英语原文共 8 页
使用人工神经网络进行电荷估算的电池状态
加拿大汉密尔顿的麦克马斯特大学的机械工程的Mahmoud Ismail,Rioch Dlyma,Ahmed Elrakaybi,Ryan Ahmed和Saeid Habibi。
电子邮件:ismailma@mcmaster.ca,dlymarl @ mcmaster.ca,elrakaya @ mcmaster.ca,ryan.ahmed @ mcmaster.ca和habibi@mcmaster.ca
汽车行业目前正在经历从传统,柴油和汽油推进车辆到第二代混合动力和电动车辆的模式转变。由于电池组代表了电动车辆动力系中最重要和最昂贵的部件,因此需要进行广泛的监控和控制。因此,正在进行电动车辆电池状态监测和控制领域的广泛研究。在本文中,人工神经网络(ANN)用于锂离子(Li-Ion)电池充电状态(SOC)估计。当使用本文中描述的随机电流曲线进行适当训练时,单层神经网络能够捕获电池的非线性特征。ANN能够基于诸如电压和电流的电池可测量参数来估计诸如电池SOC水平之类的不可测量参数。本文中的ANN使用实验电池生成的实验数据进行训练,该实验电池使用具有SOC / OCV关系的R-RC模型。SOC / OCV关系源自商用3.6V 3.4Ah锂离子电池。使用电流和电压作为输入并且SOC作为输出来训练网络。使用基准驾驶循环测试训练的网络,能以相对高的准确度估计电池SOC。
一、导言
由于全球对传统燃料供应和排放的担忧,电动汽车(EVs)和混合动力汽车(HEVs)的需求正在增长[1,2]。为了成功用电动汽车取代传统的内燃机车辆,后者应该与前者一样可靠且具有成本效益。目前,一致认同的电动汽车的主要挑战在于由于使用最昂贵部件的电池系统而导致的初始成本。制造商倾向于过度设计电动汽车中的电池系统以补偿电池系统建模中的不确定性。因此,提高电池系统建模精度可以缩小包装尺寸,从而直接降低系统成本,从而降低车辆成本[3,4]。
电池管理系统(BMS)负责实时估计车辆电池中存储的能量。由于许多方面,这是一项相对复杂的任务。首先,没有测量方法可以直接测量电池组中存储的能量。目前存在两种方法,用于从诸如电流和电压的可测量变量直接评估电池组SOC; 即:库仑计数和基于回归电压的充电状态-开路电压(SOC-OCV)映射。第一种方法是电流依赖于电池中存储的能量是基于随时间积分充电/放电电流值来计算的,如等式(1)[5]所示:
(1)
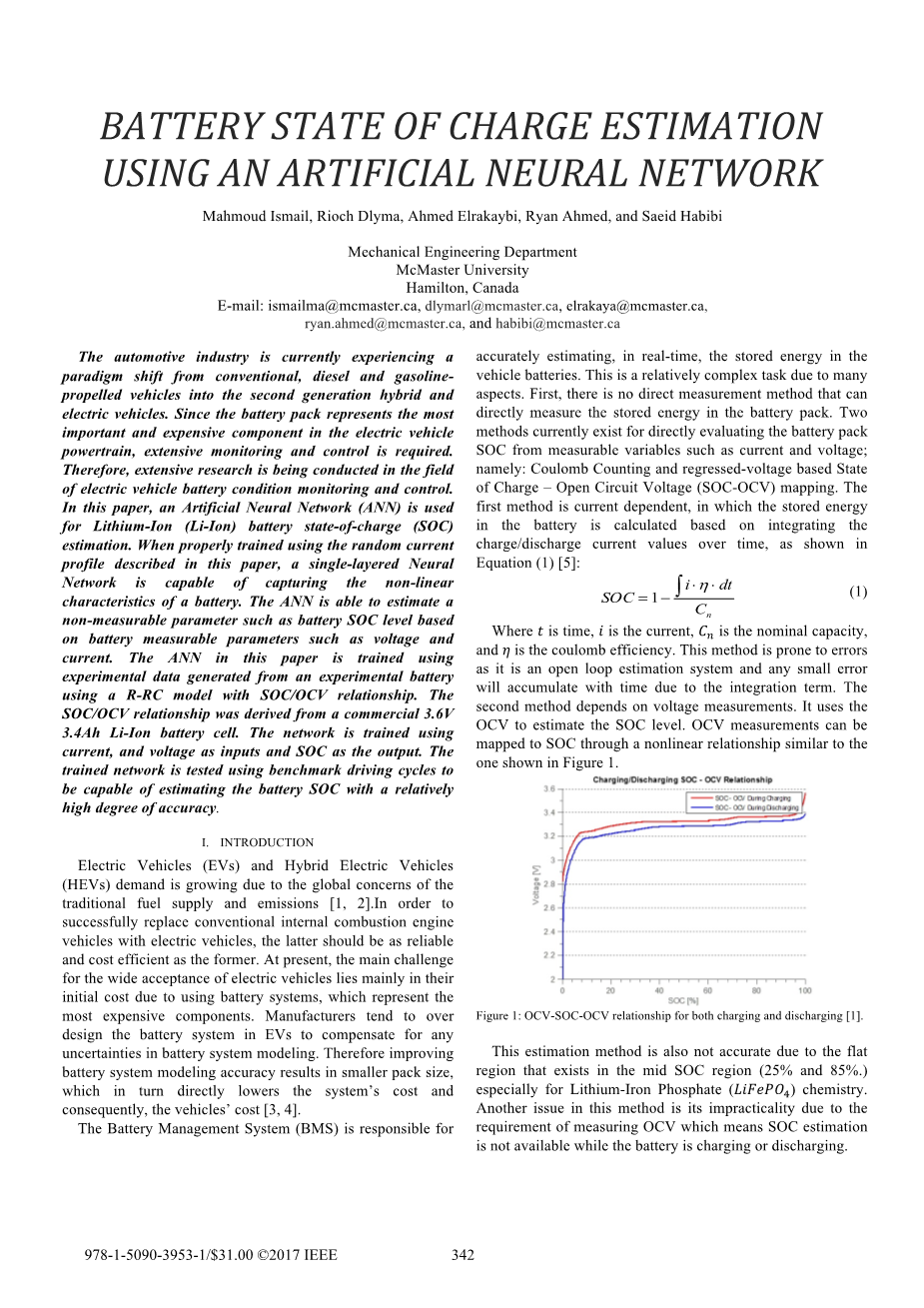
