
英语原文共 16 页,剩余内容已隐藏,支付完成后下载完整资料
异步测量与控制:以电机同步为例
W.P.M.H. Heemelsa,*,R.J.A. Gorterb, A. van Zijla, P.P.J. van den Boscha,
S. Weilanda, W.H.A. Hendrixa, M.R. Vonderc
a荷兰埃因霍芬理工大学电气工程系,邮政信箱 513,5600 MB,埃因霍芬,荷兰
bTNO工业,产品开发部,邮政信箱 6235,5600 HE 埃因霍芬,荷兰
cBuhrs-Zaandam B.V.公司,邮政信箱 92,1500 EB 赞丹,荷兰
1998年6月23日收到;1999年6月24日接受
摘要
本文研究了主、从电机之间的同步问题。为了降低主从组合的成本,从电动机安装了一个分辨率很低的编码器(每转一个脉冲)。由于位置测量在时间上是异步的,因此标准控制和分析技术不适用。于是这里提出了两种方法来处理这些廉价的低分辨率编码器:混合和异步控制方案。所提出的控制器已在用于邮递机的实际工业主从系统上成功测试了。copy;1999 爱思唯尔科学版权所有。
关键词:主从系统;同步;编码器;电机控制;工业生产系统;离散事件动态系统
1.介绍
在工业制造系统中,经常会遇到这样的情况,其中几个从电动机的位置应跟随主电动机的位置。例如产品装卸机和多传送带系统。传统上,这种同步是通过一个驱动所有工具的单一机械轴来实现的。如今,这些机械轴被一个或多个“电气轴”所取代,从而获得了更多的灵活性,从这个意义上说,可以轻松添加或移除工具(“即插即用概念”)。如果是电轴, 则将小型电机分别连接到每个工具上。基于共享信号的自动控制用于同步工具。
通常,驱动电动机的角位置由编码器测量,编码器仅在电动机轴的固定位置提供脉冲。因此,电动机轴位置的信息变为可用的时间的间隔不相等。编码器通常具有很高的分辨率,通常电机轴的每转有1000至5000个单独的测量位置(脉冲)。实际上,在固定的时间间隔之后高分辨率编码器被读出,编码器的离散事件特性被忽略了。
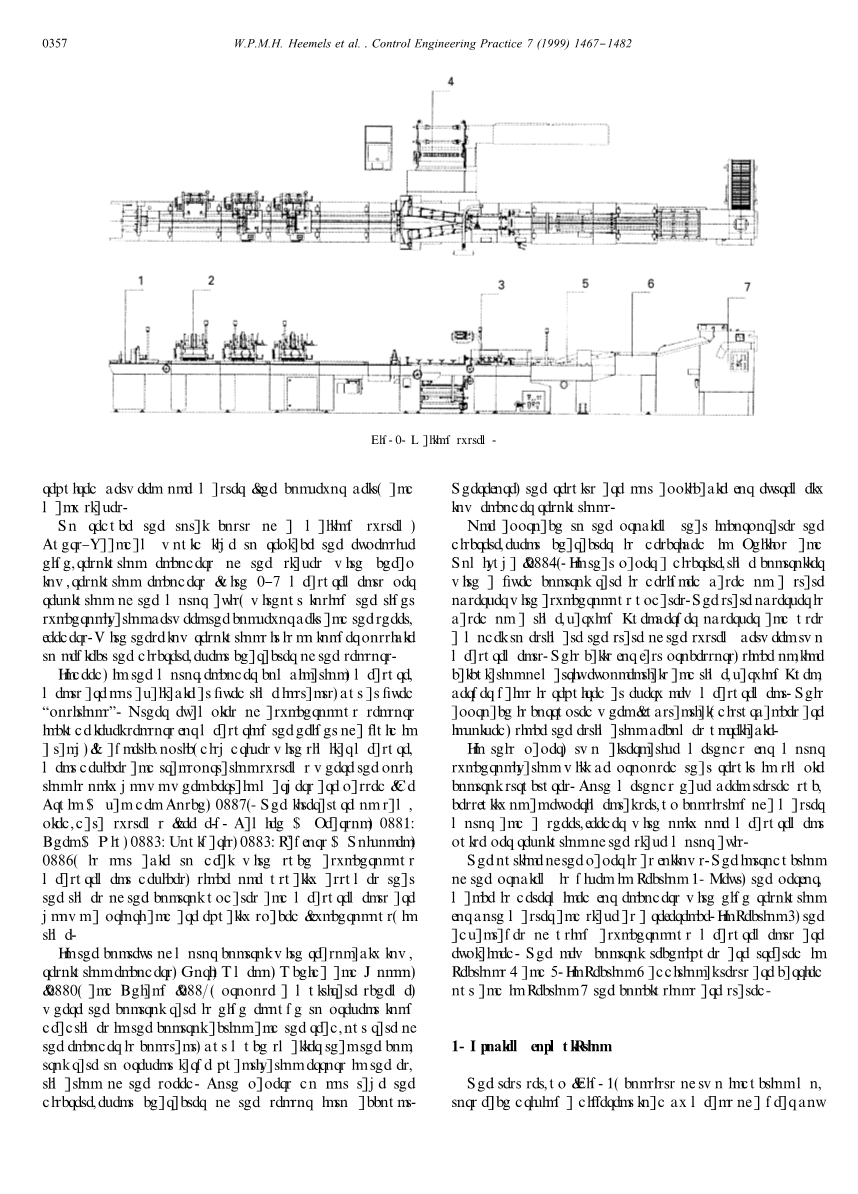
位于赞丹(荷兰)的 Buhrs-Zaandam B.V.公司制造的邮寄系统可以自动组合由几本小册子组成的邮件。一个邮寄系统如图1所示。邮寄的主要组件(例如书本或杂志)在装载机模块(图1中的1)处进入传送带(吊链)。由送纸器2组成的送纸器模块在主产品中添加了一些补充材料。送纸器基本上是从一堆纸中拿出一本小册子,放在传送带上(在这种情况下是主)。主要产品与补充剂一起形成一个包装,该包装由包装模块3包裹在塑料箔中。这个箔由卷轴支架4提供。不正确的包装在剔除模块5处被移除。最后,发布产品,然后使用标签或直接通过喷墨打印机6打印地址。之后,将产品放在堆栈7中。很明显对于这种邮寄系统在一个主机(传送带)和许多从机之间同步是需要的。
