
英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
直流电动机双闭环调速系统动态性能调节控制
段胜蒙1,王牛1,2
- 重庆大学自动化学院,重庆400030 E-mail:person0910@qq.com
- 重庆大学自动化学院,重庆400030 E-mail:wangniu_author@163.com
摘要:针对直流电机调速系统动态性能控制问题,分析了直流电机双闭环调速系统的特点,通过控制直流电机双闭环调速系统的动态性能。电枢电流。本文介绍了调整系统动态性能的方法。该方法在直流电动机双闭环调速系统中引入电流动态控制调节环节,调节电流反馈系数,使电流按给定值输出,从而调节电动机加速过程动态性能调节目的。实验表明,所提出的控制方法是有效的。
关键词:双闭环速度控制系统,可调动态性能,电流动态控制
1 介绍
在直流电动机的实际应用中,为了获得更好的静态和动态性能,往往需要建立电流,速度双闭环速度控制系统来控制直流电动机。
在直流电机控制过程中,电流控制策略越来越普遍,也反映了电流控制在整个系统控制中的重要作用。本文提出了一种双有效矢量调制(TEVM)电流控制方案,用于无刷直流(BLDC)电机和低成本四开关三相(FSTP)逆变器。为了抑制换向转矩脉动,提出了一种具有双电流调节器的BLDCM(无刷直流电动机)控制方案。开关磁阻电机(SRM)的双凸极结构及其易磁饱和特性引起非线性电感曲线,输出转矩随电流变化在传统的双闭环速度控制系统中,由于非理想的梯形波反电动势和非理想方波,具有非整流相电流反馈的无刷直流电动机具有较大的转矩脉动。相电流。当无刷直流的通电阶段变为浮动阶段时,是否存在非换向持续时间的电流会对电动机的运行性能产生很大影响。调整电流反馈系数以间接控制电流的大小。为了更好地设计和研究整个系统,我们需要建立双重动态模型闭环速度控制系统。直流电动机双闭环系统通过特征分析和“类等效”建模等效于具有非线性特征的简单状态空间模型。通过考虑负载变化来改进双闭环速度控制系统模型。
直流电动机双闭环速度控制系统(DLDMCS)由于其良好的动态性能,是目前应用最广泛的直流电动机调速系统。DLDMCS具有饱和非线性。在控制过程中,通常希望电动机以其允许的最大加速电流加速到目标速度。文献[J]中提出了模糊控制,神经网络控制和遗传算法控制在直流电动机双闭环速度控制系统中的应用,并对系统的快速稳定性进行了仿真研究。在实际应用中,通常不可能忽略作为变化过程的电动机速度的动态变化,尤其是需要协调多个电动机系统的情况。
通过分析典型DLDMCS的动态特性,本文在直流电机双闭环速度控制系统中引入了电流调节部分,实现了系统的动态性能可调节控制。
2 系统特征分析
2.1 系统整体性能分析
电流可调直流电动机双闭环速度控制系统由直流电动机连杆组成;动力传动链;速度和电流检测链接;电流,速度控制链接在一起,如图1所示。
为了实现速度和电流负反馈的功能,分别建立了速度调节器Wasr 和电流调节器Wacr 的系统。Wasr 存在饱和和不饱和状态,因此不能简单地用线性控制理论进行分析。
图1. DLDMCS的动态结构图
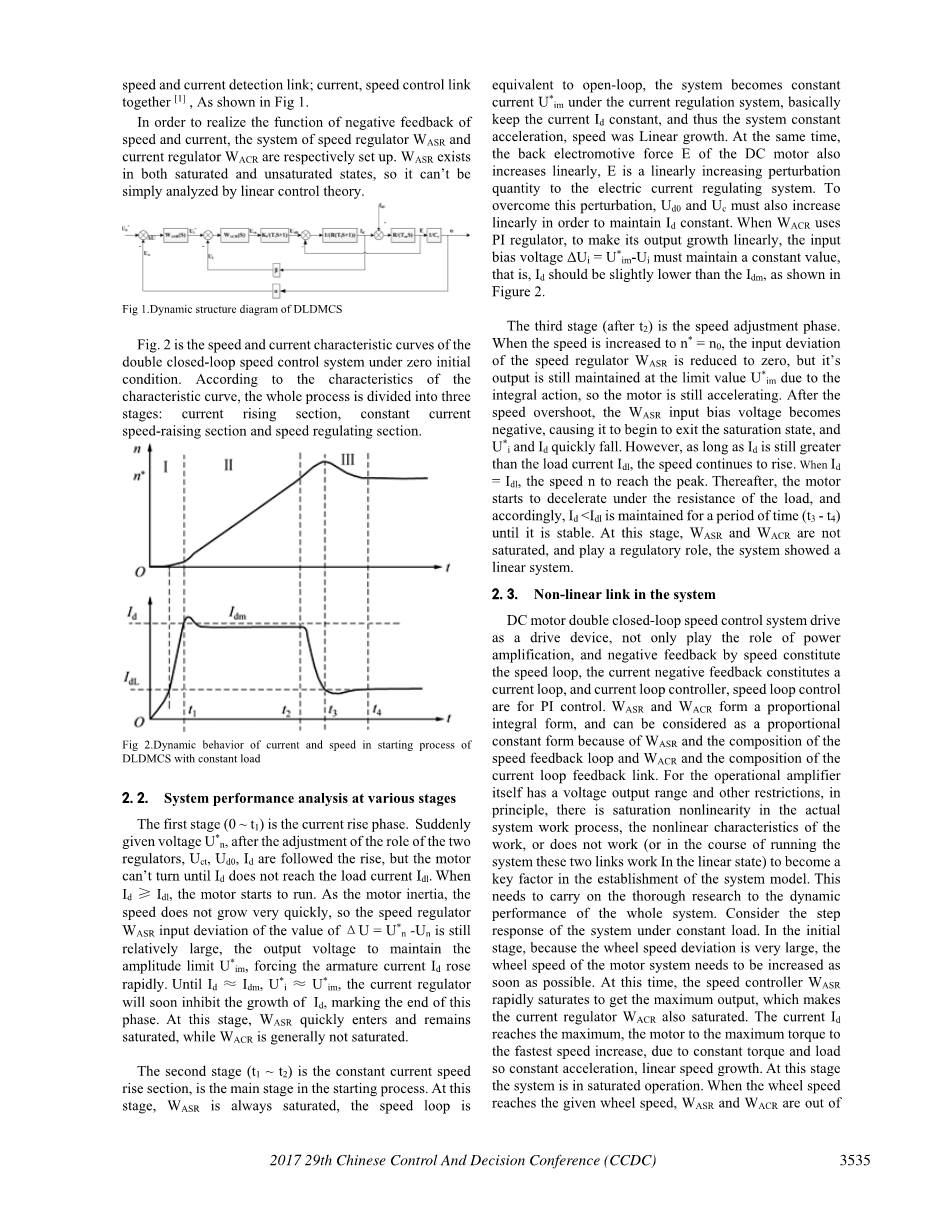
