
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
地面车辆预测主动转向与自主避障的模型
Yongsoon Yoon,Jongho Shin,H. Jin Kim,Yongwoon Park, Shankar Sastry
摘要:本文提出了无人地面车辆的轨迹生成模型预测方法(UGVs)结合轮胎模型。根据约束条件下的成本最小化原则,提出了一种避免障碍物碰撞的最优跟踪问题。障碍物的信息被纳入在线的非线性模型预测框架,因为它们在有限的传感范围内被感知。整个问题用非线性规划在线求解。在检测到新的障碍物时,对于本地路径再生,使用了增强的代价函数。两种方法的障碍信息的fiRST方法使用从UGV距离最近检测到的障碍物,而第二种方法是使用视差信息从障碍物的车辆。仿真结果表明,在杂乱的环境和动态环境下的莫迪fiED视差的方法有效fl方面障碍的UGV考虑车辆的尺寸和状态变量的威胁,显示过去方法的距离明显改善。
1.介绍
各种军用和民用的应用经常需要UGVs(无人地面车辆)在未知自主移动。 在动态和物理约束下的环境,而不是简单地按照预先计划的路径由一个fl线指定任务规划算法。本文研究的无人地面车辆和在复杂的环境中避障的主动转向的问题,利用模型预测方法。为了解决动态轨迹生成问题,图1所示的UGV,自行车模型结合使用的一种预测系统未来的演化的非线性轮胎力模型。在局部避障的许多研究已经形成,其中大部分使用反应性的基于传感器数据的方法,如Rimon和(1992),Spenko,Koditschek艾格尼玛,与Dubowsky(2004),Fox,Burgard,和史朗(1997),西蒙(1996)和Minguez和蒙塔诺(2000)。一些考虑简单的机器人动力学方面的速度或把半径(Ulrich amp; Borenstein,1998)。这些方法是计算EFfi有效,但车辆可以陷入局部极小点,有时是需要世界的离散化,或将复杂的动力学是不容易的。在Ulrich Borenstein(2000),A*搜索使用一个fi轨迹树固定的深度,而在阿拉斯,也许托马蒂斯,和西格沃特(2002),该尺寸 车辆被视为减少动态窗口。稍后将显示,考虑中心位置。 重心(CG)的车辆可能不足够fiCE避障在一个狭小的地区。最近,自主车辆系统预测的主动转向控制进行了研究(博雷利,法尔科内,Keviczky,Asgari,amp;赫罗瓦特,2005;法尔科内,博雷利,Asgari,Tseng,和取得2006;法尔科内,博雷利,Asgari,Tseng,amp;赫罗瓦特,2007),一个轮胎模型(Bakker,尼堡,1987),在那里与Pacejka,自主车是直接按照给定的参考应该是车辆无碰撞而实现的。然而,在未知的环境下,它是困难的fi邪教获得这样一个安全预fi内德参考。此外,由于车辆的尺寸是不明确的考虑,如果环境是复杂和混乱的,它可以是一个严重的问题,以前的方法可能是在视图的实现点有限,由于计算优化所需的时间。
本文还考虑了在线避障问题。
