
英语原文共 12 页
一种新型双向无线电源控制器传输系统
摘要
无线充电(WPT)技术是一种无物理接触的应用场合的一种很有前途的供电技术。最近,双向WPT(BD-WPT)系统越来越流行,它是电网到车辆以及车辆到电网的应用,这基本上需要在两个方向的电力传输。 然而,BD-WPT系统本质上是复杂的,需要复杂的控制策略来提供同步以及调节两侧的功率流。 本文提出一种利用实测有功功率(P)和无功功率(Q)的新型控制器BD-WPT系统谐振网络的功率调节,在提供同步的同时,双向的功率流双方之间没有专用的通信接口控制电源传输。在拾音器上适用于单负载或多负载的BD-WPT系统的控制器,确保拾取器的伏安额定值变频器对电池的充电是最低的,通过保持无功负载侧谐振槽进气口功率最小。实验结果从一个1千瓦的原型系统显示仿真结果与仿真结果吻合较好,验证了所提出的控制器可用于BD-WPT系统的潮流调节系统。
关键字:电动汽车 电网集成 无线功率交接(WPT)。
1 介绍
无线充电(WPT)作为一种传输电能的方式,近年来受到越来越多的关注,没有任何物理接触。与其他技术相比,WPT技术提供了许多好处,如高效率,电流隔离,高可靠性,尤其在恶劣环境中。目前,WPT广泛应用于工业应用领域,如自动导向车辆、生物医学植入物、人员移动应用、电动汽车充电等。[1]-[12]这些WPT系统中的大多数主要是为需要单向电源的应用程序开发流。然而,目前双向WPT (BD-WPT)系统作为车载到网格(V2G)系统[13]-[19]在ev的网格集成中也越来越受欢迎。V2G的概念允许使用电动汽车电池作为一种具有成本效益的替代能源存储,以缓解波动,促进基于可再生能源的网络的动态需求管理。因此,许多BD-WPT系统集中于磁设计、建模、补偿拓扑、控制策略或网格接口[20]-[31],已经被提出来展示它们的适用性。
在提出的BD-WPT系统中,电流源WPT系统允许在电网和任意数量的独立负载之间进行双向电力传输,被认为更适合促进V2G[13]。采用并网双向变流器控制电网电流,并保持恒定[13]或柔性[30],[31]直流链路电压为拟议的BD-WPT系统。以单拾取负载为例,所提出的BD-WPT系统一般由相同的变换器拓扑和主拾取侧和补偿网络组成,与单向WPT系统相比,需要更复杂和鲁棒的控制。通常,潮流的方向和流量由相对相角或幅值控制转换器[13]、[24]、[29]-[31]产生的电压。在电池充电的应用中,希望将传输的有功功率保持在预定值,同时尽量减少谐振槽的无功功率。然而,由于失谐系统中参数和元件公差的变化,这种性能可能无法实现。在[32]中,提出了一种基于WPT系统工频下垂特性的潮流方向和潮流量的控制技术。然而,无功功率随着运行频率的变化而增加,这导致了电压安培额定值的增加。
另一方面,上述控制策略只有在拾取控制器与一次电源同步运行时才能实现,这意味着一次变换器产生的电压矢量的位置可以提供给拾取端。这可以通过在主端和拾取端之间使用专用的无线通信接口[33]-[35]来实现。但是,由于需要额外的硬件和软件,这样的解决方案显然会增加系统成本,降低系统的健壮性。提出了另一种同步技术[36],利用拾取侧绕组上的一个辅助装置产生同步信号来调节潮流。虽然该系统具有良好的鲁棒性和无无线通信能力,但附加绕组所接收到的信号对网络参数敏感,需要进行严格的补偿。
|
|
|
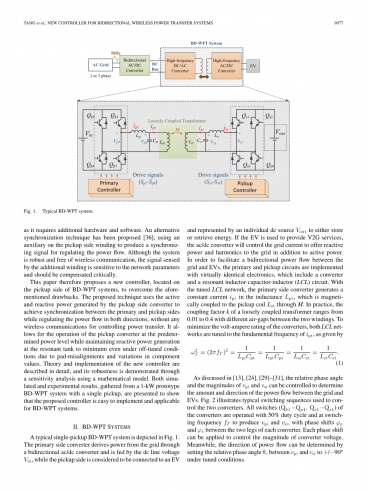
图1典型的BD-WPT系统 |
因此,本文提出了一种新的控制器,位于BD-WPT系统的拾取端,以克服上述缺点。该技术利用拾取侧变换器产生的有功功率和无功功率,实现一次侧和拾取侧的同步,同时调节两个方向的潮流,不需要任何无线通信来控制功率的传输。它允许拾取变换器在预定的功率水平上运行,同时将谐振槽的无功功率保持在最低水平,即使在由于pad失调和组件值变化的非调谐条件下也是如此。详细介绍了该控制器的原理和实现方法,并利用数学模型进行了灵敏度分析,证明了该控制器的鲁棒性。通过对单拾取1 kW原型BD-WPT系统的仿真和实验结果表明,该控制器易于实现,适用于BD-WPT系统。
2 BD-WPT系统