为了降低邮寄系统的总成本,Buhrs-Zaandam公司希望用廉价的低分辨率编码器(电机轴每转1-8次测量)替换从站的昂贵的高分辨率编码器,而又不会失去传送带和送纸器之间的紧密同步。有了这些低分辨率,就不再可能忽略传感器的离散事件特性。
图1 邮寄系统
实际上,在电动机/编码器组合中,测量不可能在固定时间瞬间进行,而是在固定“位置”进行。异步传感器的其他示例还有用于测量罐中液体高度的液位传感器,具有类似测量设备的(磁/光)磁盘驱动器以及只有通过某些标记时才知道位置的运输系统( De Bruin & van den Bosch ,1998 )。有关采样数据系统的文献(见Bamieh & Pearson ,1992 ; Chen & Qiu ,1994 ; Voulgaris,1994; Sagfors & Toivonen,1997)无法处理这种异步测量设备,因为人们通常会假设控制更新和测量的时间是先验的,并且在时间上是等间隔的(同步的)。
在采用合理的低分辨率编码器进行电机控制的情况下,Hori,Umeno,Uchida 和 Konno(1991)和Chiang(1990)提出了一种多速率方案,该方案的控制速率足够高,可以防止在控制动作中出现较长的停滞时间并且编码器的读出速率是恒定的,但是比控制速率小得多,以防止在速度估计中出现较大的量化误差。这两篇论文都没有考虑传感器的离散事件特性。因此,该结果不适用于极低的编码器分辨率。
飞利浦和 Tomizuka(1995)描述了一种解决包含离散事件特性问题的方法。在那篇论文中,基于具有异步更新的状态观测器而设计了一个有固定的控制速率的离散时间控制器。状态观测器基于时变的龙伯格观测器,并使用模型来估计系统在两次测量之间的状态。这就需要快速处理器,因为在每次新的测量中都需要在线计算矩阵指数和时变的龙伯格增益。当涉及(大量)干扰时,由于估算变得不可靠,因此这种方法会行不通。
在本文中,将提出两种不同的电动机同步方法, 从而实现简单的控制结构。这两种方法都成功地在一个实验装置上进行了测试,该装置由一个主电机和一个从电机轴每转只有一个测量脉冲的送纸器组成。
论文大纲如下。问题的介绍在第2节中给出。接下来,确定具有高分辨率的编码器的性能,以主机和从机作为参考。在第4节中,说明了使用异步测量的优点。在第5节和第6节中讨论了新的控制技术。在第7节中进行了额外的测试,在第8节中陈述了结论。
2.问题表述
图2 测试装置
测试装置(图2)由两个感应电动机组成,每个感应电动机都通过齿轮箱驱动不同的负载(齿轮比igear等于12.5,这意味着电机轴的转动速度是负载轴的12.5倍)。一台电机是主电机(用来驱动传送带),另一个是从电机(驱动送纸器)。感应电动机由变频器供电(图2)。
作为从电机和机械系统的模型,使用了一个简单的三阶模型(Leonhard,1990)给出了公式为
(1a)
(1b)
(1c)