图2是双初始条件下双闭环速度控制系统的速度和电流特性曲线。根据特性曲线的特点,整个过程分为三个阶段:电流上升部分,恒流速度上升部分和速度调节部分。
图2.恒定负载DLDMCS启动过程中电流和速度的动态特性
2.2 各阶段的系统性能分析
第一阶段(0~t1)是当前的上升阶段。突然给出电压U*n,调整好两个调节器的作用后,Uct,Ud0,Id 跟着上升,但电机不能转直到Id 没有达到负载电流Id。当Id 大于等于Id时,电机开始运转。由于电机惯性,速度不会很快增长,所以调速器Wasr 输入偏差值U = U*n -Un 仍然比较大,输出电压保持不变限幅U*im,迫使电枢电流Id 迅速上升。直到Id约等于Idm,U*i约等于U*im,电流调节器将很快抑制Id的生长,标志着这一阶段的结束。在此阶段,Wasr 快速进入并保持饱和,而Wacr 通常不饱和。
第二阶段(t1 ~t2)是恒流速度上升部分,是起动过程中的主要阶段。在这个阶段,Wasr 总是饱和,速度环是相当于开环,系统在电流调节系统下变为恒流U*im,基本保持电流Id 恒定,从而系统恒定加速,速度呈线性增长。同时,直流电动机的反电动势E也线性增加,E是对电流调节系统的线性增加的扰动量。为了克服这种扰动,Ud0 和Uc 也必须线性增加以保持Id 恒定。当Wacr 使用PI调节器时,为了使其输出线性增长,输入偏置电压 偏差值Ui = U*im-Ui 必须保持恒定值,即Id 应该是略低于Idm,如图2所示。
第三阶段(在t2之后)是速度调节阶段。当速度增加到n*= n0时,速度调节器Wasr 的输入偏差减小到零,但它的输出仍然保持在极限值U*im,因为积分作用,所以电机仍在加速。在速度过冲之后,Wasr 输入偏置电压变为负,导致其开始退出饱和状态,并且U*i和Id 快速下降。但是,只要Id 仍然大于负载电流Id,速度就会继续上升。当Id= Idl,速度n达到峰值。此后,电动机在负载电阻下开始减速,并且因此,Id lt;Idl 维持一段时间(t3 -t4)直至其稳定。在这个阶段,Wasr 和Wacr 不饱和,并发挥调节作用,系统显示线性系统。
2.3 系统中的非线性链接
直流电机双闭环速度控制系统驱动器作为驱动装置,不仅起到功率放大的作用,而且通过速度负反馈构成速度环,电流负反馈构成电流环,电流环控制器,速度环控制用于PI控制。Wasr 和Wacr 形成比例积分形式,由于Wasr 和速度反馈回路的组成以及Wacr 和电流回路的组成,可以认为是比例常数形式反馈链接。对于运算放大器本身具有电压输出范围等限制,原则上在实际系统工作过程中存在饱和非线性,工作的非线性特性,或者不起作用(或者在运行系统这两个过程中)链接工作在线性状态下)成为建立系统模型的关键因素。这需要对整个系统的动态性能进行深入研究。考虑系统在恒定负载下的阶跃响应。在初始阶段,由于车轮速度偏差非常大,因此需要尽快提高电机系统的车轮速度。此时,速度控制器Wasr 迅速饱和以获得最大输出,这使得电流调节器Wacr 也饱和。电流Id 达到最大值时,电机以最大转矩以最快的速度增加,由于恒转矩和负载所以恒定加速,线速度增长。在此阶段,系统处于饱和运行状态。当车轮速度达到给定的车轮速度时,Wasr 和Wacr 不在饱和时,系统进入非饱和调节状态,应注意系统饱和的设计不能超过上限(即运放电源电压),因此积分没有过饱和部分问题,系统可以在饱和状态下快速退出饱和状态,极大地有利于双环调节性能。