典型的单拾取式BD-WPT系统如图1所示。主侧变流器通过双向交流/直流变流器从电网中获取电能,由直流线路电压Vin供电,拾取侧被认为连接到以单个直流源Vout表示的EVand上,以存储或获取能量。如果使用电动汽车提供V2G服务,交流/直流变流器将控制电网电流,在提供有功功率的同时向电网提供无功功率和谐波。为了促进电网和电动汽车之间的双向潮流,主电路和拾取电路采用几乎相同的电子器件,包括转换器和谐振电感-电容-电感(LCL)电路。网络调优的拼箱,一次侧转换器生成一个恒流ipt涡轮电感,磁耦合的耦合线圈通过m . Lst在实践中,松耦合变压器的耦合系数k范围从0.01到0.4,不同的两个绕组之间的气隙。为了最小化变换器的伏安额定值,两个LCL网络都被调谐到ipt的基频,如下式所示:
如[13]、[24]、[29]-[31]所述,可以通过控制相对相角和vpi、vsi的大小来确定电网与电动汽车之间的潮流量和方向。图2显示了用于控制两个转换器的典型开关序列。所有开关(Qp1minus;Qp4, Qs1minus;Qs4)转换器的操作与50%的关税周期和生产新品和逆变器开关频率英尺,和相转变ϕpϕs每个变换器的两腿之间。每一相移可用于控制变频器电压的大小。同时,功率流的方向可以通过设置相对相角theta;c新品和vsi /minus;调谐条件下90°。
|
|
|
图2 BD-WPT系统的电压和电流波形 |
|
|
|
图3 一个BD-WPT系统的电路模型 |
两个全桥变换器产生的电压可以用傅立叶级数展开表示如下:
|
|
图1的原理图可以通过两个电压源vpi、vsi和一个阻抗网络进一步简化,如图3所示。采用串联漏感Lptl、漏感Lstl和磁化电感Lm = (Np/Ns) M建模,其中Np、Ns分别为一次匝数和拾取匝数。利用叠加定理,用短路代替电压源,计算了由vpi或vsi提供的单个电流。在相量域中,由主变换器和拾取变换器获得的电流可由下式得出:
|
|
Vpi(n), Vsi (n)是phase-domain电压转换器产生的基础和第n次谐波频率、Zp_in(n)、Zs_in(n)的等效阻抗从主和小源,Zs_p(n)和Zp_s(n)是对应的阻抗用来计算当前Ipi归因于Vsi(n)和Isi由于Vpi(n)。从图3中电路的不同端子上看,阻抗变量为:
|
|
由此得到阻抗Zs_p和Zp_s的表达式:
|
|
现在可以使用上述Vpi、Vsi、Ipi和Isi的表达式了解BD-WPT系统在任何给定操作条件下的功率流。例如,拾取侧变换器的视功率来源或消耗可以通过使用确定:
|
|
式中Ps和Qs为拾取变换器产生的有功功率和无功功率。将(1)-(8)代入(9)可得:
|
|
为了表征拾取侧的功率流,定义功率相角为:
|
|
|
|
|
图4 Cst对Ps, Qs和theta;c之间的关系的影响 |
将(1)-(11)代入(12)可得任意工况下的功率相角。应该注意的是,可以确保无功功率为零通过调节电源相角为0°、180°。如果新品的大小和Vsi使用相移调制ϕpϕs,电源相角可以控制通过调节之间的相对相角新品,Vsi弥补任何变化阻抗网络,如下式
|
|
通常,主端和拾取端上的LCL网络选择在频率fT处谐振。因此,将(1)-(8)代入(10)-(13)得到
|
|
式(16)为调谐条件下功率相角与相对相角的关系。因此,相对相角theta;c /minus;90°对应电源相角theta;、0°、180°,分别。然而,BD-WPT系统对元件公差和绕组之间的偏差非常敏感,这可能导致系统在非调谐状态下运行。例如,用(1)- (11),Ps的变化,Qstheta;c的函数可以确定如图4所示,通过改变Cst系统失谐其名义价值的80%和120%,低水位体系域minus;Cst和Lsiminus;中科调优网络受到Cst。可以看到,Ps和Qs改变了共振分量的变化值。在实践中,调谐BD-WPT系统操作与零Qs基本上保持相对相角theta;c /minus;90°,也对应于一个功率角theta;Power 0°、180°。然而,如图4所示,系统在失谐条件下总是偏离零qs运算。为了减少这种不良条件下的无功功率,相对相角theta;c应该不同的值导致零Qs或对应的功率角theta;、 0°或180如图4中所示。例如,对于失谐条件在图4中,相对相角theta;c应该为45°c变化到135°,从0.8 Cst变化到1.2 Cst。
