
英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
使用模糊逻辑控制器的直流电机速度控制
Yasser Ali Almatheel,Ahmed Abdelrahman,Karary University, Khartoum, Sudan
摘要:本论文采用PID控制和模糊控制两种方法,研究对直流电机的速度控制。PID控制器的设计需要建立直流电机系统的数学模型,而模糊逻辑控制器的设计则需要基于以规则为基础的实际经验。
模糊逻辑控制器(FLC)的设计需要以很多设计决策作为基础,比如设计规则和模糊化。模糊逻辑控制器(FLC)有两个输入,其中一个输入是速度误差,另外一个输入是速度误差的变化量。模糊逻辑控制器有四十九条模糊规则。四十九条模糊规则中,主要采用重心方法去模糊化。模糊控制器采用的是mamdani系统,该系统在后续部分采用模糊集。PID控制器主要采用试错法选择参数。PID控制器和模糊逻辑控制器(FLC)的设计都采用MATLAB/SIMULINK封装程序来模拟直流电机的速度控制仿真,我们发现模糊逻辑控制器(FLC)控制器与PID控制器相比,在设计上更加困难,但是模糊逻辑控制器(FLC)更适合对具有非线性特性的直流电机进行速度控制。仿真结果表明,模糊逻辑具有最小的瞬态和稳态参数,因此模糊逻辑控制器(FLC)比PID控制器更加高效。
关键词:直流电机,PID,模糊逻辑控制器,mamdani,SIMULINK
1绪论
“在我们身边的所有的机械运动,几乎都是依靠电机来完成的。电机是转换能量的一种方式,它可以将电能转化为机械能。电机可以为我们日常生活中用到的上百种设备供电。电机大致被分为两种不同的类型:DC(直流电机)和AC(交流电机)。这两种类型的电机又被细分为很多种类的电机,每个种类都有特殊的性能来适用于特殊的用途。在大多数场合中,不管什么类型的电机,都包括定子(静止场)和转子(旋转场或电枢),并通过其相互作用而操作磁通和电流以产生旋转速度和扭矩。”[1]
“电机控制器用于调节电机系统的行为,使电机系统在一段时间内工作在期望的方式。模糊逻辑控制器就是这些电机控制器之一。模糊逻辑控制器(FLC)在非线性去模糊化方法使用时,从解析方面可以等效为一种非线性控制器。还有,在常规控制器和模糊逻辑控制以FLC和模糊补偿器的形式进行比较时,结果显示表明:模糊逻辑控制器可以有效减少非线性对直流电机的影响、提高电机控制器的性能。”[3]
