
英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
国际控制与自动化杂志
第八卷,2015年第1期,第197-210页
http://dx.doi.org/10.14257/ijca.2015.8.1.18
基于空间矢量脉宽调制的双三相永磁同步电机串联控制的方法分析
Huaqing Zhang1,Shijun Luo1,Yaxin Yu1和Lingshun Liu2
哈尔滨工业大学威海校区电气工程系1,山东威海264209
海军航空航天大学控制工程系2,山东烟台264001
zhq@hit.edu.cn; luoshijun101001@163.com; yyxjane@163.com; lingshunliu@sohu.com
摘 要
六相电压源逆变器(VSI)可以通过使用适当的相位变换规则和单电源供电来实现两电机双三相永磁同步电机(PMSM)串联系统的解耦控制,这解决了两个电动机串联的控制问题。由于三相系统中常用的传统两矢量SVPWM策略在平面中存在5次和7次谐波,因此很难实现两电机双三相PMSM串联系统的解耦控制。同时,基于载波的PWM策略中直流母线电压利用率较低。因此,本文提出了一种采用带两个调制器的TBTSB-SVPWM策略的方法。确保变频器输出电压仅包含两个具有单个VSI的串联电动机所需的两种基本成分,从而可以实现两电动机双三相PMSM串联系统的去耦控制。仿真结果表明,在改变任何一台电动机的速度/负载的同时,对另一台电动机没有影响,实现了串联系统的解耦控制,验证了该方法的可行性和有效性。
关键词:双三相永磁同步电动机串联系统;空间矢量脉冲宽度调制;单逆变器;解耦控制。
介绍
在电动船舶推进系统、以及多电飞机的驱动系统和机车牵引系统中[1-16],始终需要多个电动机在不同的工作条件下独立运行。通常,一台电动机在低速/高转矩条件下工作,而另一台电动机在高速/低转矩条件下工作。当前,主要有两种类型的多电动机系统。第一个是,每个电动机由共享同一直流母线的各个逆变器独立驱动,在这样的系统中,允许所有电动机具有不同的额定参数,速度和转矩。然而,使用多个逆变器极大地增加了驱动系统的体积和成本。第二个是多电机并联系统,由多相VSI提供单电源供电。为了独立地控制所有并联电动机,并联系统中也采用了串联系统中使用的相同相位变换规则。但是,与串联系统相比,并联系统存在一些严重的缺点[2]。首先,并联系统中每个电动机的相数必须等于逆变器的相数,而在具有单个VSI的串联系统中,可以串联连接具有不同相数的电动机,例如,可以连接不对称六相电动机与两相电动机。另外,最严重的问题与缺点,并联系统缺乏对电流分量的控制。由于这些电流分量由平面电压参考矢量和其他电动机的小阻抗决定,故它们的值始终很高。总之,在实际应用中很难实现并联系统中电动机的独立控制。
