英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
基于数字信号处理的
IPMSM 无传感器宽范围控制
王高林 杨荣峰 徐殿国 IEEE会员
摘要 为了提高无位置传感器内置式永磁同步电机(IPMSM)的低速运行性能,最近提出一种基于数字信号处理的转子位置鲁棒观测方法。采用注入脉振高频电压信号的方式,通过高频电流的幅值信息获取转子位置误差信号,对信号处理及数字滤波器设计进行分析。在此基础上,研究一种具有较强抗负载扰动能力的转子位置观测器,通过考虑负载扰动转矩动态特性,给出位置鲁棒观测器的理论设计方法,根据实际扰动转矩特点及位置观测期望误差,采用极点配置法设计反馈矩阵系数。通过 IPMSM 无位置传感器矢量控制系统进行了实验,结果验证了该控制策略的有效性。
关键词:数字控制 内置永磁同步电机(IPMSM)驱动 位置传感器 宽范围运行
1 引言
内置式永磁同步电机具有高效节能以及调速范 围宽等优点,在电动车驱动、舰船推进、数控系统 及家用电器等领域得到了广泛应用[1]。高性能永磁
同步电机矢量控制需转子位置及转速信息,通常通 过安装机械位置传感器来获取。然而,位置传感器 的安装会带来系统成本增加、可靠性降低、尺寸增 大以及抗干扰能力降低等问题[2]。为了进一步扩宽 永磁同步电机控制系统的应用领域,多种通过测量 电参数以获取转子位置和转速信息的无位置传感器 控制技术相继被提出。
永磁同步电机无传感器控制技术主要分为低速 高频信号注入法和中高速反电动势模型法两类[3-10]。
中高速运行时可通过反电动势模型对转子位置进行 观测,而低速运行时反电动势幅值太小,难以准确 获取位置信息。可利用永磁同步电机凸极特性实现 低速以及零速无传感器运行,Lorenz R. D.提出了通 过注入旋转高频电压信号的观测方法[7],Sul S. K. 提出了基于脉振高频电压信号注入的无传感器控制 方法[8],这两种信号注入法都适用于 IPMSM。高频 信号注入法的实现可以分为两个环节,首先需从高 频电流中提取转子位置误差信号,然后通过设计观 测器利用该误差信号获得位置信息。
在提取转子位置误差信号过程中,主要需考虑 信号简单处理方法、数字滤波器设计以及逆变器非 理想因素影响等问题。文献[11]介绍了从信噪比极 低的高频负序电流信号提取位置误差信息的数字滤
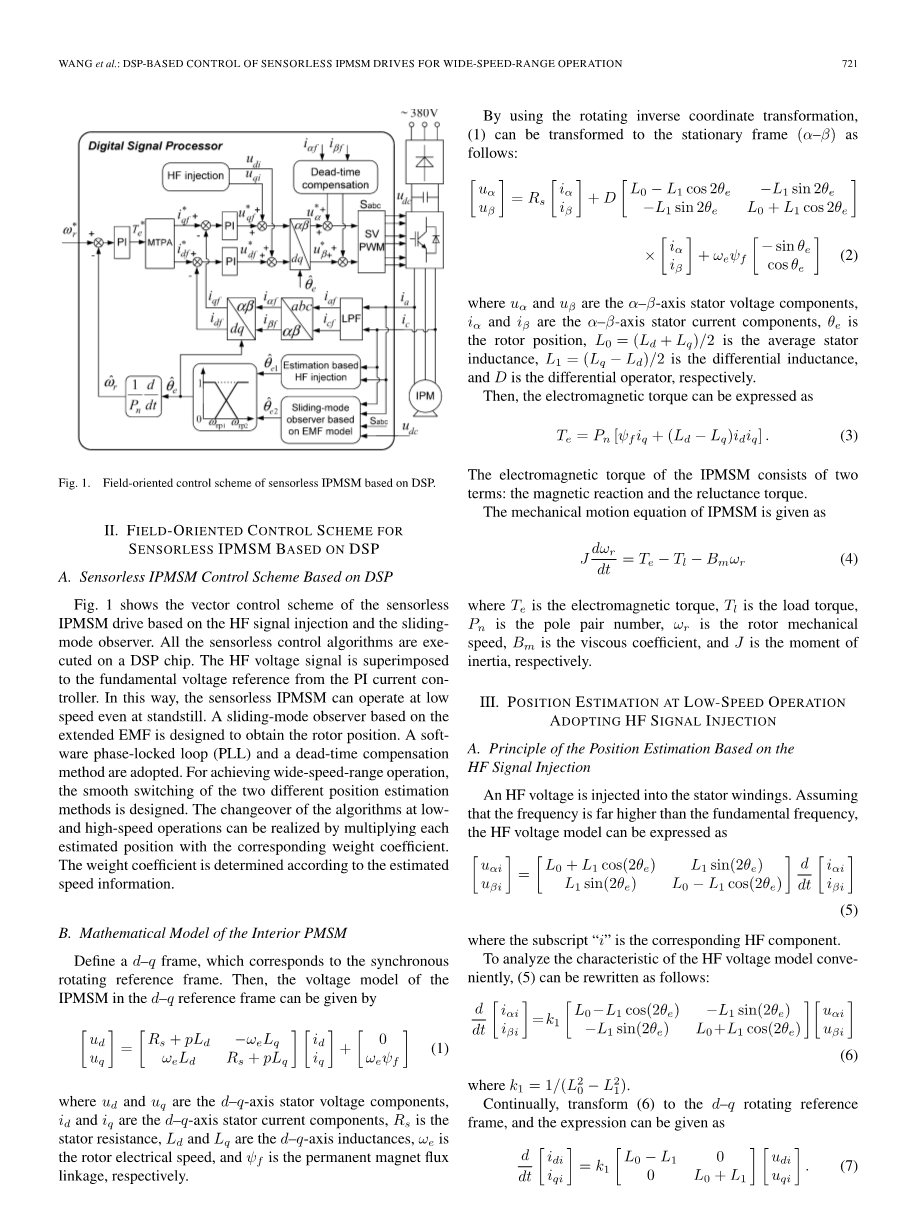
图 1 IPMSM 无位置传感器矢量控制系统框图
Fig.1 Scheme of IPMSM sensroless vector control system
IPMSM 在两相旋转坐标系下的电压模型为
ud id Ld
0 d id
0 Lq id 0
波器设计方法;文献[12]对 PWM 逆变器非线性所引
u Rs i
0
L d t i
e L
0 i
起的位置估计误差进行了分析与补偿。在获得转子
q q
q q d
q
e f
位置误差信号后的观测器设计环节中,目前主要采 用锁相环和 Luenberger 观测器两种方式,观测器结 构及参数对观测精度及鲁棒性有较大影响。然而, 现有文献对观测器参数详细的理论设计方法研究较 少,一般只考虑稳态观测精度,或者仅通过实验调 试来确定参数[13]。由于所提取的位置误差信号为三 角函数周期信号,因此观测器存在多个稳定收敛点,
式中 ud,uq——dq 轴电压分量;
id,iq——dq 轴电流分量;
e—— 转子电角速度;
f——转子永磁体磁链;
Ld,Lq——dq 轴定子电感;
Rs——定子电阻。
(1)
无法区分磁极的 N 极和 S 极,当负载转矩发生较大
突变时经常会导致观测误差增大,易使位置观测值
将式(1)变换到两相静止坐标系,可得
ualpha; ialpha; L0 L1 cos(2e )
R
L1 sin(2e )