“对于模糊控制器而言,模糊逻辑工具箱在各方面都令人印象深刻。因此,模糊逻辑对智能系统而言是一个有效的概念和设计。模糊逻辑工具箱不仅易于掌握、使用方便,而且提供对模糊逻辑的最新介绍、拥有读者友好的阅读界面、可以在生产和生活中被广泛应用。”[4]
PID控制器(比例-积分-微分控制器),由比例单元 P、积分单元 I 和微分单元 D 组成。通过Kp,Ki和Kd三个参数的设定。PID控制器主要适用于基本线性和动态特性不随时间变化的系统。PID 控制器是一个在工业控制应用中常见的反馈回路部件。这个控制器把收集到的数据和一个参考值进行比较,然后把这个差别用于计算新的输入值,这个新的输入值的目的是可以让系统的数据达到或者保持在参考值。和其他简单的控制运算不同,PID控制器可以根据历史数据和差别的出现率来调整输入值,这样可以使系统更加准确,更加稳定。可以通过数学的方法证明,在其他控制方法导致系统有稳定误差或过程反复的情况下,一个PID反馈回路却可以保持系统的稳定。
2相关工作说明
我们可以通过以下几种不同的方法实现对电机速度的控制:
2.1通过电枢电压的变化实现电机速度的控制
“在单独激励的电机中,可以改变施加到电机的电压的同时保持场的恒定。不同的电枢电压拥有不同的截距(即不同的空载速度),并产生一系列平行(即相同斜率)机械特性c / s。为了获得可变的直流电压,最简单的方法是使用分压器,但是这种方法是不切实际和不经济的,这种方法只在实验测试的时候使用。在现代的实际应用中,用于电枢的可变DC电压通常从固态可控整流器获得,其中场由不受控整流器馈送。另一种用于获得平滑电压控制的有效方法是使用WardLeonard系统。直流电动机通过由一些原动机驱动的直流发电机馈电(例如交流电动机或柴油发动机)。通过改变激励器的场激励,使得电动机的电枢电压发生变化(并且甚至可以被保留)。电机磁场由励磁机(小型直流发电机)或定电压的整流器供电。 Ward-Leonard系统通常比固态驱动器更昂贵,但是具有补偿某些特定应用的优点。
2.2通过磁场的变化实现对电机速度的控制
如果磁场电路电阻增加,则磁场电流和主磁场强度将减小,而速度将增加。场电阻越高,则截距越高、斜率越大(即c / s变得越软)。磁通量不能因为速度变得很大而迅速减小,这样可能会损伤电机。另外,如果主磁场变得太弱,则退磁效应电枢反应变得突出(相对较大),这可能导致系统产生不稳定性。”[11]