其中theta;s(rad)是从动电机轴的位置,omega;s(rad/s)是电动机轴的速度,T(N m)是电机产生的转矩,u(V)是施加在变频器上的电压(控制输入),d(N m)是由送纸器产生的转矩扰动。在此模型中,假定变频器为与增益Kf(rad/V s)成线性关系。感应电动机的转矩转差率曲线通过系数Kt(N m s/rad)线性化。J(kg m2 /rad)是转子加负载的惯量,B(N m s/rad)是机械阻尼。常数tau;(s)代表电动机中的电气时间常数。利用电机铭牌数据和各种测量结果,使用 Gorter(1997)的技术估算了从属电机的模型参数为Kt = 0.35 N m s/rad, Kf = 46.3 rad/V s, tau; = 0.05 s,J = 8.5times;10-3 kg m2/rad 和 B = 9.8times;10-3 N m s/rad。
从编码器通过电机轴每转N个脉冲测量theta;s(rad)。因此,仅在满足以下条件的时间t上才能精确测量theta;s
(2)
其中delta;s=(2pi;/N)(rad)。主theta;m的位置将由高分辨率编码器测量,每转等距测量1024次,得到theta;m的分辨率:2pi;/1024。在图 2 中,theta;m=theta;mm ,theta;s=theta;sm。此外,theta;ml(rad)和theta;sl(rad)分别表示主从负载轴的角位置。
控制器必须保持主从负载轴之间的误差控制在-0.1rad到0.1rad 之间。根据齿轮传动比,主从电机轴位置之间允许的最大误差为1.25rad:
(3)
不考虑干扰和执行机构的限制。
系统的干扰主要是由于电动机负载的变化所引起的。在测试装置中,恒定负载连接到主电机上。这符合邮寄系统的正常运行条件,因为传送带的负载几乎是恒定的。从电机驱动所谓的送纸器。送纸器由一个大的金属滚筒组成,由电机带动旋转。在该滚筒上有一组抓取器,用于抓住小册子,它们是有联系的。在邮寄系统中,小册子通过金属滚筒运输到传送带(吊链),在那儿小册子被放出。抓具通过一组弹簧压在滚筒上。这些弹簧通过附在鼓上的凸轮轴进行拉伸和释放。
各种弹簧的挤压和释放产生了变化的负载转矩,已将其建模一种扰动。由于所有操作都是随着滚筒的旋转而循环的,因此施加在电动机上的转矩扰动取决于负载轴(滚筒)的位置theta;sl(rad)。在图3中给出了作为负载轴位置theta;sl的函数的测量转矩。为了得到施加在电机轴上的转矩扰动d,图3中的变动转矩必须除以齿轮比igear=12.5,并且必须加上恒定的库仑摩擦力矩。
执行器的限制包括饱和度和速率限制器。输入电压u限制在0到10V的范围内。此外,为了限制电动机中的转差率(定子频率与机械频率之间的差异),u的最大变化速率为 5 V/s,即对所有t都满足。
3.常规同步控制
3.1.前馈控制部分
作为解决同步问题(3)的第一步,主变频器到从变频器的前馈信号将被应用(见图 2)。在理想的情况下,当两个电机相同并驱动相同的负载时,不需要额外的控制动作来保持电机同步运行(即对于所有tge;0,有theta;s(t)=theta;m(t))。在非理想情况下,theta;s将不等于theta;m,并且需要反馈控制器来保持位置误差有界,如(3)。由于前馈部分不依赖于从电机或主电机位置,因此在反馈控制器的所有设计过程中,它将保持不变。
