
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
使用模型预测控制(MPC)和空间矢量调制(SVM)实现三相PWM整流器的基于虚拟磁通量的直接功率控制(DPC)
Hamid Eskandari-Torbati 硕士研究生 伊朗科技大学电气工程系 伊朗德黑兰 电子邮件:hamideskandary.t@gmail.com
Davood Arab Khaburi 副教授 伊朗科技大学电气工程系 伊朗德黑兰 电子邮件:khaburi@iust.ac.ir
Vahid Eskandari-Torbati 光纤项目经理 Moniran顾问工程公司,伊朗马什哈德 电子邮件:vahid.eskandari@gmail.com
摘要:本文介绍了一种控制三相PWM整流器的新方法。这种方法被归类为直接功率控制(DPC)组,其中包括使用模型预测控制(MPC)和空间矢量调制(SVM)的PWM整流器的不同控制方法。此外,该方法使用输入电源电压的虚拟磁通量(VF)矢量来改善整流器在谐波条件下的性能,而且该方法非常简单并且没有复杂性,选择方法没有限制,在每个开关周期内以转换器的最佳状态切换,此方法通过对典型三相PWM整流器在不同条件包括供电网络的正常和谐波条件以及再生模式下的仿真进行测试。
关键词:PWM整流器;直接功率控制(DPC);虚拟磁通量;模型预测控制(MPC);空间矢量调制(SVM)
一、引言
许多不同的家用和工业用电器件会消耗一种直流电能,而配电网络主要是一种交流电能,因此整流电能是一个非常重要和普遍的问题,所以整流器是电力电子变流器中常用的变流器。
在不同类型的整流器中,二极管整流器在电气设备中应用最多;因为它们具有价格低廉,配置简单以及不需要任何控制单元等优点。在二极管整流器之后,晶闸管整流器在电气领域的应用最为广泛。这些整流器价格低廉,配置简单,如二极管整流器,但它们需要一个简单的控制单元而不是二极管整流器。二极管和晶闸管整流器被称为低频整流器,因为它们的开关频率接近线路频率。但是这些类型的整流器有一些显着的缺点:整流器的输入电流高度失真,整流器总是一个无功功率收发器,并且直流母线电压的纹波很高[1]。
这些缺陷伴随着电力电子设备以及控制方法的改进和进步,促使科学家改进整流器的性能,并且发明了称为PWM整流器的高频整流器。 在PWM整流器中,与线路频率相比,功率开关在高频下被强制打开和关闭; 因此PWM整流器可以被称为高频整流器。这些类型的整流器具有低纹波直流母线电压,低失真输入交流电流以及可在任何方向控制输入有功和无功功率的优点。作为回报,与低频整流器相比,PWM整流器有一些缺点,它们在某种程度上受到限制,它们是:更昂贵,更复杂和更多的开关损耗[1]。
从PWM整流器到发明到现在以来,文献中提出了许多不同的控制方法并且正在进行研究。根据他们对电流控制回路或功率控制回路的使用,这些方法可以分为两个分支[2]。使用电流控制回路的第一个分支的方法称为定向控制(OC)方法,并且可以根据控制算法的基本向量依次分为两组:算法使用电源电压的空间矢量,称为电压定向控制(VOC),以及将虚拟磁通量的空间矢量引用为虚拟磁通定向控制(YFOC)的算法[3-5]。此外,使用有功功率控制回路和无功功率控制回路的第二支路的方法被称为直接功率控制(DPC)方法,并且类似于第一支路可以分成两组:基于电压的直接功率控制(V-DPC)和基于虚拟磁通的直接功率控制(VF-DPC)[6-8]。使用虚磁通矢量代替电压矢量除了在电源电压的谐波条件下改善整流器的性能之外没有任何益处[9]。