d ialpha;
由 N 极收敛到 S 极,从而引起磁场定向控制发生失
s
调,最终导致转速失控[14]。
ubeta; ibeta;
L1 sin(2e )
L0 L1 cos(2e ) d t ibeta;
为了进一步改善 IPMSM 无传感器低速控制性
2L
sin(2e ) cos(2e ) ialpha;
e
e f
sin(e )
能,对基于脉振高频电压注入的转子位置鲁棒观测
cos(2e ) sin(2e )
ibeta;
cos(e )
器进行研究,给出一种通过高频电流幅值信息提取
位置误差的信号处理方法,在此基础上研究对负载 扰动具有较强鲁棒性的位置观测器,根据扰动转矩 动态特性和观测误差期望指标对观测器参数进行设 计,避免负载扰动过程中引起过大的观测误差,从 而可以有效地改善 IPMSM 无位置传感器低速运行 的控制性能。并通过 2.2kW IPMSM 矢量控制系统 对无位置传感器控制策略进行实验验证。
2 无位置传感器 IPMSM 矢量控制系统
(2) 式中 u,u——两相静止坐标系下电压分量;
i,i——两相静止坐标系下电流分量;
e——转子磁极位置电角度; L0——均值电感, L0 (Ld Lq ) 2 ; L1——差值电感, L1 (Ld Lq ) 2 。
往定子绕组注入高频电压信号,若所注入的高 频信号频率远高于基频,则 IPMSM 的高频电压模 型可以表示为
2.1 数字信号处理法原理分析
ualpha;i L0 L1 cos(2e )
L1 sin(2e )
d ialpha;i
图 1 为基于数字信号处理法的 IPMSM 无 位置传感器矢量控制系统结构图,通过提取高频电
ubeta;i
L1 sin(2e )
L0 L1 cos(2e ) d t ibeta;i
(3)
流信号的幅值信息以获取转子位置观测值,从而实 现 IPMSM 无传感器矢量控制系统的低速运行。
式中 ui,ui——静止坐标系下的高频电压分量; ii,ii——静止坐标系下的高频电流分量。
对式(3)进行变换,可以得到
如果误差角 e 接近零,则式(10)可近似为
d ialpha;i 1 L0 L1 cos(2e )
L1 sin(2e )
ualpha;i
d t i
L 2 L 2
L sin(2)
L L cos(2) u
d (i
- i ) 2 2L1Ui sin it
(11)
beta;i
0 1
0 1
1 e 0 1 e
beta;i
d t qmi dmi
L2 L2 e
(4) 将式(4)反变换到实际 d-q 坐标系中,可得到
因此,位置误差信号可根据式(11)通过提 取相应的高频电流分量幅值的差来获取,表示为
d idi 1 L0 L1
0 udi
(5)
(L 2 L 2 )
d t i
L 2 L 2 0
L L u
i 1 0 (I
- I ) k (I
- I )
(12)
qi
0 1
0 1
qi
2 2L1Ui
qmi dmi i qmi dmi
式中 udi,uqi——d-q 坐标系下高频电压分量;
idi,iqi——d-q 坐标系下高频电流分量。 如果定义旋转观测轴系为 de-qe 坐标系,将模型
(5)变换到 de-qe 坐标系,可得
d idei
d t i
qei
2.2 数字信号处理法信号处理分析
根据上述的方法,往定子绕组注入数字电压信号,通过定子电流采样值提取高频电流信号, 再由测量轴系的高频电流幅值分量作差获得位置误 差信号,其主要信号处理过程如图 2 所示。
1 L0 L1 cos(2e )
L1 sin(2e )
udei
L2 L2
L sin(2)
L L cos(2) u
0 1
1 e 0 1 e
qei
(6)
<p
全文共9631字,剩余内容已隐藏,支付完成后下载完整资料</p
资料编号:[11347],资料为PDF文档或Word文档,PDF文档可免费转换为Word