使用模型预测方法导航到目的地。在这个框架中,控制器预测未来的路径,并解决了一个优化问题来规划无碰撞轨迹。模型预测控制(MPC)已被应用于控制的各种系统,包括各种工业系统(2003秦与badgwell,)。它也被用来产生无人机安全的轨迹(基姆,Shim,和沙斯特里,2002;基姆amp;垫片,2003)在未知环境中使用简化fiED动力学。但相比于设置认为,无人地面车辆经常被用在更杂乱的环境中。视差法提出了一种独特的方式将EFfi充分考虑速度的要求,尺寸和实际在非线性模型预测框架移动方向。随着利用机电一体化汽车零件(Isermann,2008),可以作为一个基础配方,可以改善常见的方法是基于距离的物体在关注限制冲突避免机制的一部分,有助于视差。2节介绍了一种非线性的UGV结合轮胎模型。第3节给出了基本MPC公式和算法。在第4节中,针对有限感知范围的本地路径生成,提出基于距离和视差的方法。第5节给出了仿真结果,以验证所提出的算法,第6节包含结束语。
2.UGV模型
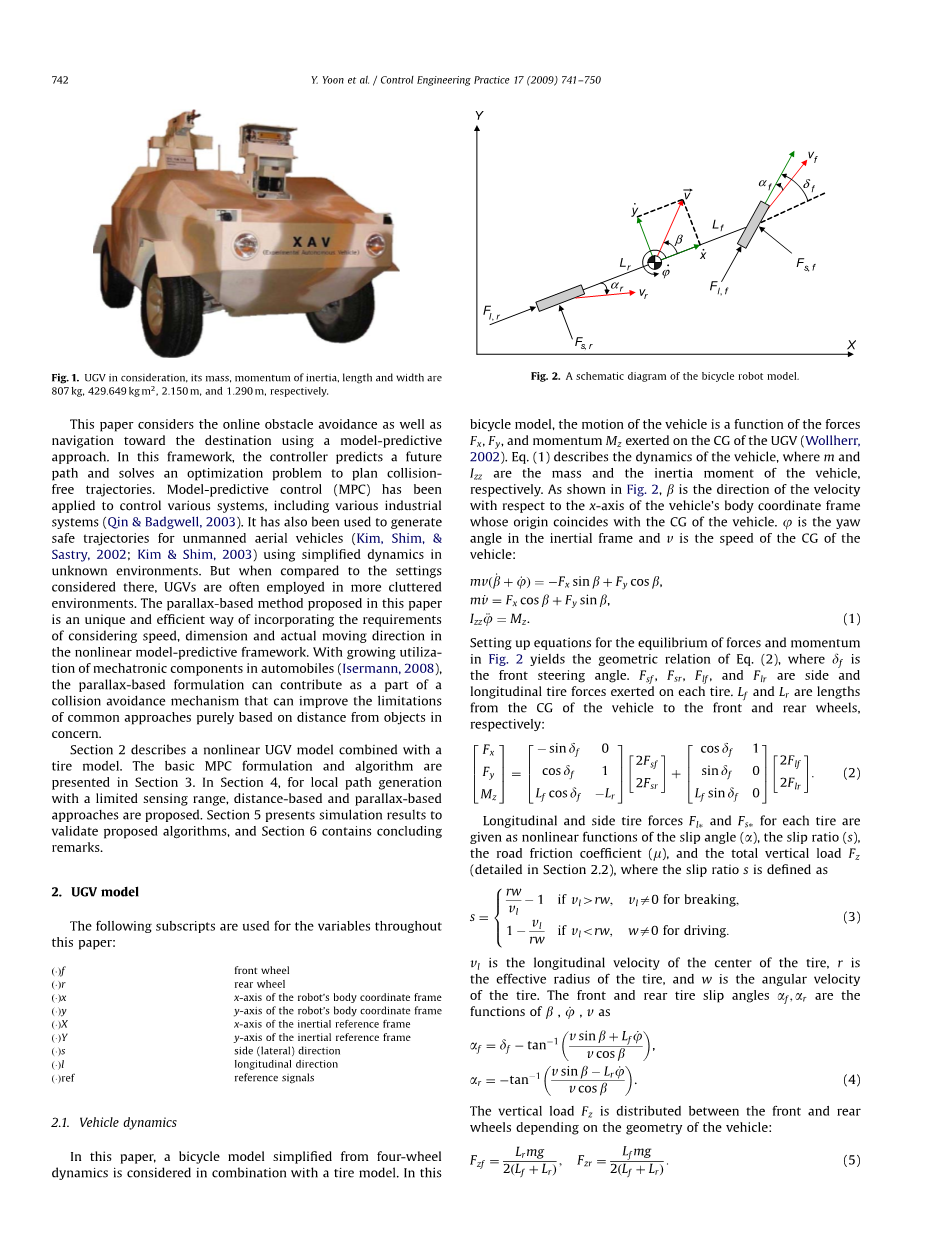
在本文中,一个自行车模型简化fi从四轮动力学是一个轮胎模型结合起来考虑。自行车模型,车辆的运动是一个军队的FX,FY和动力功能,MZ对UGV的CG(wollherr,2002),Eq.(1)描述了车辆的动态,其中m和我ZZ是该车辆的质量和惯性矩,分别。如图2所示,b是相对于车体的坐标系的x轴的速度方向,其原点与车辆的CG相一致。j是惯性系中的偏航角,v是车辆重心的速度。
在图2中建立力和动量平衡方程,得到公式(2)的几何关系,其中DF是前转向角。FSF,FSR,FLF,和FLR侧和每个轮胎的轮胎纵向力作用。LF和Lr分别是从车辆的CG到前后轮的长度。
2.1轮胎模型
在公式(2),轮胎力的Pacejka的魔术公式描述的轮胎模型(Bakker et al.,1987)是本文中使用的。该模型代表了一个复杂的半经验关系,它考虑了纵向轮胎力和侧向轮胎力在组合制动和转向条件下的相互作用。无花果。3(a)和(b)分别显示纵向轮胎力。
滑移率与对应的前轮偏角AF FZ不同值的轮胎侧向力。可以看出,轮胎的力关系可以用滑移率和轮胎滑移角的双曲线正切函数来近似。
2.2选择模型
为了重新fl等使用计算EFfi系数模型的UGV的动态特征,以下简单fi阳离子了非线性的自行车模型。
利用上述假设和状态和控制输入
向量xfrac14;frac12;B;J;_j;DF;XCG;ycgt和Ufrac14;_df,和输出vectorz,Eqs。(1)、(2)、(4)和(6)可以改写如下:
部分非线性AFfiNE模型:
2.3模型的比较
for the simplified模型(validation(7))was against the自行车相比,完全非线性模型(情商。(1)-(6)轮胎非线性侧combined with the)模型(图3)。in the front steering图4,5 = S is for rate of and for the next 2.5 2.5 S,S,S =Agrave;5 is applied for Pure and partial非线性模型与自行车相同的初始条件。不管of the partial动态特性的线性化,保持相似。
三.模型预测控制算法
3.1.基本模型预测算法
或离散时间域实现(基姆等人,2002),
方程和动力学方程(7)是:xtthorn;1frac14; fdteth;xt; utTHORN;,Ztthorn;1frac14; heth;ZtTHORN;.