传统的定向控制或DPC方法在其电流或功率控制回路中使用滞环控制器。使用这种控制器使得控制单元有必要使用高采样频率,并且当控制器的滞后带越窄时,采样频率应该越高[2]。除此之外,开关频率在此应用中不会保持不变。这些是常规OC或DPC方法的最重要的缺点。
为了克服上述缺点,在一些文献[10,11]中提出用PI控制器代替磁滞控制器并使用恒定频率的开关策略。这可以减缓采样频率,但调整PI控制器的问题出现了。
在这些努力中,一些研究人员专注于在不平衡条件下控制PWM整流器,另一些研究人员则从事多电平PWM整流器[12-14]。
Antoniewicz [15]提出了使用PWM整流器控制的预测算法,该算法使用了具有不同目标函数的模型预测控制(MPC),之后Bouafia et.al. DPC使用死区控制来控制三相PWM整流器[2]。最近发表了一篇来自作者的论文,其中基于电压的MPC与DPC一起,没有任何限制地选择转换器开关的状态,用于控制三相PWM整流器[16]。使用恒定开关频率的预测算法具有算法使用滞后和PI控制器的共同优点。
本文提出了一种新的基于虚通量的模型预测控制和直接功率控制算法。该方法具有恒定的开关频率并使用空间矢量调制(SVM)。首先在下一节中介绍理论原理,然后在负载和供电网络的不同条件下展示和讨论该方法的操作。与先前的工作相比,该方法的主要优点是该方法在谐波条件下的性能优于其他方法;显然这是因为使用虚拟磁通矢量代替了网络的电压矢量。格式化程序需要创建这些组件,并包含以下适用的标准。
二、方法的理论原理
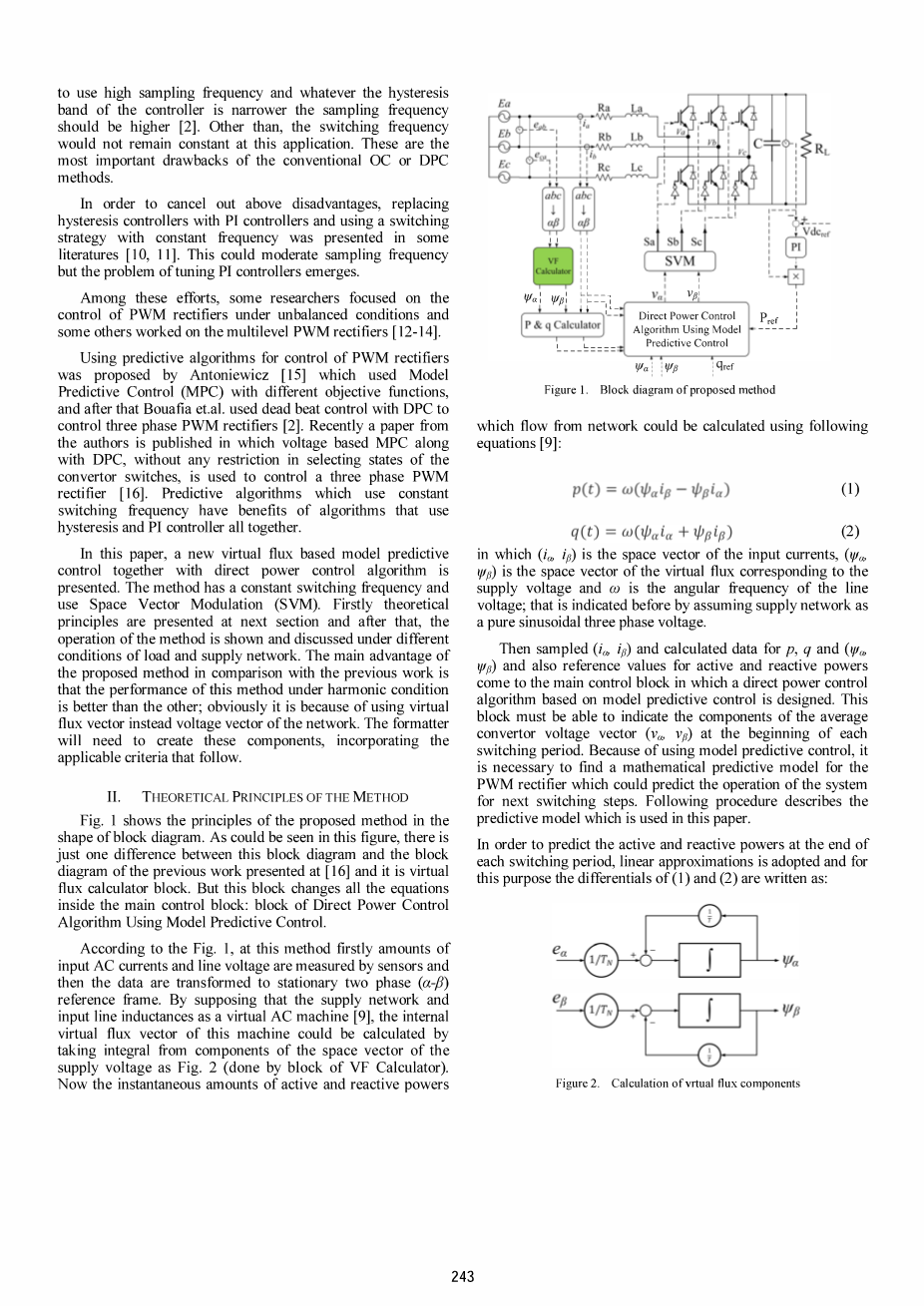
图1以方框图的形式显示了所提出的方法的原理。从图中可以看出,这个框图和前面[16]的工作框图之间只有一个区别,它是虚拟通量计算器模块。但是该块改变了主控制块内的所有方程:使用模型预测控制的直接功率控制算法块。
图1. 所提方法的框图
根据图1,在此方法中,首先通过传感器测量输入交流电流和线电压的量,然后将数据转换为静止的两相(alpha;-beta;)参考系。通过假定供电网络和输入线路电感为虚拟交流电机[9],本机的内部虚磁通矢量可以通过对电源电压的空间矢量的分量进行积分来计算,如图2所示(由VF计算器块)。现在,从网络流出的瞬时有功功率和无功功率可以用下列公式计算[9]:
(1)
(2)
其中(ialpha;,ibeta;)是输入电流的空间矢量,(psi;alpha;,psi;beta;)是对应于电源电压的虚通量的空间矢量,omega;是线电压的角频率;通过假设供电网络是一个纯正弦三相电压,就可以看出这一点。
然后采样(ialpha;,ibeta;)和p,q和(psi;alpha;,psi;beta;)的计算数据以及有功功率和无功功率的参考值来到主控制块即基于模型预测控制的设计。该模块必须能够在每个开关周期开始时指示平均转换器电压矢量(nu;alpha;,nu;beta;)的分量。由于使用模型预测控制,有必要为PWM整流器建立一个数学预测模型,以预测系统在下一个开关步骤中的操作。以下程序描述了本文使用的预测模型。
为了预测每个开关周期结束时的有功功率和无功功率,采用线性近似,为此,(1)和(2)的差分写为:
图2. 虚拟通量分量的计算
(3)
(4)
为了消除上述等式中对(ialpha;,ibeta;)的导数项这对下一个等式非常重要,可以使用(alpha;,beta;)帧中PWM整流器的微分方程:
(5)
(6)
其中的字母分别表示输入线路电感的电阻和电感。但是,由于所提出的方法基于虚拟磁通矢量,所以在算法的方程式(5)和(6)中不希望出现线电压的空间矢量(ealpha;,ebeta;)。为了消除这个缺陷,并且为了消除(psi;alpha;,psi;beta;)的导数项,可以在主要方程中使用和代替等式[17]。