2.3通过比例积分微分控制器(PID控制器)实现对电机速度的控制
PID控制器是嵌入式系统的微型控制部分,它可以操作世界上的大多数控制系统。PID控制器可以被应用于广泛的设计问题,如电机驱动控制、汽车速度调节、飞行控制和仪表检测等。但是调整PID控制器的参数非常困难,同时PID控制器的鲁棒性非常差,难以在实际生产的现场条件下实现最佳调节状态。需要根据实际情况对PID的参数进行调整。”[2]
3.解决方案
直流电机的非线性特性:如直流电机的饱和以及粘性摩擦这两种非线性特性,可能降低常规控制器的性能。此外,由于传统控制器固定结构和固定参数,发生这些问题时,预计传统控制器的协调和优化调节会有一定的困难。所以,我们采用模糊控制器(FLC)克服这些限制,模糊逻辑控制器并不像常规逻辑控制器控制系统。模糊逻辑控制器(FLC)可以模拟不准确或者不精确的模型。模糊逻辑控制方法对非线性的系统提供了一种更快、更可靠的解决方案,因此,模糊逻辑控制是一种具有明显优势的常规技术。实际上,模糊逻辑主要用于处理传统控制方法不能解决的高级控制问题。模糊逻辑控制器有助于获得输出,它可以在短时间内获得期望输出,具有最小过冲、小误差、最小建立时间以及快速上升时间等优点,这些特点在工业应用中至关重要。
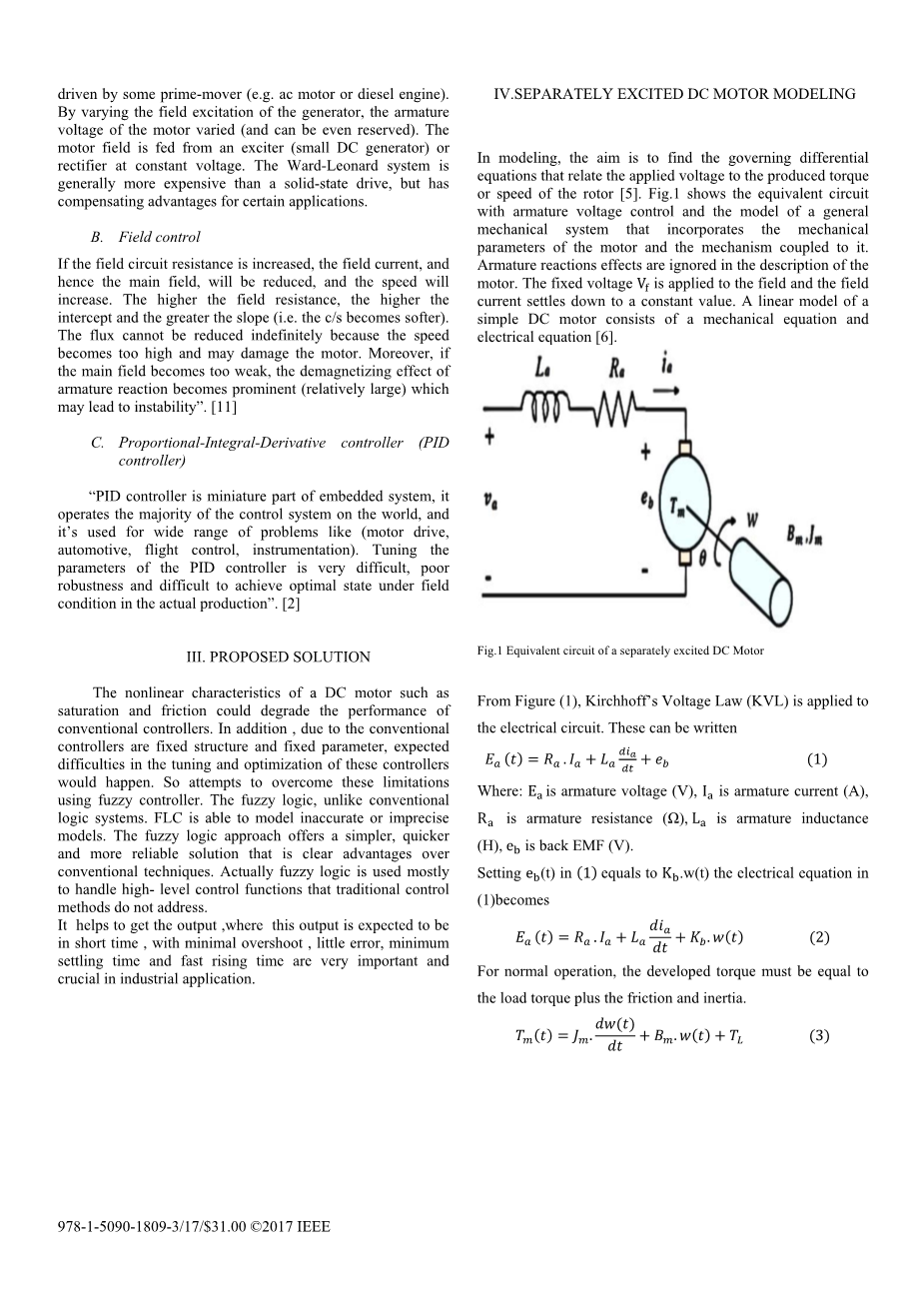
建立模型的目的是找到施加的电压与所产生的转子的转矩或者速度相关的方程之间的管理上的差异[5]。图1示出了具有电枢电压控制的等效电路,包括电机的机械参数和与其耦合的机构的一般机械系统的模型。在对电机的描述中忽略了电枢反应效应。将固定电压Vr施加到场,并且场电流稳定到恒定值。简单的直流电机的线性模型由机械方程和电方程组成[6]。
图1 单独激励的直流电动机的等效电路图
根据图1,,将基尔霍夫电压定律(KVL)运用到整个电路回路中,可以得到式(1):
式(1)中:Ea是指电枢电压(V),Ia是指电枢电流(A),Ra是指电枢电阻(Omega;), La是指电枢电感(H),eb是指反电动势(V)。
使eb(t)等效为Kb.w(t),则电动势方程转化为式(2):
对于正常操作,所产生的扭矩必须等于负载扭矩加上摩擦和惯性,则得到式(3):
式(3)中:Tm是指电机转矩(Nm),Jm是指转子惯量(kg.m2),W是指角速度(rad/s),Bm是指摩擦系数(Nms/rad),TL是指负载转矩(Nm).