鉴于目前的状态X0;Tfrac14;XT,MPC是计算最优控制序列frac12;UAtilde;K;TNAgrave;1kfrac14;滚动原理,在每一个时间步t,它解决了以下: 这里t是当前时间,N是长度的前瞻视野和K是时间步内的前瞻视野在每个T等式(10)是离散和动力学。Eqs的不等式约束。(11)和(12)重新fl等极限U和D F
- 和(14)是对较小的轮胎滑移角的偏向。
考虑跟踪以下成本函数给定的参考轨迹(Mayne罗林斯,Rao,和Scokaert,2000):
这是definedtilde;zktilde;zk;轴;tfrac14;zref;钾;tAgrave;ZK;T,在他是参考文献;参考轨迹。P,Q,R是常数矩阵和权重。penalizes情商。(16)的偏差在final实习。“first表达式或方程。(17)是点球的偏差从期望的令牌的参考,和第二项penalizes大控制信号的最小能量消耗的视图。“平等和不等式约束是有限到增强成本函数如下:
以增强成本函数(情商。(18)-(22),在线优化采用梯度搜索(基姆et al.,2002;萨顿bitmead,2000)。
3.2.离子轨迹生成
在设置本文认为,无人地面车辆有仅包含开始和目标位置而非障碍物位置有限的信息。他们要求导航从开始他们的目标没有任何碰撞使用传感器数据测量传感器安装在无人驾驶。假定无人地面车辆可以估计自己的状态变量,控制输入命令和输出变量precisely.fig。5显示了由全局路径规划和局部运动轨迹的生成过程。最初,UGV从一个已知的目标和起始位置,并生成fl全球轨迹线。对目标点的方式,如果传感器探测到障碍物,UGV再生局部轨迹避开障碍物在线。用于本地路径计算的附加成本函数术语将在第4节中得到处理。
为简单起见,最短的直线连接的起始位置[ XCG;0;0,0;0 ]和YCG;目的地[ XCG;F、YCG;F ]作为参考轨迹zref;K;Tfrac14;frac12;XCG;K;T;裁判;我们;K;T;参考。specifyingzref;K;t为时间的固定功能并不可取,因为积累由于新检测到的障碍可以从这些价值观偏差。在每一个时间t,从当前位置Z0;T,ZK;Tfrac14;frac12;XCG;K;T;YCG;K;TT Kfrac14;1;hellip;;1是预测使用从先前获得的控制输入序列
优化步骤。然后Zref;K;T得到具有相同的X或Y坐标为ZK直线的点;T,这是接近目标的位置,如图6所示。
为了促进和推动向目的地而不是退回由于危害,下列术语添加到公式(18): pfgoal;K;Tfrac14;12kgoald2goal;K;T(23)在Kgoal的加权参数,和市和迪;K;Tfrac14;kzcg;K;T zgoalk ZCG之间的距离;K;T和zgoalfrac14;frac12;XCG;F;YCG;f t这一方法的差异和传统场的方法在于在滚动的框架优化。这一事实将导致整体性能的巨大差异,如第5节所示。
4.本地轨迹再生
本节介绍两种调节模式(18)的方法,以利用传感器信息实现避障—有限范围。在fiRST方法,车辆与障碍物之间的最小距离,随着汽车行驶速度的加权。在第二种方法中,利用视差信息巧妙地考虑了车辆的尺寸。
