英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
基于离散空间矢量调制的双馈电机直接功率控制
摘要
本文提出了一种基于双馈感应发电机(DFIG)的风力发电系统的新型直接功率控制(DPC)策略。 使用估计的定子位置和有功和无功功率的误差,从最优开关表中选择转子侧变换器的开关向量。 少数电压矢量可能会导致不需要的功率和定子电流纹波。 本文将介绍应用离散空间矢量调制(DSVM)的电压矢量的增加数量。 然后在超同步和次同步帧中提出一个新的切换表。2 MW DFIG系统的仿真结果证明了在有功和无功功率,机器参数以及风速变化过程中所提出的控制策略的有效性和鲁棒性。
1.介绍
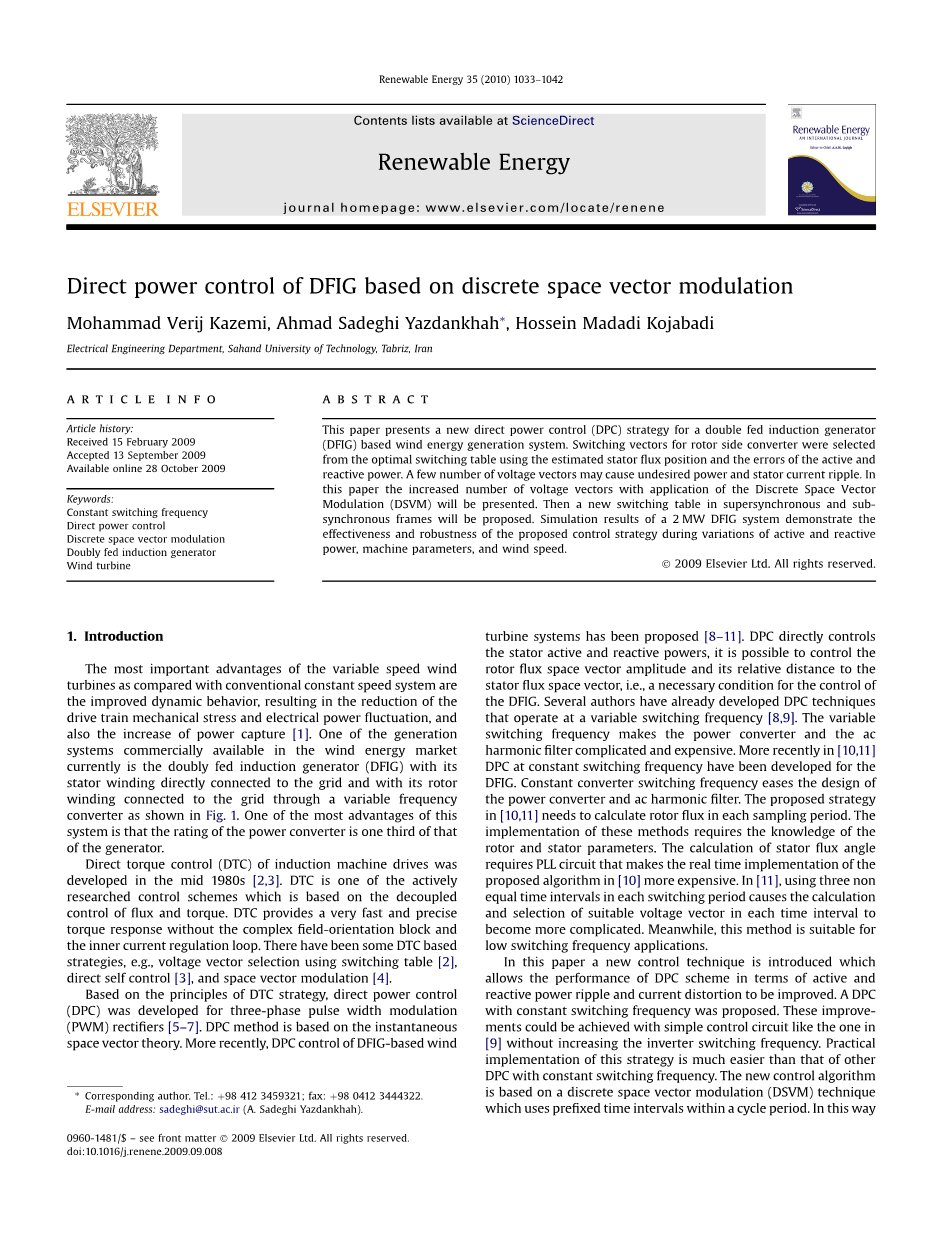
与传统恒速系统相比,变速风力涡轮机最重要的优点是改善了动态特性,从而减少了传动系机械应力和电功率波动,并且增加了功率捕获[1]。 目前风力发电市场上可用的发电系统之一是双馈感应发电机(DFIG),其定子绕组直接连接到电网,转子绕组通过变频器连接到电网,如图。1。 该系统的最大优点之一是功率变换器的额定功率是发电机的三分之一。
图1.基于DFIG的风力发电系统示意图。
感应电机驱动器的直接转矩控制(DTC)是在20世纪80年代中期开发的[2,3]。 DTC是基于磁链和转矩解耦控制的主动研究型控制方案之一。 DTC提供非常快速和精确的转矩响应,无需复杂的磁场定向模块和内部电流调节环路。 已经有一些基于DTC的策略,例如使用开关表的电压矢量选择[2],直接自我控制[3]和空间矢量调制[4].