使Tm(t)等于KT,Ia=TL=0,得到式(4):
对式(2)和式(4)进行拉普拉斯变换,得到式(5)和式(6):
从(3-4)获得的电流方程,如式(7)所示:
然后再将(5)中进行代换,得到式(8):
因此,转子轴速度和施加的电枢电压之间的关系可以由传递函数表示,如图2所示。
图2 单独激励直流电动机
单独激励的直流电机的规格。单独激励的直流电动机使用的参数列举于表1中。
表1
直流电机使用的参数
4.模糊推理系统
“模糊推理系统(FIS)是指使用模糊逻辑来制定从给定输入到输出的映射的过程的一个系统。模糊推理系统已经成功应用于诸如自动控制、数据分类、决策分析、专家系统和计算机视觉等各个领域,目前有两种类型的模糊推理系统可以实现:Mamdani型和Sugeno型。
这两种类型的推理系统在确定输出的方式上稍有不同。Mamdani式推理需要通过积分找到二维形状的质心跨越连续变化的函数。Micheno Sugeno则建议使用单个尖峰,作为规则结果的隶属函数。一个单例,或者更确切地说是一个模糊单例,是一个具有隶属函数的模糊集合,它在话语世界的单个特定点是统一的。”[4]
“对FLC应用的要求主要出现在以下情况:
- 技术过程的描述仅以文字的形式出现,而不是以分析的形式出现;
- 不可能精确地识别过程的参数;
- 过程的描述太复杂,用简明的语言表达其描述是更合理的;
- 控制技术过程具有“模糊”特性;
- 不可能精确地定义这些条件。”[8]
模糊逻辑控制是基于语言控制策略的控制算法,模糊逻辑控制是将专家知识导出到自动控制策略中。图3给出了模糊控制系统的框图。模糊控制器由以下四个部分组成:
图3 模糊控制系统框图
设计模糊控制器的第一步,决定表示系统动态性能的哪些状态变量必须作为控制器的输入信号。模糊逻辑使用语言变量而不是数值变量。将数字变量(实数或脆性变量)转换为语言变量(模糊数)的过程称为模糊化。这是用不同类型的模糊器实现的。通常有三种类型的模糊器用于模糊化过程。这些是:
- 单形模糊器;
- 高斯模糊器;
- 梯形或三角形模糊器。
这里有两个输入(速度误差和速度误差的变化),其中速度误差具有从-4.75到4.75的范围,并且速度误差的变化是从-1.65到1.65,如图4、图5所示。高斯模糊化已经用于输入,并且三角形已经用于输出,输出是具有范围从-7到7的控制动作,如图6所示。
图4 速度误差变量
图5 速度误差变量的变化
图6 输出变量
4.1依据的规则
决策逻辑就是模拟人类决策过程,根据控制规则和语言变量定义的知识来模糊控制动作[9]。规则是“If Then”格式,并且正式地将If侧称为条件,Then侧称为结论。计算机能够执行规则并根据测量的输入误差(e)“输出速度和设定点之间的差”和误差变化,将这些作为模糊控制器的输入,并且将控制函数作为输出,来计算控制信号,这个信号就是电枢电压。在基于规则的控制器中,控制策略以或多或少的自然语言存储。对于非专业终端用户来说,规则库控制器易于理解和易于维护,并且可以使用常规技术来实现等效控制器[12]。规则如表2所示(7 * 7 = 49)。规则中使用的语言变量是:
1) LN 表示:大负
2) MN 表示:中负
3) SN 表示:小负
4) ZE 表示: 零
5) SP 表示:小正
6) MP 表示:中正
7) LP 表示:大正
表2
单独激励的直流电机速度控制的规则基础
4.2推理机
推理机是基于给定情况的事实处理规则、案例、对象或其他类型的知识和专
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[141112],资料为PDF文档或Word文档,PDF文档可免费转换为Word