根据矢量控制理论,可以通过在旋转参考系中仅使用两个电流分量(一个是转矩电流,另一个是励磁电流)来控制任何n相电动机。随着相数的增加,多相电动机中存在的冗余电流分量可用于控制另一台机器。到目前为止,一些国外学者主要集中研究单VSI的两电机五相感应电动机串联系统。但是,对具有单个VSI的两电机双三相PMSM串联系统的研究很少。
在参考文献[5-7]中阐述了串联系统的相移规则和多相电动机的建模。为了输出纯正弦相电压和提高直流母线电压利用率,参考文献[8]-[13]中详细介绍了五相感应电动机,六相感应电动机和七相感应电动机的SVPWM技术。在[3,4,13-16]中,电流滞后控制,电流斜坡比较控制和SVPWM控制用于实现具有单个VSI的两电机五相感应电动机串联系统的独立去耦控制。本文主要研究两电机双三相永磁同步电动机串联系统。基于TBTSB-SVPWM(两个最大和两个第二大空间矢量脉宽调制)技术,向量控制策略,在Matlab / Simulink中进行了两电机双三相PMSM串联系统的仿真实验,最后验证了该方法的可行性和有效性。
双三相PMSM的串联控制
串联系统的理论分析
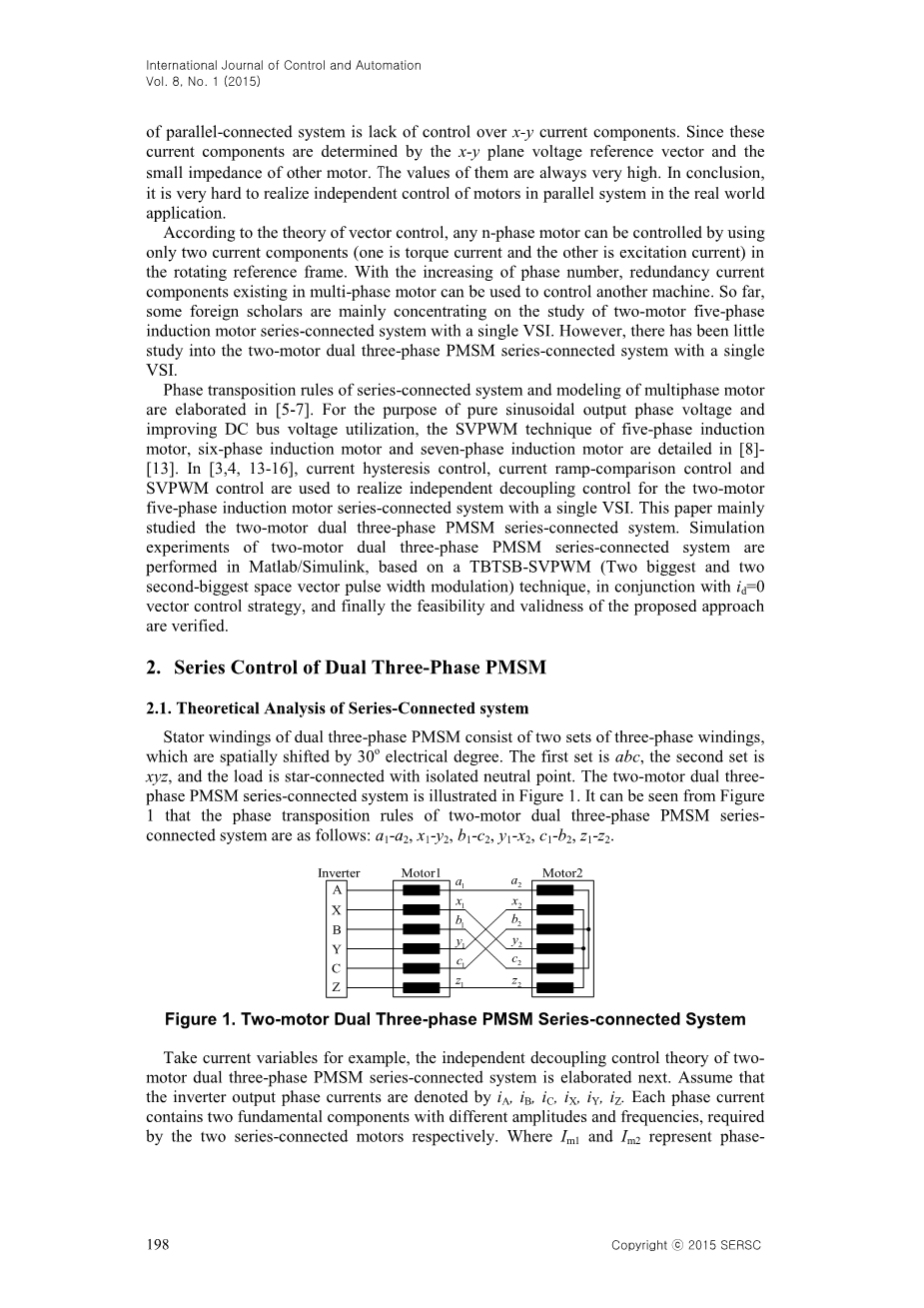
双三相PMSM的定子绕组由两组三相绕组组成,它们在空间上相差3Oo电度。第一组是,第二组是,负载与独立的中性点星形连接。两电机双三相PMSM串联系统如图1所示。从图1可以看出,两电机双三相PMSM串联系统的相变规则如下:。
图1.两电机双三相PMSM串联系统
以电流变量为例,接下来阐述两电机双三相永磁同步电动机串联系统的独立解耦控制理论。假设逆变器输出相电流由表示。每个相电流都包含两个串联电动机分别需要的,幅度和频率不同的两个基本分量。其中和表示电动机1和电动机2的相电流的有效值,,分别代表电机1和电机2的相电流基频。
(1)
解耦转换后,将表达式(1)转换为表达式(2)。
(2)
(3)
其中表示由表达式(3)和a = 30o给出的解耦变换矩阵。前两行代表平面中的当前分量;中间两行代表平面中的当前分量,最后两行代表零序分量。
从表达式(2)可以看出,单个电动机所需的不同频率和幅度相电流被映射到两个二维平面(平面和平面)。在串联系统中, 电流分量用于控制电机1,而电流分量用于控制电机2。由于平面和平面是正交的而没有相互耦合,因此可以独立地控制两个串联的电动机。
必须指出的是,以上分析是基于相电压是纯正弦波这一事实。但是,由于逆变器的输出电压始终含有一些谐波,因此难以实现串联系统的解耦控制。因此有必要研究谐波对串联系统的影响。
2.2.谐波影响