图3 给料机转矩(变化部分)与负载轴位置theta;sl的函 图4 受控(实线)和非受控(虚线)的扰动抑制
数关系 伯德图
3.2.反馈控制部分
作为一个可实现的性能的指标,具有固定高采样率的标准PI控制器是在高分辨率编码器(每转1024个脉冲)的基础上为从电机和主电机设计的。PI控制器是使用标准的根轨迹技术设计的(参见Franklin, Powell amp; Naeni,1994)。图4是闭环扰动抑制(d对theta;s的作用)。低频时以一定的代价可以获得良好的干扰抑制能力——在10-50 rad/s的频率范围内进行放大。即使使用高阶控制器,输入端的速率限制器也会阻止抗干扰性能的改善(Van Zijl,1997)。
为了在实际系统上测试控制器,对连续时间控制器进行离散化,采样频率为2kHz (样本时间Ts = 5times;10-4),结果离散传递函数为Hc(z) = P I(z-1)-1,其中P = 0.21和I = 15times;10-4是PI控制器的比例和积分常数。在采样时间内,从机和主机的编码器都被读出并相互减去以得到位置误差。在较长的控制死区时间和测量机制导致的较大量化误差之间,采样频率的选择是要权衡的。最高的相关过程频率为20Hz,对应于(1)中的电气时间常数。采样频率为2kHz是一种合理的选择,因为它是最高相关过程频率的100倍,最大绝对量化误差为2pi;/1024 = 6.1times;10-3rad。为避免积分作用结束,已采用了 Peng,Vrancic 和Hanus在1996 年所述的调节技术。(反馈)控制器的伪码见附录。
在图5中给出了不同电机转速下主从之间的位置误差。
位置误差保持在要求的1.25 rad误差范围内。小的波动是由送纸器的位置相关干扰引起的。由于这种周期性扰动的频率与电动机速度直接相关,因此波动的频率会有所不同。因为对于扰动,前六次谐波是相关的(见 Van Zijl,1997), 所以扰动的频带范围是负载速度的1到6倍。负载速度等于从电机速度除以齿轮比igear=12.5。从图4中可以看出,对于低转速(42.5和138 rad/s),更多的谐波落在7到25 rad/s之间的频率区域,其中扰动衰减不如其他频率的。对于高转速(225和363 rad/s)的电机,干扰的抑制效果更好从而导致位置误差更小。在任何速度下,波动都不会干扰邮寄机的正确操作。速率限制器是实现较好波动衰减的瓶颈,因为对抗快速变化的干扰需要很高的执行器带宽。
必须强调的是,实现这种控制方案需要昂贵的编码器。但是,
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[425375],资料为PDF文档或Word文档,PDF文档可免费转换为Word