|
|
|
图5提出的控制技术 |
因此,基于以上数学分析调优和失谐条件下,现在更有效的控制相对相角theta;c皮卡身边的这样一种方式运作在功率角theta;、0°、180°,以确保有功功率转移发生在两个方向统一功率因数。相对相角theta;c可以控制的任意组合阶段调节ϕsϕs,所需的任意数量的权力交接。下一节将介绍基于PQ的同步功率控制技术。
3提出控制方法
如图5所示,针对BD-WPT系统中的拾取变换器,提出了一种基于PQ的控制器。从图中可以看出,利用拾取变换器产生的感测电压和电流实时测量系统的潮流,得到Vpi与Vsi的相对相位角。与[36]中报道的同步方法不同,该控制是通过推导潮流来实现的,而不是通过感应ipt产生的磁场来实现的。虽然[36]中的感测信号与主逆变器产生的电压矢量同步,但在不同的工作条件下,有功功率无法调节到任何给定的量。这还不包括分离ipt产生的磁场的复杂性。
|
|
|
图6控制框图(a)同步和(b)传输功率 |
描绘在图5中,硬件处理器由一个90°移相电路、乘数,低通滤波器(lpf)和偏置电路。当前isi最初采样和乘以采样电压逆变器实时有功功率p .与此同时,实时无功功率Q是测量与产品的90°转向isi和vsi采样。P和Q的平均值是用两个LPFs得到的。偏移电路的实现是为了避免负值被传递到DSP处理器的ADC接口。图5中的DSP控制器用于提取拾取变换器的驱动信号。实现了主控制器和拾取控制器的同步,并相应地调节传输功率的两个控制回路。
正如[37]中所讨论的,拾取变换器必须与主变换器以相同的频率工作,以便将电源从主变换器传输到拾取器。如果两个变换器在不同的频率下工作,拾取端接收到的功率会发生振荡,导致实际传输功率为零。因此,如图6(a)所示,采用电压控制振荡器(VCO)锁住拾取开关的频率,使计算的功率相位角与参考点的相位差为零。
通常逆变器的工作是从VCO初始频率开始的,这可能与主变频器的工作点不同。因此,由于所检测到的振荡功率流,将功率相位角差引入VCO控制器。估计功率相角与参考theta;P ref相比,代表所需的功率流的方向,错误是美联储通过比例-积分(PI)控制器。因此,通过vco得到一个频率,该频率可用于调节拾取变换器产生的电压矢量,从而控制潮流。从图2可以看到,相对相角theta;c新品和逆变器之间的变化通过改变Vsi的相位延迟。与此同时,基于(9)比较测量功率P和所需的功率,误差信号转移到一个独立的PI控制块生成变量ϕs调控功率转移,如图6所示(b)。
为了说明提出的操作控制器,调整控制theta;ctheta;Power 0°,调谐和失谐条件下,证明了电压和电流的相量表示,如图7所示。由(5)可知,Isi由图7中Isi(p)和Isi(s)所表示的两个分量组成,分别由Vpi和Vsi通过阻抗Zp s和Zs in产生。由(7)可知,当系统被调谐到开关频率时,Zs in的增益是无穷大的,Zp s是电感的。因此,Isi(s)是零和Isi(p)垂直新品,结果在0°相对相角Isi和逆变器之间,如图7所示(一个)。在这种情况下,只有真正的权力控制theta;c所吸收,90°。然而,在实际应用中,由于组件值的变化和衬垫偏差,LCL电路并没有得到完美的调谐。例如,图7(b)显示了失谐条件下的电流和电压相量。与调谐条件相比,输入阻抗Zs不是无穷大的,这就引入了由Vsi产生的电流Isi(s)。可以看到,向量之间的相位差Isi和Vsi可以通过增加theta;c消除。
图8为控制拾取变换器功率流的驱动信号序列。一方面,通过调节拾取变换器各支路控制信号的延时来控制功率相位角;同时,利用VCO调节控制信号的频率,使其与一次工作频率相匹配。另一方面,功率控制的数量按照参考通过调整相移,ϕs1ϕs2图8所示,两种之间的传感器转换器同时保持恒定和传感器之间的相位角常数。由此可见,该方法的优点之一是对潮流方向和传输有功功率的解耦控制。虽然本文所提出的控制方法用

