
英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
用于城市轨道交通的线性感应电机连续行为和离散时间组合控制
李健强 李文龙 李根强 钟明
窗体顶端
深圳大学计算机科学与软件工程学院,深圳518060,中国
窗体底端
窗体顶端
窗体底端
窗体顶端
线性感应电动机(LIM)由于其机械结构简单,正在逐步应用于城市轨道交通以及低速和高速运行的可行性。 直接转矩控制(DTC)是一种经典的控制方案
容易扩展到LIM。 然而,由于低速运行时的高推力波动和较差的动态性能,DTC的控制性能不能令人满意。 本文提出了一种明确的模型预测控制结合DTC方案。 首先,提出和离散LIM模型。 然后,讨论LIM驱动及其工作原理。第三,描述了控制器设计,包括控制变量和目标函数。 最后,两者的模拟和该实验用于验证所提出的控制算法。
关键字:窗体顶端
关键词:连续行为,离散时间,线性感应电机(LIM),模型预测控制(MPC),城市轨道交通
窗体底端
1 引言
窗体顶端
近年来城市轨道交通的线性驱动器吸引了更多的重视[1]-[3]。 与旋转驱动器比较,线性驱动器有许多明显的优势:动态性能快,可靠性提高,声噪音低,效率高,维护少等。线性感应电机(LIM)由于消除了不必要的机械机制造成本,适用于旋转到线性运动转换,线性同步电机和线性永磁电动机中。特别是LIM具有结构简单,低成本,高可靠性的特点,使其更适合。
窗体顶端
LIM的控制策略可以称为旋转对应,即可变电压变量频率(VVVF)控制,直接转矩控制(DTC)[4],和面向场的控制(FOC)[5]。 VVVF属于a标量控制方法,DTC和FOC是矢量控制方法。 在动态性能方面,矢量控制优于标量控制。 但是,复杂的FOC的控制算法存在一些缺点。VVVF的控制复杂度不高,其性能也有限。 直接控制定子磁通的DTC联动和扭矩可以提供可比性能到FOC,实现更快的扭矩响应灵活控制。因为用于优化的在线计算降低了实时性表现,提出了一个明确的MPC(EMPC)执行离线优化计算并减少控制复杂性[7]。
窗体顶端
本文将应用EMPC来控制LIM城市轨道交通。基于分段仿射(PWA)模型
和混合逻辑动力学(MLD)模型,数学线性建模是线性的,这是一种混合系统,包括连续和离散行为变量,通过模拟和实验评估执行以验证所提出的方法。
2 数学建模
2.1 线性感应电机建模
窗体顶端
LIM可以视为简单的切割和展开感应电动机。 所以操作原则是一样的。三阶段的动态模型和Y连接的LIM可以表示如下[8]:
开发的推力被描述为:
窗体顶端
其中Rs和Rr是定子电阻和移动器
电阻分别为sigma;为漏磁系数,
Ls,Lr和Lm是定子电感,动子电感,
和磁化电感分别为Tr窗体顶端
窗体顶端
其中Rs和Rr是定子电阻和移动器电阻分别为sigma;为漏磁系数,Ls,Lr和Lm是定子电感,动子电感,和磁化电感分别为Tr移动时间常数,ids和iqs是d轴和q轴定子电流分别为tau;为定子极间距,vs为同步速度,v是移动速度,lambda;dr和lambda;qr是d轴和q轴移动通量分别为Np的极对,Vds和Vqs是d轴和q轴定子电压。
非线性微分的前欧拉离散化采用等式建立离散时间模型LIM。 由于移动速度远远大于采样速度间隔和预测间隔,动子速度和d轴动子通量联动可以被认为是恒定的。 因此,(1)和(2)可以重写为
2.2 直线感应电机驱动
窗体顶端
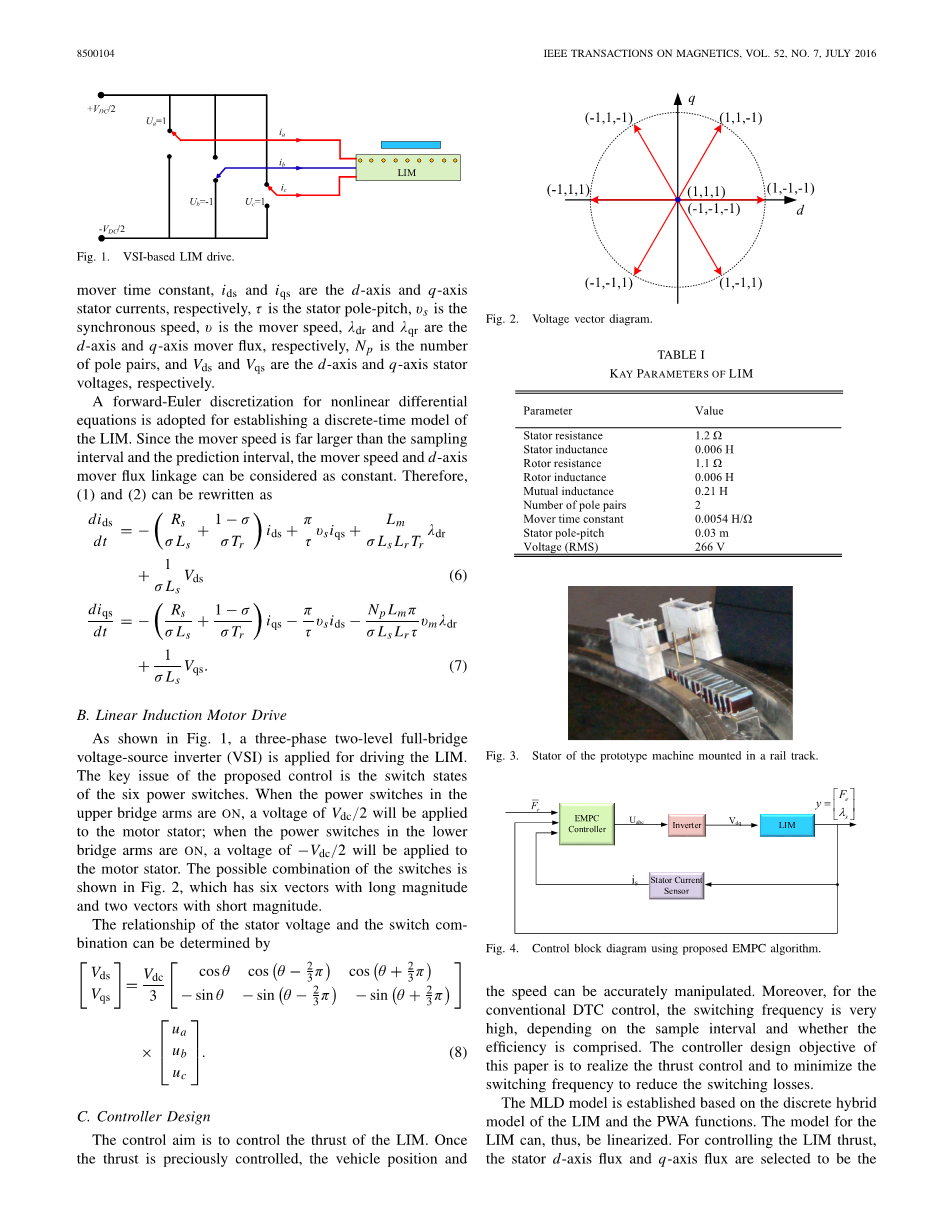
如图1所示是一个三相二级全桥电压源逆变器(VSI)用于驱动LIM。控制的关键问题是开关状态的六个电源开关。 当电源开关在上桥臂为ON,将施加Vdc / 2的电压到电机定子; 当电源切换到较低时桥臂为ON,将施加-Vdc / 2的电压电机定子。 开关的可能组合如图2所示,有六个量纲较长的矢量和两个量纲较短的矢量。
窗体底端
窗体底端
图1 基于VSI的LIM驱动
图2 电压矢量图
窗体顶端
定子电压与开关组合的关系可以由一下关系式决定
2.3 控制器设计
窗体顶端