其中?是时间,?是电流,是标称容量,是库仑效率。这种方法容易出错,因为它是一个开环估计系统,由于积分项,任何小的误差都会随时间累积。第二种方法取决于电压测量。它使用OCV来估算SOC水平。OCV测量可以通过类似于图1所示的非线性关系映射到SOC。
图1:充电和放电的OCV-SOC-OCV关系[1]
由于存在于中间SOC区域(25%和85%)的平坦区域,该估计方法也不准确,特别是对于磷酸铁锂()化学。该方法的另一个问题是由于需要测量OCV而不切实际,这意味着在电池充电或放电时SOC估计不可用。
这些原因是构建稳健估算器以准确预测EV电池SOC水平的动机。在文献中,已经提出了各种电池模型,例如基于等效电路的模型,行为(经验)模型和电化学模型,[6]。这些模型要么直接估算SOC水平,要么与估算器算法(如卡尔曼滤波器(KF))相结合。
在本文中,使用人工神经网络建立电池模型。SOC估计误差是主要的性能标准以及其他标准,例如计算效率,所需的训练数据量和计算复杂度。
本文的结构如下:第一部分提供了论文的背景和概述,第二节介绍了本文中使用的实验电池,然后是第三节中的电动车辆模型和数据生成,第四部分涉及EV中电池系统中神经网络应用的文献综述,随后是简要的神经网络解剖学科学基础和神经网络类型,第五节提供了Matlab中的人工神经网络概述第六部分概述了实验,以及用于获得我们结果的独特电流曲线。最后,第七节包括未来工作的结论和建议。
二、实验电池
训练神经网络来表示电池模型需要大量的实验数据,这可以通过扩展电池测试来实现。工业电池测试仪通常用于收集此数据。电池测试仪能够以不同的充电/放电电流速率对电池充电/放电。他们还能够使用代表驾驶周期的电流曲线,以便在真实世界条件下见证电池性能。稍后将更详细地讨论驾驶循环
从真实电池收集所需的充电/放电循环数据将非常耗时,而我们选择使用实验电池产生电池近似数据。这是生成实验数据以测试不同电池状态监测技术的常用方法。实验电池是电池近似模型,其能够产生与实际电池类似的行为。在文献中有许多电池模型,它们主要是为电池SOC估算技术开发的。电池建模技术的例子是:
- 电化学模型
- 随机模型
- 分析模型
- 电路模型
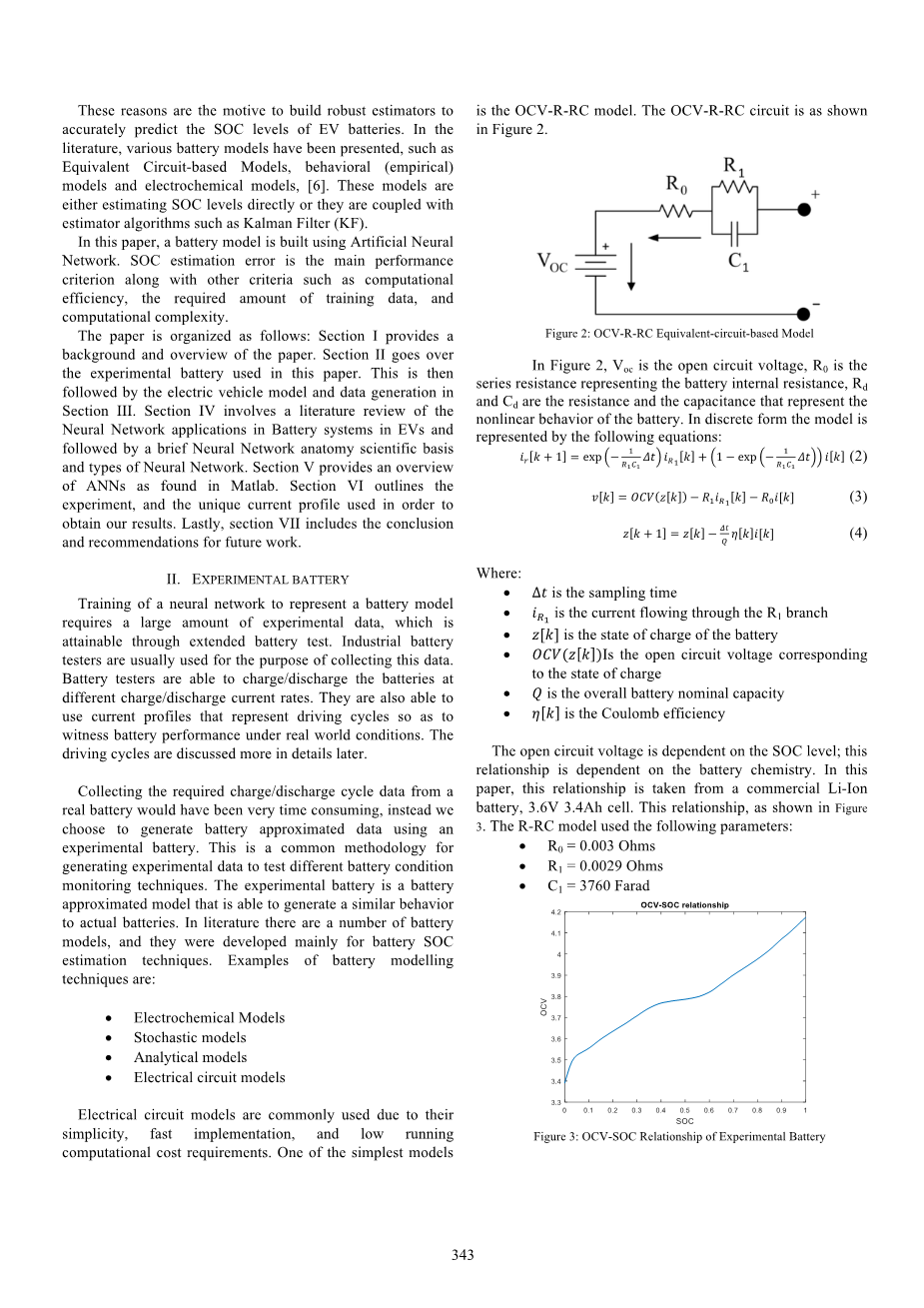
电路模型由于其简单,快速实现和低运行计算成本要求而被普遍使用。最简单的模型之一是OCV-R-RC模型。OCV-R-RC电路如图2所示。
图2:基于OCV-R-RC等效电路的模型
在图2中,是开路电压,是代表电池内阻的串联电阻,和是代表电池非线性行为的电阻和电容。在离散形式中,模型由以下等式表示:
其中:
bull; Delta;?是采样时间
bull; 是流经分支的电流
bull; ?[?]是电池的充电状态
bull; ???(?[?])开路电压是否与充电状态相对应
bull; ?是整体电池额定容量
bull; eta;[?]是库仑效率
开路电压取决于SOC水平; 这种关系取决于电池的化学性质。在本文中,这种关系来自商用锂离子电池,3.6V 3.4Ah电池。这种关系如图3所示.R-RC模型使用以下参数:bull; R0 = 0.003欧姆
图3:实验电池的OCV-SOC关系
三、 电动汽车的建模与当前发电
通常使用常见的驾驶循环来测试电池模型的性能。这些包括:城市测功机驾驶时间表(UDDS),高速和高负荷的轻型驾驶循环(US06),以及公路燃油经济性测试(HWFET),[7]。 图4显示了上述驾驶循环的速度与时间的关系。对于该实验,创建了这些循环的组合,称为“混合驾驶循环”。
UDDS,US06和HWFET周期的Velocity Pro文件
图4:UDDS,US06和HWFET周期的速度曲线,[7]
UDDS循环用于模拟该城市普通北美司机的驾驶习惯。 US06用于描述激进的高加速驾驶习惯,HWFET用于模拟高速公路驾驶条件,[7]。为了从这些驱动周期的速度曲线生成电流曲线,中型电池电动汽车(BEV)在MATLAB / Simulink / SimScape中建模,如图5所示,采样率为0.1秒。电动汽车模型已经从[8]中提出的混合动力电动汽车模型进行了修改。
图5:Simscape中的全电动中型轿车仿真模型(摘自[8])
电动车型包括锂离子电池组,DC-DC转换器,车辆动力学模型,车辆控制器和电动机。BEV行驶里程每次充满电约200公里。通过缩小电池组电流曲线获得电池级电流曲线,假设整个电池组保持电池平衡。从模型生成的当前配置文件如下所示图6
图6:UDDS,US06和HWFET周期的封装电流曲线
四、神经网络
- 电池系统中的神经网络应用
人工神经网络(ANN)是智能机器学习工具,已用于各种应用,如系统建模[9],分类[10]和控制[11]。人工神经网络是自适应的,自学习的,可以适应任何非线性系统。人工神经网络不需要任何模拟系统的物理知识,这使它们成为复杂系统的理想选择。然而,作为一种自学习工具,人工神经网络需要系统数据来学习。所需的学习数据量通常取决于建模系统的复杂程度。
随着ANN的发展,已经开发出新的电池估计技术。对于荷电状态(SOC)估计,例如研究了不同类型的人工神经网络技术;在[12] B. Sun等人。将SOC工作范围分为三个部分,并通过每个部分使用反向传播神经网络(BPNN),他们可以估算出具有可接受的NiMH电池精度的SOC。