从以上分析可以看出,速度调节过程在很大程度上受到速度环饱和的上限的影响。速度环的输出是电流环输入,电流环输出最终决定了电机系统的输出转矩,因此,有效控制电流,特别是电流动态控制可以实现电机转速控制的动态控制处理。
3 系统动态性能调整控制方法
3.1 速度检测方法
根据脉冲计数来测量以下三种方法的速度:(1)在规定的时间内测量产生的脉冲数,以获得测量的速度,称为M法的速度;(2)测量两个相邻脉冲的时间(3)同时测量脉冲发生器在此期间产生的检测时间和脉冲数,以测量速度,称为M / T速度方法。在上述三种方法中,M法适用于高速测量,可以获得更高的分辨率;T法适用于测量低速,然后可以获得更高的分辨率;和M / T法则高速低速适用于测量。M / T方式工作,T0定时器控制采样时间;在每个采样周期内,分别用M1计数器记录编码器输出脉冲;M2计数器记录时钟脉冲。M / T方法的速度测量波形如图3所示。
图3 m/t测量速度波形
检测精度:M / T方法在低速时倾向于T方法,高速部分的M / T方法对应于T方法的M1时间平均,在这M1倍中,最多产生高频时钟脉冲的误差。因此,M / T速度测量范围很广,速度高,精度高。由于M / T计数M1和M2的值随速度,高速变化,相当于M方法的速度,最低速度,M1 = 1,自动进入T方式速度。因此M / T方法可应用于速度范围明显大于前两个。是一种广泛使用的速度测量方法。
综上所述,在实际系统中,我们使用M / T方法来收集速度信息。主要步骤如下:A,B两个脉冲进入DSP2812 QEP电路和CAP端口,利用QEP电路检测M1值,利用CAP口记录M2值,最后通过上述算法定期更新速度ntilde;。在软件算法中使用三个定时器T0,T2和T4。32位CPU定时器T0用作采样时间T的缩放。在实际伺服系统中,考虑到速度环快速响应的需要,取T = 5ms,即T0每5ms产生一个周期性中断用于速度采样的CAP端口。定时器T2采用定向上下计数模式,正交编码脉冲电路产生4倍频率信号作为时钟源,因此A,B两个信号的计数值经过4倍脉冲数后(即m1)。电机正向T2增加计数,反向倒计数。定时器T4用作测量时间Td的参考,即,作为CAP4和CAP5的时基,并且其计数值是m2。T4使用连续递增计数,CAP4和CAP5用于在固定采样时间T结束后捕获第一个反馈脉冲,并将相应的T4计数值保存在CAP4FIFO或CAP5FIFO堆栈中。
3.2 动态性能控制的推导
当速度环Wasr 和电流环Wacr 未饱和时,系统可直接应用线性分析;在速度环Wasr 饱和,速度环输出常数U*im,速度环输出上的速度反馈可以忽略,不考虑负载变化,即忽略负载电流变化,我们可以近似将双闭环简化为单闭环分析,如图4所示。
图4. DLM的简化图
式(1)和(2)可以从上图得出。
Ui =beta; Id (1)
e=U*im-Ui(2)
其中Id 是检测到的电机电枢电流,ȕ是电流环反馈系数,e是电流环输入U*im与电流反馈值Ui之间的差值。
当e趋向于0时,即恒流加速阶段
Ui asymp;U*im(3)
(3)进入(1),(2)解决方案可用:
Id=U*im/beta;(4)