控制目的是控制LIM的推力。 一旦推力被控制,车辆位置和窗体顶端
窗体顶端
控制目的是控制LIM的推力。 一旦推力被精确控制,车辆位置和速度可以精确地操纵。而且,对于常规DTC控制,开关频率非常高。取决于采样间隔和是否包括效率控制器。目标本文旨在实现推力控制和最小化开关频率降低开关损耗。
MLD模型是基于离散混合型建立的LIM和PWA功能的模型。 因此,LIM可以被线性化。 为了控制LIM推力,选择定子d轴磁通和q轴磁通量状态变量
控制系统的输出为
窗体顶端
所提出的控制系统的输入电压为三相电枢绕组
控制系统的目标功能有两个目标:最小化实际推力与推力之间的误差参考并降低VSI的开关频率。 它可以表示为
窗体顶端
基于(12),EMPC可以应用于控制LIM使用二次规划[7]。 在(10)对开关频率施加压力以确保切换动作的发生尽可能晚。
3 性能验证
窗体顶端
为了验证所提出的控制算法,两者都是基于EMPC进行模拟和实验。表1显示了应用程序的LIM原型在城市轨道交通的关键数据。 原型机也如图3所示给出了。原型的控制框图使用所提出的EMPC的机器如图4所示,控制系统由EMPC控制器,变频器,原型机和定子电流传感器组成。 输入是推力参考Fe,定子电流和定子通量lambda;s。
表1 LIM的主要参数
图3 原型机的定子安装在轨道上
图4 使用提出的EMPC算法的控制框图
3.1 模拟结果
窗体顶端
为了验证推力跟踪性能,斜坡响应应用于LIM。 在低速范围内,推力参考值为80N,当速度固定时在1m / s时,推力基准等于负载力20N。推力的输出限制在(0,85)内定子磁通链接限制在(0.75,0.85)内以避免定子铁芯的饱和度。 响应波形如图5所示。 可以发现目前的波纹在低速区域是小的,这有助于稳定
推力低波纹。 通过使用拟议的EMPC,低速运转的推力波动被抑制。 因此,具有稳定的推力,LIM的速度线性增加 另外,控制定子磁通在0.075-0.085 Wb范围内。 因此,动态LIM的性能提高,而饱和度在防止电机内芯。
窗体底端
窗体底端
图5 使用EMPC进行斜坡响应。 (a)电流波形。 (b)速度
波形 (c)推力波形。 (d)定子磁通波形
3.2 实验结果
窗体顶端
进行实验以评估动态表现在低速范围内高波纹通常发生。 图6 和图7显示了稳态运行的LIM在0.15和0.35 m / s的空载条件下,目前两种情况的振幅是
0.8和1.2 A。 可以发现当前的非常接近正弦曲线,这与模拟类似结果。 总谐波失真(THD)两种情况分别为8.2%和6.3%。 为了验证负载性能提出的方法,其当前及其频谱测量LIM运行在0.35m / s,如图8所示目前的幅度和THD分别为2.5A和8.6%分别。 这意味着低速的推力波动无负载和负载都可以减轻区域的损耗条件,这证实了动态性能可以要改进 也可以从谱图中找到切换转换最小化,整体效率可以改进。
窗体底端
窗体底端
图6 LIM运行在0.15 m / s (a)电流波形 (b)当前频谱
窗体顶端
图7 LIM运行在0.35 m / s (a)电流波形(b)当前频谱
窗体底端
窗体底端
图8 窗体顶端
图8 LIM在0.35 m / s的负载下运行。 (a)电流波形(b)当前频谱。
4 结论
窗体顶端
在本文中,为城市轨道交通应用提出了一种基于EMPC的线性电机驱动器。 通过使用EMPC,LIM的连续行为及其离散时间变量可以与PW组合在一起的MLD模型。 通过与传统DTC的结合感应电机,其动态性能,特别是低速运行区域有所改善。 两者都是模拟的并提出实验结果以验证提出的控制算法。
窗体底端
参考文献
[1] S.-B. Yoon, J. Hur, and D.-S. Hyun, “A method of optimal design of
single-sided linear induction motor for transit,” IEEE Trans. Magn.,
vol. 33, no. 5, pp. 4215–4217, Sep. 1997.