Wen-Yeau等。[13]使用反向传播神经网络(BPNN)和径向基函数神经网络(RBFNN)来估计电池的SOC。
在[14]中,自适应小波神经网络(AWNN)用于锂电池SOC估计,提高了传统技术的收敛速度和精度。
在[15]中,与BPNN相比,Elman神经网络(ENN)表现出良好的动态特性和更准确的SOC估计结果。 Liu,Zhao和Huang [16]在铅酸电池系统中使用RBFNN,通过训练网络的时变曲线来考虑基于时间的特性。
还研究了混合技术,其中人工神经网络与其他算法如扩展卡尔曼滤波器(EKF)[17]相结合,以实现电池系统的有效动态操作。该研究显示准确的SOC估计,估计误差为1%。在[18]中,Xu,Wang和Cheng使用EKF和随机模糊神经网络(SFNN)在NiMH电池上估算SOC,以捕获系统的动态而不是常规ANN。该技术证明了增强的准确度,最大估计误差为0.6%。
使用Unscented卡尔曼滤波器(UKF)和ANN的另一项研究由W. He,N。Williard,C。Chen和M. Pecht [19]完成,以提高估计精度并减少锂离子电池系统的估计方差,他们的模型显示在不同温度下RMS误差为2.5%,最大误差为3.5%
B.神经网络科学基础
多层人工神经网络(ANN)通常由输入层,一个或多个隐藏层和输出层组成,[20]。 如图7所示,前馈ANN由许多传感单元组成,其中应用了非线性激活功能。 这些节点通过链路(权重)连接到相邻层,[20]。 在前馈网络中,输入和输出之间存在静态映射,其中输入信号从输入层通过隐藏层扩展,然后以正向和逐层方式扩展到输出,[20]。
设k表示隐藏,输入和输出层的总数。 Node(n,i)表示层中的节点,是层中的节点总数。如图8所示,node(n 1,i)计算以下等式,[20]:
图7:前馈多层感知器网络的示意图,[20]:
图8:节点表示(n 1,i),[20]
其中,表示节点(n,i)的节点偏移(偏差),表示节点(n,j)的输出,表示来自节点(n,j)的链路权重到节点(n 1,i)。函数是由[20]定义的非线性S形激活函数:
为简单起见,通过将最后一个输入设置为????(n 1,i),将node设置为值为1,将节点偏差视为链路权重,如下所示:
因此,等式(2)可以用以下形式重写:
C.神经网络的类型
神经系统分类最常用的方法之一网络是学习算法的类型,因为这是决定网络在特定任务中的应用和有用性的主要特征之一。例如,神经网络在没有人为干扰的情况下自动学习和从输入数据中得出结论的能力对数据挖掘应用非常有益。