(7)
(8)
(9)
(10)
将式(5),(6),(7),(8),(9)和(10)代入式(3)和(4)中,瞬时有功功和无功功率的导数可写为:
(11)
(12)
根据上面的等式,在每次从交流线路电压和电流采样之后,除了(nu;alpha;,nu;beta;)之外,这些等式的所有参数都被指示,以便系统以成本函数的最佳方式运行。为了简化追随者步骤,可以假定以下关系:
(13)
其中k是系统的采样计数器。 通过考虑式(13)并且使用一阶(线性)近似而不是微分项,下一个开关周期(t = k J)开始时的有功和无功功率的量可以如下计算:
(14)
其中Ts是转换器的开关周期。
与任何其他模型预测控制算法类似,应该为这个提出的方法定义成本函数。在本文中使用的成本函数是一种常用的类型,为了获得最佳的响应,它应该被最小化,如下所示:
(15)
在上面的等式中,pref和qref分别是有功功率和无功功率的参考值,并且成本函数规定最佳条件是当每个变量(p,q)的实际预测值和参考值之间的差为零。
有功功率的参考值来自一个PI控制器,输入是实际的直流母线电压值,并乘以直流母线电压,如图1所示;而无功功率的参考值直接从控制单元的外部(主要由用户)指示,并且对于单位功率因数操作通常被设置为零。
为了使成本函数J最小化,为了表示转换器的平均电压矢量(nu;alpha;,nu;beta;),应该分别从J取相对于nu;alpha;和nu;beta;的偏导数。如果合成方程式等于零,则产生一组两个方程式和两个未知(nu;alpha;,nu;beta;),其可以同时求解:
(16)
根据式(16),转换器平均电压矢量的分量可以在每个开关周期开始时计算。之后可以使用任何种类的SVM算法来指示每个开关周期期间开关的状态。
三、仿真结果
所提出的方法的性能在使用MATLAB / SlMULINK工具的典型PWM整流器和不同条件下的仿真研究中进行了研究。表1我展示了系统的主要控制和电源电路特性。
表1. 典型PWM整流器的控制和功率特性
|
名称 |
数值 |
|
开关频率(fs) |
10kHz |
|
电抗器的电阻(R) |
100mOmega; |
|
电抗器的电感(L) |
10mH |
|
直流母线电容器(F) |
1mF |
|
负载电阻(RL) |
100Omega; |
|
线对地交流电压(E) |
230V(rms) |
|
电源电压频率(f) |
50Hz |
|
直流母线电压 |
600V |
图3显示了在稳定状态下供电网正常和理想状态下所提出方法的性能。从图中可以看出,输入电流是一个平衡的三相波形,THD = 3.79%时失真很低。另外可以看出,直流母线电压以参考值(600V)控制,具有非常低的纹波。此外,在该图中显而易见的是,有功功率和无功功率值在其基准处被很好地控制并且具有低纹波,因此系统的单位功率因数操作得到满足。
在足够放大的图像中观察无功功率的稳态波形将显示该波形不能准确地被控制为零值(参考值)。这是由于在虚拟磁通量的计算过程中使用了反馈,这使虚拟磁通矢量的相位角出现了一些错误。
图3. 在电源电压正常条件下,PWM整流器在稳态下的输入和输出波形
(a)THD = 3.79的三相输入电流;(b)直流母线电压;(c)输入有功和无
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[466691],资料为PDF文档或Word文档,PDF文档可免费转换为Word

