可写为:
使用Boyle法则,我们得到:
其中pa0和Va0是预充气体的初始值,pa和Va是累加器中的压力和气体体积。 累加器中水的力平衡方程可写为:
式中pa,qA为蓄水器内水的压力和流量,Aa,ma,Ba分别为蓄水器内水的等效面积,等效质量和粘滞阻尼系数,除此之外,Ba =8pi;mu;w(V0-Va)/ Aa和ma =rho;(V0-Va),其中mu;w是水的动态粘度,V0是蓄能器的体积。
考虑进水口限制,蓄水池水流的连续方程可写为:
其中Cd,AfA分别为流量系数和累加器进口的截面面积,为蓄能器中水的密度。
压力缸是WAIM系统压力控制的关键部件。考虑到静摩擦的影响,压力缸的力平衡方程可由下式给出:
考虑到泄漏和摩擦的影响,水流的连续方程如下:
其中,pA,pB,pL,qA,qL分别是圆柱体的端口A,B和L处的压力和流量,并且x是活塞的位移。除此之外,mp,Bp,f,Cip,Cep分别为活塞等效质量,粘滞阻尼系数,静摩擦力,内外泄漏系数,beta;e为该系统传动介质的体积模量。 靠近端口A,B和L的活塞区域被命名为A1,A2和A3。由于水的润滑性差,缸体与活塞之间的摩擦也比较较大,特别是静摩擦。同时,由于水的低粘度不容忽视,压力缸内部也存在很大的泄漏量。
作为水力系统与负载的接口部分,注水器在WAIM系统中起着至关重要的作用。注水机结构复杂,本文采用环形结构[18],因为它能够有效抑制聚合物的流动并为模具提供较大的流量,注水机模型为:
其中Cd,AfL分别为流量系数和注水器流量面积。
水压比例控制溢流阀可视为WAIM系统中最重要的组成部分,这是一个典型的非线性阶段【19】。频率响应带宽也远低于WAIM系统的固有频率。通过补偿【20】,比例溢流阀的传递函数可以简化为具有非线性死区的第三阶相位:
其中kr,omega;r1,omega;r2,xi;r分别为比例增益,一阶惯性环的转角频率,二阶振荡回路的固有频率和比例溢流阀的阻尼比,u和U分别为输入和输出死区,umax是最大死区值。
2.2 基于模型的补偿
然而,由于蓄能器和差压缸的固有特性,WAIM的水力系统是不可控制的。考虑方程(6)我们可以看到,随着控制输入pB的增加,负载压力pL反而下降。 通过这种假设,我们提出了一种基于模型的补偿方法来消除导数项的影响。观察公式(6)并忽略动态项对简化控制器的影响,基于模型的补偿定律可定义为【14】:
其中prsquo;L是预先规定喷射压力的参考输入值,通常是斜率信号prsquo;B是比例溢流阀的参考压力信号。pA和prsquo;L用于重建参考压力信号prsquo;B,随着pA的减小和prsquo;L的增加,pB将跟随prsquo;B而改变,最后控制负载压力pL可以改变参考输入p#39;L。
2.3 闭环控制方法
通过上述基于模型的补偿,系统转变为可控系统,,提出的开环方法不仅简单可靠,也改进了水压控制系统的结构。然而,对于开环系统,由于节流阀管道的阻力和被忽略的摩擦,较大的误差是不可避免。为了实现阶跃响应的零跟踪误差,需要一个理想的“0”型系统积分器。本文的仿真和实验采用了广泛使用的PI控制器,因为它对于非线性和线性系统都是可靠和稳健的。当选择合适的增益时,可实现快速瞬态响应和高稳定性,PI控制法则可写为:
其中KP,KI分别是比例和积分器增益的参数,e是pL和p#39;L的跟踪误差。
3 AMEsim 仿真
3.1 AMEsim 建模
AMESim软件,是一个非常强大的工程系统仿真工具,可应用于流体动力、机械、控制和电磁系统等。对于液压系统,物理组件和整个电路可以用图形表示。
WAIM的水力系统的建模可以基于非线性的部件来建立。图3为AMEsim模型的示意图,物理系统的主要部件如图4所示。AMEsim模型主要包括压力缸,蓄能器,注水器和水比例溢流阀。构件“a”是基于HCD库构建的压力缸,考虑缸体的摩擦力和位移极限。虽然水压比例溢流阀的性能较差,但它仍然可以视为二阶段,一阶阶段和可表征为组分“c”的死区。AMESim模型采用水力喷射器为了简化而具有液压限制器“d”,并且具有进气特性的蓄能器组件“b”被采用。AMEsim中的人造负载单元的特征在于组件“e”。由于模具中的注水过程太复杂,不能用一系列简单的方程来定义,所以通过CFD模拟进行研究。这里负载单位随着系统流量的增加而线性变化。为了更精确的模拟,未来应该研究更多的负载分析。下图表格列出了仿真中定义的主要参数。
图3 AMESim的WAIM建模
图4 WAIM主要部件
3.2 仿真结果
图5给出了仅采用基于模型的开环控制补偿时的负载压力pL的仿真结果。 如图所示,负载压力可以大致遵循参考输入,这意味着导数项可被取消,并且系统是可控的。
图5 基于模型补偿的负载压力
图6仅显示了基于模型补偿的压力缸的端口A,B和L的压力模拟结果。 根据图6中的曲线可以看出,随着蓄能器压力pA和压力pB的减小,负荷压力pL随着大的变化而增加,并且这种关系非常接近方程式(6),图5和图6中的两个仿真结果都验证了模型补偿的有效性,尽管响应相当缓慢而稳态误差不为零。
图6 基于圆柱体模型补偿的A、B、L端口压力
为了提高压力控制性能,采用闭环反馈控制方法。图7给出了不同积分增益KI的负载压力pL的结果。仿真结果表明,闭环控制方法提高了系统的控制精度和响应性。然而,由于积分器在延迟时间内的累积误差效应,负载压力的死区大于开环方法,将来应该减小。注水压力的过冲和振荡现象会极大地影响WAIM产品的质量,甚至会造成严重的不规则空隙形状。如图7所示,负载压力振荡随着增益KI的增加而显着增加,并且延迟更严重。相反,当增益KI减小时,系统的响应非常缓慢并且在指定的时间内跟踪误差很大。因此,应适当选择KI来改善或确保压力控制的稳定性。
图7 不同增益器下的加载压力
图8显示了采用不同类型的注水器时的负载压力的模拟结果。 在注水过程中,注水通过注水器并向前推动聚合物熔体。 因此,负载特性主要受喷水器流阻的影响。 随着注水器等效流量面积的增加,注水器后的水压力得到较好的瞬态响应。 实际上,模具中水的压力是影响模制件质量的最重要的因素,其不能直接控制,并且如果注射器的等效流动面积太小,模具内水压的瞬态响应 会非常缓慢并且会对模制部件产生负面影响。
图8 不同水注类型的加载压力
图9显示了使用各种类型的注水器时的水泡流量。 即使压力pL几乎相同,这意味着大流量区注水器更适合于WAIM生产,特别是对于大容量模具,流量在特定时间内变化很大。
图9 不同类型注水器的加载流量
考虑到注入压力稳定性控制负载特性的WAIM应该被调查。 图10给出了具有不同等效粘滞阻尼系数的荷载压力的仿真结果。 随着负荷粘滞阻尼系数的降低,负荷压力振荡现象更为严重,WAIM系统压力控制系统的稳定性变差。 这主要是因为随着熔体粘度
全文共10071字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15252],资料为PDF文档或Word文档,PDF文档可免费转换为Word