D.监督
监督学习是一种机器学习算法,其中神经网络被给予通常称为数据集的输入和输出数据的集合。由此,神经网络试图建立一个以与其一致的方式预测输出值的模型。通常,训练中使用的数据集越大,模型的准确度就越高。以下是常见监督ANN类型的一些示例。监督网络的一些示例是前馈神经网络,径向基函数(RBF)网络,学习矢量量化(LVQ)和动态神经网络。
图9:监督学习框图[22]
1)前馈神经网络
在这种类型的网络中,连接是从输入到输出的一种方式,并且不形成循环。 它可以通过增加隐藏层的数量来组成单层或多层。第四节详细解释了这种类型的网络。B.
1)径向基函数(RBF)网络
RBF神经网络是使用径向基函数作为激活函数的类型。该网络训练分两步进行,第一步是在隐藏层内,其中以无人监督的方式统计地确定中心向量的值。 其次,基于距该中心向量的距离,确定每个神经元的权重。
此网络的输出功能是输入的标量函数。例如,对于单个隐藏层;
其中N是神经元的数量,w是每个神经元的权重,是从中心点开始的径向基函数
E.无人监督
无监督学习是一种机器学习算法,其中神经网络试图表示仅由特定模式或关系中的输入组成的数据集,这取决于给定数据集的统计结构。无监督神经网络的一些常见示例是竞争层和自组织映射。
图10:竞争层NN的输出 图表代表输入矢量与重量,它似乎是聚集的
图11:使用主成分分析的简化数据集。
12 :.Clustered data使用自组织映射神经网络
五、人工神经网络、MATLAB
在本文中,商业软件MathWorks使用Matlabreg;。 Matlab提供了不同的库不同方法的神经网络类型应用和测试。本节简要介绍测试类型。神经网络的库是基于在功能分类上,细分为:
bull;NN配件工具
bull;NN模式识别工具
bull;NN群集工具
bull;NN时间序列工具
对于电池SOC估计,模式识别工具和群集工具超出了范围。 神经网络拟合,和时间序列工具进行了不同的输入测试用作本文的一部分。 以下是简要概述他们如何工作:
- 时间序列工具
当输出是时间序列时,使用时间序列工具参数; 也就是说,它的价值取决于时间历史其他投入。在Matlab中有三个主要的子类别这一类,(1)非线性自回归与外部输入(NARX),(2)非线性自回归(NAR)和(3)非线性输入输出。 他们的架构如图所示图13.第二种选择不适用于电池SOC估计作为输出仅取决于其自身时间历史,但电池的SOC水平取决于许
资料编号:[5825]