根据坐标变换理论,可以通过解耦变换矩阵解耦自然坐标系中的双三相永磁同步电动机的数学模型,并将其映射到三个正交平面(平面,平面和平面)。将6kplusmn;1阶(k = 2、4、6)的基波和谐波映射到平面,该平面生成旋转磁场并参与机电能量转换。阶数为6kplusmn;1(k = 1、3、5)的谐波被映射到平面中,其对磁通量的产生没有帮助,并且与机电能量转换没有关系,通常被称为广义零序分量。虽然3k阶(k = 1、2、3)的谐波被映射到平面,但在星形连接的多相系统中不存在,通常被称为零序分量[17-20]。
对于两电机双三相PMSM串联系统,当电机1在平面上运行,而电机2的6kplusmn;l(k = l,3、5)阶谐波映射到平面会导致磁通的产生并在电机1中引起转矩波动,从而使电机1无法稳定运行。同样,由于电机2在平面上运行,而电机1的6kplusmn;l(k = l,3、5)阶谐波被映射到平面中,这会导致磁通的产生并在电机2中引起转矩波动,因此电机2不稳定运行。
为了实现两个双三相PMSM串联系统的解耦控制,重要的是要确保逆变器输出电压仅包含每个电动机所需的两种基本分量。
2.3.串联系统的控制策略
图2中描绘了两电机双三相PMSM串联系统。本文采用基于的矢量控制策略,通过SVPWM调制器,可以获得适当的开关信号,并且逆变器分别生成两个串联电动机所需的两种相电压基本分量。在图2中,和分别为电机1和电机2给定的角速度和反馈角速度;和分别为电机1和电机2在d轴上的给定电流和反馈电流;和分别为电机1和电机2在q轴上给定电流和反馈电流。
d
图2.双三相PMSM的两电机串联系统
为了使逆变器输出的相电压仅包含两种不同频率和幅度的正弦基本分量,并且在对逆变器输出相电压进行解耦变换后,可以将这两种基本分量映射到平面和平面。要求平面中的调制器仅生成参考电压矢量,同时并使参考电压矢量等于零。类似地,平面中的调制器仅生成参考电压矢量,并使参考电压矢量等于零。
由于传统的SVPWM技术仅考虑参考电压矢量,而对参考电压矢量却缺乏控制,因此在相电压中会产生5次和7次谐波,从而无法实现串联系统的去耦控制。实际上,双三相PMSM的参考电压矢量是4维矢量,因此至少需要四个基本空间电压矢量才能完全控制它。因此,本文采用了以下控制策略,如图3所示,假设逆变器切换周期为。根据伏秒平衡定理,在第一开关周期中,通过在平面中选择一组四个基本空间电压矢量(两个最大的基本空间电压矢量和两个第二大的基本空间电压矢量)来合成参考电压矢量。在下一开关周期中,通过在平面中选择一组四个基本空间电压矢量(两个最大的基本空间电压矢量和两个第二大的基本空间电压矢量)来合成参考电压矢量。开关信号的选择如图3所示。这表明该SVPWM方法由两个调制器组成(调制器用于控制电机1,调制器用于控制电机2)。
图3.逆变器开关信号的选择
- 串联系统的SVPWM技术
基本空间电压矢量的分布
六相VSI如图4所示。电机的相电压用小写字母(a,b,c,x,y,z)表示,而逆变器支路电压用大写字母(A,B,C,X,Y,Z)表示。电动机相电压和逆变器支路电压之间的关系可以用表达式(4)描述。