4.1.基于加权距离的方法
在这种基于距离的方法中,利用车辆检测到的障碍物的距离信息构造潜在的类似成本函数,并将其添加到公式(18)中以从障碍物产生排斥场。
让通讯;K;T;我表示距离的UGV表面和与检测时间eth;K TTHORN;之间的障碍。作为传统方法的一个扩展,对无人驾驶速度的考虑也为以下形式:
Kobs是一个加权参数,是一种非奇异性小的正的常数。注意,车辆的尺寸是间接考虑的,但不考虑车辆的实际移动方向。
4.2.莫迪fiED视差法
人类从视差中感知物体的距离,即从两个不同的观察点到物体的直线之间的夹角。这个原理应用在这里,修改反映的UGV的实际运动方向。
假设在时间eth;K;TTHORN;i和j,障碍物检测在感应范围及其坐标frac12;PX;K;T;我;热解;K;T;我和frac12;QX;K;T;J;QY;K;T;J.然后,(PX;K;T;我,PY;K;T;我),我在车辆坐标系确定障碍物的坐标如下: 现在如图7所示,假设其;K;T;我和YFR;K;T;我(加州;K;T;J和应用;K;T;J)表示之间的前角(后)面和连接障碍我行(J)与车辆的每一个顶点。让BFL;K;T,BFR;K;T,K;T,和BRL;BRR;K;T表示四个顶点的UGV的移动方向。它们可以计算如下:
改进的视差(MP)角Ytilde;F;K;T;我和Ytilde;R;K;T;J,对检测到的障碍物位于PK定义;T;我和QK;T;J相对于车辆的前部和后部。
UGV的障碍:如果在感应范围检测
在KMP;F和KMP;R值的加权。Eq.(29)反映了在制定威胁程度时以更高的速度转向的困难。Eq.(28)惩罚更高的MP值。
即使两个障碍都位于相同的视差,使用公式的修改(28)能够反映出不同级别的威胁方面的四个顶点的UGV的实际运动方向。无花果。11(a)和(b)分别显示基于MP和基于距离的惩罚函数的危险分布。在基于距离的方法中,在车辆周围选择有限数量的点,并考虑这些点和障碍物之间的最小距离。另一方面,基于MP的方法使用两个最大的MP信息定义在车辆的正面和背面。当车辆在图11右转时,两个不同障碍物在同一车辆距离上的实际危险程度可以根据相对方向而有所不同。图11(b)中基于纯距离的方法不能反映这一点,但是图11(a)中的MP可以。
此外,MP包含关于车辆尺寸的信息。例如,当障碍物位于车辆前方时,它会触发较大的视差值,而不是较窄的车辆。同时,想象两障碍具有相同的视差值eth;加州thorn;THORN;应用,其中之一是接近长车,短车其他。式中较大的L值(26)的修正项JBRL brrj绝对值较大,尤其是当j_大。在式(27)中,这导致对与较长车辆相关的原始视差值的较大修改。而当其梯度项用于MPC算法,方程(28)含有丰富的状态信息(B,J,j_和重心位置)(图8)。
5.仿真结果
为了测试所提出的方法的性能,使用表1中的设置进行数值模拟。第5.1节介绍了在当简单的环境中导航。在第5.2节中,一个更混乱的环境被认为是一个轨迹空间。
连接起始位置和目标位置
全文共8339字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[11769],资料为PDF文档或Word文档,PDF文档可免费转换为Word