公式(4)是电流输出调整公式。从公式(4)可以看出:当速度环输出饱和幅度U*im恒定时,加速电流Id 可以通过改变反馈来改变系数beta;,使电机可以在所需的加速电流下加速。
根据上述推导,反馈系数ȕ由可调参数代替,以便将输出电流Id控制在所需电流I*的值,最终达到控制动态性能的目的。直流电动机双闭环调速系统如图5所示。
图5 介绍当前的动态控制调整链接系统简化了结构图
其中lambda;是电压极限值U*im,I*是给定的期望电流。
通过上述推导,当电流调节回路达到稳定状态时,可以根据控制需要给出输出电流Idasymp;I *和预期电流I*,以便达到控制直流电动机双闭环速度控制系统动态性能的目的。
4 物理实验平台
由于存在各种形式的非线性链接,因此有必要针对特定问题分析实际系统的非线性链接的形式。为了验证所提方法的可行性,实验平台采用MAXON RE36直流电机,功率放大器,HEDL5500编码器和电流检测模块构成电机驱动系统。它是一个具有电流,速度双闭环驱动的系统。硬件结构和系统物理图分别如图6所示。
图6实验平台
在没有电流调节环节的情况下,电机速度给出不同的响应曲线,如图7所示。
图7 无电流限制的电机速度响应曲线
在添加电流控制链路之后,在给定1500rpm和2000rpm的实际速度曲线的情况下,分别将所需电流控制在2A和1.5A,如图8所示。
图8 带电流限制的电机速度响应曲线
通过比较上述实验数据7和8,可以看出,当没有给出当前输出上限时,给出不同的目标转数。在恒流加速阶段,电机以相同的加速度近似加速到目标,这意味着动态性能的过程不受控制;在调整电流值后,可以在恒流加速阶段控制直流电机的加速度,从而调整电机加速过程的动态性能。
5 结论
本文通过对系统特性的分析,介绍了电流调节环节,实现了直流闭环双回路调速系统的动态性能控制。通过改变电流回路反馈系数可以有效地控制电动机的加速度,实现电动机的加速控制更加灵活。实验结果表明,调整电流值后,可以控制电流值在恒流加速阶段加速直流电机,然后直流电机加速可以调节MAXON直流电机双闭环调速实验平台中所需的电流值。从而达到调整电动机加速过程动态性能的目的。同时,该方法也可用于解决多电机协调控制的问题。
引用
- 陈博士电驱动自动控制系统[M]。北京:机械工业出版社,1997。
- 肖有文,夏长亮,史廷娜,陈伟四开关三相无刷直流电动机的两种有源矢量调制电流控制策略[J]。中国电机工程学报,2014年,12:1897-1904。
- 魏海峰李平平刘国海贾红平基于双电流调节器的无刷直流电动机换向转矩脉动抑制[J]。江苏大学学报(自然科学版),2010,06:691-694。
- 王希莲,徐振良。基于PI参数自适应的开关磁阻电机速度控制研究[J]。中国电机工程学报,2015,16:4215-4223。
- 李振国,王江浩,高雪飞,方一鸣无刷直流电动机转矩脉动抑制系统的组合电流控制[J]。中国电机工程学报,2015,21:5592-5599。
- 薛晓明,陈虹无刷直流电动机开路电流的研究[J]。电工技术,2011,04:64-7。
-
赵中原,李
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[440829],资料为PDF文档或Word文档,PDF文档可免费转换为Word