逆变器支路电压(K= A,B,C,X,Y,Z)取plusmn;0.5。
(4)
图4.六相电压源逆变器的拓扑
通常,n相两电平VSI总共具有2n个基本空间电压矢量。因此,对于六相VSI,存在64个基本空间电压矢量,其中60个是非零空间电压矢量,而其中4个是零空间电压矢量。逆变器的每个开关状态可以用一组八进制数表示,例如空间电压矢量可以被描述为,表明A相和X相的上部开关为“ on”,A相和X相的下部开关为“ off”;同时,B相,C相,Y相,Z相的上部开关为“off”,B相,C相,Y相,Z相的下部开关为“on”。结合表达式(4)和表达式(5),很容易计算出与逆变器开关状态相对应的所有基本空间电压矢量。图5显示了平面和平面中的所有基本空间电压矢量。从图5可以看出,平面中幅值最大的空间电压矢量映射为平面中幅值最小的空间电压矢量,并且平面中幅值最小的空间电压向量映射为平面中的幅值最大的空间电压向量,而其余的基本空间电压矢量的幅值保持不变。
(5)
a)平面 b)平面
图5.基本空间电压矢量的分布
3.2.参考电压矢量的综合
以第二部分为例,详细介绍TBTSB-SVPWM策略。参考电压矢量和四个基本空间电压矢量之间的关系为如图6所示,其中表示平面中的四个基本空间电压矢量,分别用表示它们在平面上的投影。平面和平面中的四个基本空间电压矢量的振幅值在表1和表2中给出。
表1. 平面中四个基本空间电压矢量的振幅值
向量 |
振幅值 |
|
|
|
|
|
|
表2. 平面中四个基本空间电压矢量的振幅值
向量 |
振幅值 |
|
|
|
|
|
|
a)平面 b)平面
图6.参考电压矢量与四个基本空间电压矢量之间的关系
假设逆变器的开关周期为,四个基本空间电压矢量的施加时间分别用表示,零空间电压矢量施加时间为。它们之间的关系可以描述为。根据伏秒平衡定理,可以用表达式(6)和表达式(7)计算两个同相基本空间电压矢量的总施加时间。
(6)
(7)
其中k是扇区号,k = l,2,3hellip;hellip;l2,参考电压矢量与轴之间的角度用表示。
从图6可以看出,平面中的两个同相基本空间电压矢量在平面中具有180度的相差。这意味着,如果两个同相基本空间电压矢量的施加时间与幅度值成反比,则可以使平面中参考电压矢量的幅值为零。因此,逆变器输出相电压不包含5次和7次谐波,并且相电压为纯正弦波。
因此,可以利用以下原理分配四个基本空间电压矢量的施加时间。
(8)
(9)
(10)
(11)
由于四个基本空间电压矢量的总施加时间小于逆变器切换周期,因此当总施加时间大于时,有必要对四个基本空间电压矢量的施加时间进行调整。
(12)
有表达式(13)
(13)
将表
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[236191],资料为PDF文档或Word文档,PDF文档可免费转换为Word