基于DTC策略的原理,针对三相脉宽调制(PWM)直流系统开发了直接功率控制(DPC)[5–7]。 DPC方法基于瞬时空间矢量理论。 最近,DPC控制基于DFIG的风涡轮机系统已经被提出[8–11]。 DPC直接控制定子有功功率和无功功率,有可能控制转子磁链空间矢量幅值及其与定子磁链空间矢量的相对距离,即控制DFIG的必要条件。 几位作者已经开发了以可变开关频率工作的DPC技术[8,9]。 可变开关频率使得功率变换器和交流谐波滤波器复杂且昂贵。 最近在[10,11] 开关频率恒定的DPC已经开发用于DFIG。 恒定转换器开关频率简化了电源转换器和交流谐波滤波器的设计。 拟议中的战略[10,11] 需要在每个采样周期内计算转子磁链。 这些方法的实施需要了解转子和定子参数。 定子磁链角度的计算需要PLL电路,该电路使得所提出的算法的实时实现成为可能[10] 更贵。 在[11]在每个开关周期中使用三个不相等的时间间隔导致在每个时间间隔中合适的电压矢量的计算和选择变得更加复杂。 同时,这种方法适用于低开关频率的应用。
本文介绍了一种新的控制技术,可以提高DPC方案在有功和无功功率纹波和电流失真方面的性能。 提出了具有恒定开关频率的DPC。 这些改进可以通过简单的控制电路来实现[9] 而不增加逆变器开关频率。 这种策略的实际实现比具有恒定开关频率的其他DPC更容易。 新的控制算法基于离散空间矢量调制(DSVM)技术,该技术使用一个周期内的预定时间间隔。 通过这种方式,相对于常规DPC技术中使用的电压空间矢量,可以合成更多数量的电压空间矢量。 电压矢量的增加使我们能够定义更精确的开关表,其中根据转子速度,有功和无功功率误差来选择电压矢量。 切换表是从分析连接施加的电压矢量到相应的有功功率和无功功率变化的等式的分析得出的。 这些方程是使用机器的离散模型获得的,并对高采样频率有效。 尽管电压矢量和切换表元素的数量增加了,但是一些表格元素是相似的。 通过适当选择第六节讨论的表格中的元素,所提出的方法的复杂性比以前的方法要小[10,11] 并与参考文献相当。[9].
为了说明在转子速度,有功和无功功率,机器参数以及转换器直流环节电压变化期间所提出的控制策略的性能,介绍了一个2 MW DFIG发电系统的仿真结果。
- DFIG方程在转子参考系中的应用
DFIG的动态行为描述如下在转子参考系中根据空间矢量编写的等式:
(1)
(2)
(3)
(4)
其中Psi;r, Psi;s, Vr, Vs, Ir, Is, Rr, Rs分别是是转子和定子磁链,转子和定子电压,转子和定子电流以及转子和定子电阻。参考[12],来自网络的定子有功和无功功率输入可以计算为:
(5)
(6)
通过替换(1)–(4) 在等式中(5)和(6),并忽略定子电阻;
(7)
(8)
其中并且是同步角速度
3.直接有功和无功功率控制原理
根据(7)和(8)
(9)
(10)
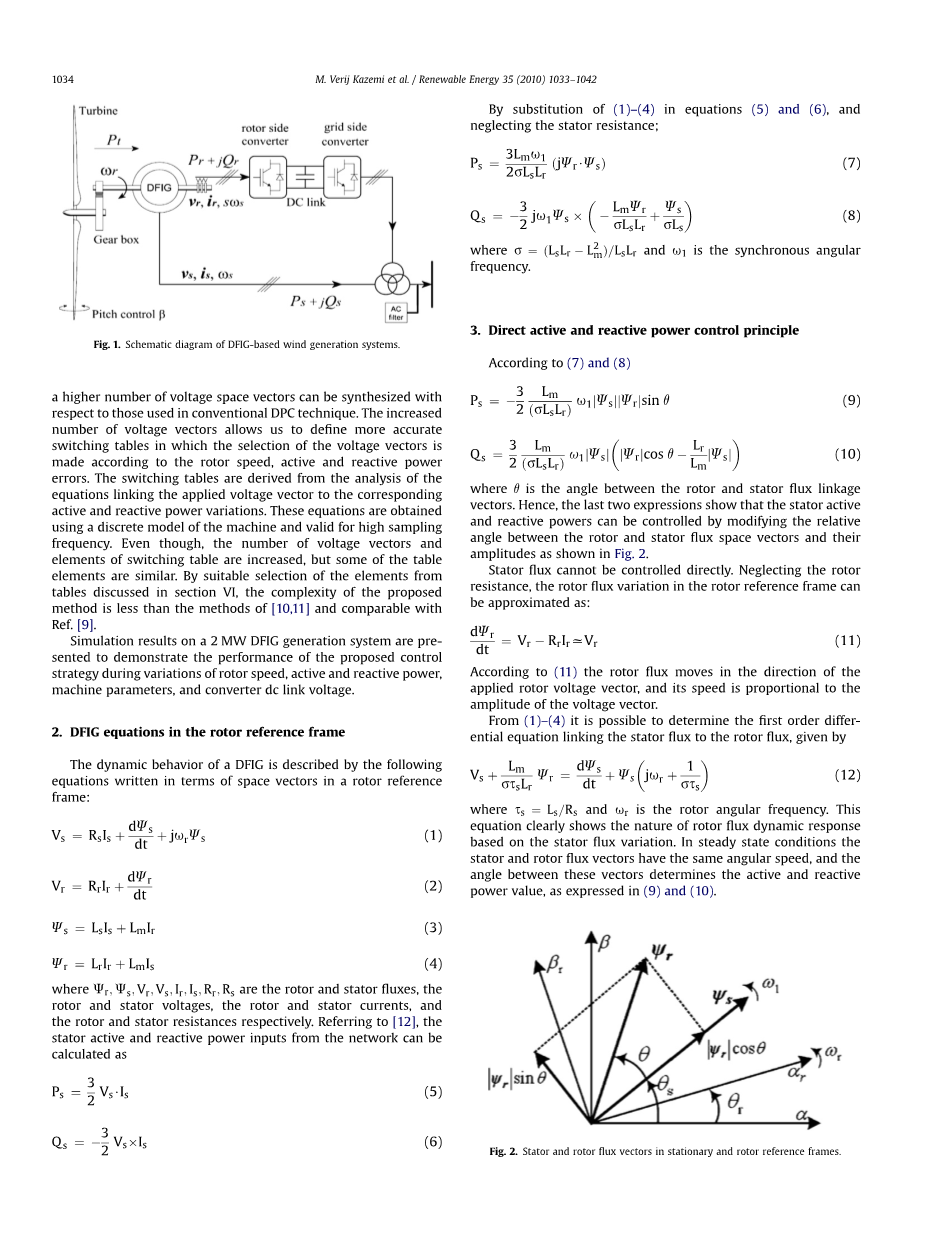
其中q是转子和定子的连接矢量之间的夹角。 因此,最后两个表达式表明定子有功和无功功率可以通过修改转子和定子之间的相对角度以及它们的幅度来控制,如图2.
图2静止和转子参考系中的定子和转子磁链矢量
定子磁链不能直接控制。 忽略转子电阻,转子参考系中的转子磁链变化可近似为
(11)
根据(11) 转子磁链沿施加的转子电压矢量的方向移动,并且其转速与电压矢量的幅度成比例。
从(1)–(4) 有可能确定连接定子磁链和转子磁链的一阶微分方程,由下式给出
(12)
其中且是转子角频率。这个方程清晰的展现了转子响应特性基于定子磁链的变化。在稳态条件下,定子和转子的矢量矢量具有相同的角速度,并且这些矢量之间的角度决定了有功和无功功率值,如(9)和(10).
在每个采样周期内,如果定子的位置已知,则选择每个电压矢量的影响基于转子磁链的变化可能导致|Psi;r|sintheta;和|Psi;r|costheta;组件将被改变。 因此,Ps和Qs在(9)和(10)会变化。
对于三相两电平转换器,可以选择八种开关组合。 其中两个确定零电压
向量并且剩余的产生具有相同幅度的六个等间隔的电压向量。 其被分成两部分,如图所示的六个地区图3. 图4 表明这两个三级滞后比较器用于生成相应的活动和无功功率状态Sp和Sq。 电压矢量的选择也取决于定子磁链,Sq和Sp的位置。图5显示了DPC控制策略的安排[9]。 假定定子磁链矢量位于扇区1中图3切换表可以写成表格1[9]. In 表格1,这个符号Z代表两个零电压矢量Vo和V7中的一个。 选择最恰当的方法是为了尽量减少逆变器开关换向。
由于开关频率可变,定子电流中的谐波也根据工作条件而变化。 由于必须吸收,所以过滤器的设计非常复杂宽带频率组件阻止他们进入网络。 由于使用少量的电压矢量切换表适用于所有转子速度的零矢量,并且还针对所有小的和大的功率变化使用一个电压矢量,因此有功和无功功率波动非常普遍。 在本文中,我们采取了一种新的方法来减少1)主动和主动无功功率脉动和2)定子和转子电流谐波。 在部分IV为了确定施加的电压矢量与有功和无功功率的相应变化之间的内在关系,进行了详细的分析。 通过使用这个分析的结果,可以定义更准确的切换表。
图4.有功和无功功率滞后控制。
图5.原始DPC控制策略的示意图[9].