[2] W. Xu, J. G. Zhu, Y. C. Zhang, Y. H. Li, Y. Wang, and Y. G. Guo,
“An improved equivalent circuit model of a single-sided linear induction
motor,” IEEE Trans. Veh. Technol., vol. 59, no. 5, pp. 2277–2289,Jun. 2010.
[3] R. Cao et al., “Modeling of a complementary and modular linearflux-switching permanent magnet motor for urban rail transit applications,”IEEE Trans. Energy Convers., vol. 27, no. 2, pp. 489–497,
Jun. 2012.
[4] F. Khoucha, M. S. Lagoun, A. Kheloui, and M. El Hachemi Benbouzid,
“A comparison of symmetrical and asymmetrical three-phase H-bridge
multilevel inverter for DTC induction motor drives,” IEEE Trans. Energy
Convers., vol. 26, no. 1, pp. 64–72, Mar. 2011.
[5] E. Bim, “Fuzzy optimization for rotor constant identification of an
indirect FOC induction motor drive,” IEEE Trans. Ind. Electron., vol. 48,no. 6, pp. 1293–1295, Dec. 2001.
[6] J. Thomas and A. Hansson, “Speed tracking of a linear induction motorenumerative nonlinear model predictive control,” IEEE Trans. Control Syst. Technol., vol. 21, no. 5, pp. 1956–1962, Sep. 2013.
[7] P. Toslash;ndel, T. A. Johansen, and A. Bemporad, “An algorithm for
multi-parametric quadratic programming and explicit MPC solutions,”
Automatica, vol. 39, pp. 489–497, Mar. 2003.
[8] F.-J. Lin, P.-H. Shen, and S.-P. Hsu, “Adaptive backstepping sliding
mode control for linear induction motor drive,” IEE Proc.-Electr. Power
Appl., vol. 149, no. 3, pp. 184–194, May 2002.
窗体顶端
用于半磁悬浮轨道车辆的横向磁通线性开关磁阻电机
摘要:窗体顶端
摘要:在本文中主要呈现了基于磁阻电机(TFLSRM)的城市轨道交通车辆横向通量线性切换牵引系统,对TFLSRM结构和操作原理进行了分析。定义了推力和正常力量的数学模型,并被运用于定子和转子相等和不相等极。 基于已知开关磁阻电机的直接转矩控制原理,提出了一种同时控制TFLSRM牵引力和正常力的控制方法,通过仿真验证开发的控制方法的有效性。
窗体底端
窗体顶端
-
引言<!--
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[136873],资料为PDF文档或Word文档,PDF文档可免费转换为Word