4.有功和无功功率变化分析
状态变量形式的DFIG离散方程可以通过开发来确定(1)–(4)。 对于采样周期的小值Dt,tk 1时刻的定子和转子通量可表示为:
(13)
(14)
参照有功功率,在tk 1时刻,方程式(7)可能被改写为:
(15)
代(13)和(14)入(15) 并忽略与Dt的平方成比例的项,在时间tk 1处的有功功率由下式给出
$J
当时。 我们可以解释(16) 如:
(17)
表格1
基本切换表[9].
|
Sq = 1 |
Sq = 0 |
Sq = 1 |
|
|
SP = 1 SP = 0 SP = 1 |
V6 V1 V2 |
V5 Z V3 |
V5 V4 V3 |
图6.在子同步和超同步速度下的用户方向,旋转方向。
(18)
(19)
第一个贡献是不可控制的。 这个贡献与时间tk处的有功功率值成比例并且与Vr k和ur无关。 第二个贡献表示施加的电压矢量对有功功率变化的影响。并取决于操作条件。 对于给定的电压矢量,该贡献主要受转子速度通过动态电动势的影响。
参照无功功率,在时刻tk 1,(8) 可以改写为
(20)
由于网络电压是对称的,忽略了定子电阻效应.和时恒定的。所以的变化对没有影响。代(13)和(14)入,并忽略了的影响
(21)
所以,
(22) (23)
(24)
图7.有功功率变化的图形表示。
图8.无功功率变化的图形表示。
图9.使用DSVM获得的电压矢量,每个周期有三个相等的时间间隔。
图10.各种速度下电压矢量对有功和无功功率变化的影响。 (a)第一半扇区1中的超同步速度,定子磁链。(b)第二半扇区1中的次同步速度,定子磁链。(c)第二半扇区1中的超同步速度,定子磁链。(d)次同步速度,定子磁链在下半部分1。
与有功功率相同,无功功率变化由两部分组成。 第一个贡献是不可控的,第二个贡献依赖于Vrk和。 因此,在各种转子速度下,可由逆变器控制。
和之间的角度由Pk的值和Qk定义。 在稳态条件下,转子和定子的角频率等于同步角频率。 因此磁链空间矢量在同步参考系中是恒定的,但它们在转子参考系中以角频率( )旋转。 假设磁链空间矢量和转子顺时针旋转计数器。图6 演示转子参考系中的用户旋转方向。 这些方向决定了你的标志(19) 和(24)。然后在这些方程中,如果转子速度大于同步转速,ur为负值,如果转子转速小于同步转速,则ur为正值。
对于负的,图形表示(19)和(24) 在中图 7和8分别给出。 假定转子磁链向量位于d轴上。 线代表了确定和的空值的转子电压矢量的轨迹图7平行于的方向,但是在图8它与的方向正交这些位置取决于通过动态电动势的转子速度。 据此,电压矢量幅度变大(9)–(11),增加电压矢量的幅值导致有功和无功功率变化变大。
注意,某些电压矢量可能会在次同步和超同步中确定不同的效果。 在确定电压矢量选择策略时应该考虑这种影响。
- 离散空间矢量调制技术
从前面的分析中可以清楚地理解转子转速变化时给定电压矢量产生的影响。 每个采样周期的有功和无功功率误差补偿强烈依赖于可用电压矢量的数量。 使用非传统功率电路拓扑结构可以生成大量的电压矢量[13] 和[14].
在本文中,使用标准的VSI拓扑结构并引入简化的空间矢量调制技术来增加电压矢量的数量。 根据操作原理,在每个采样周期,可以通过对预定时间间隔应用几个电压矢量来合成新的电压矢量。 这样就采用了一种离散空间矢量调制(Discrete Space Vector Modulation,DSVM),这只需要少量的计算时间增加,然后应该增加采样周期
全文共9579字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[12075],资料为PDF文档或Word文档,PDF文档可免费转换为Word

