英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
机械和机器原理
ZN型沙漏蜗轮副的数学模型和蜗轮齿工作面
摘要
在这项研究中,沙漏蜗轮组由ZN型沙漏蜗杆和直线型刀片切割器以及由蜗杆式沙漏滚刀产生的ZN型沙漏蜗轮组成。 基于其产生机理和齿轮传动理论推导出ZN型沙漏蜗轮副的数学模型。 根据所开发的齿轮组数学模型,给出了ZN型沙漏蜗杆和蜗轮的计算机图形。 研究ZN型沙漏蜗轮副在不同导角,压力角和模数下的齿面,边界线和接触线,并与ZA型沙漏蜗轮副进行对比。
2009 爱思唯尔有限公司保留所有权利
简介
许多研究人员已经研究了蜗轮副的特性和接触特性, 由于他们的努力,蜗轮副的效率和使用寿命大大提高。 与传统的蜗轮传动相比,沙漏蜗轮传动有更高的接触比。 具有较高接触比的齿轮传动可能会增加机器受冲击载荷的吸收能力。 Maki和Sakai开发了一种新型的沙漏型蜗杆传动装置,其齿面可精确磨削。 石田 研究了一种新的平面齿形蜗轮及其包络沙漏蜗杆。Maki和Sakai也研究了接触式滑动比的沙漏蜗杆传动装置。 Winter和Wilkesmann提出了一种获得更精确的蜗轮表面的计算方法。 Simon研究了用于蜗轮表面的高精度滚刀的制造。 Simon也提出了一种地面双包络蜗轮传动。地面蜗杆传动装置的齿轮表面光滑,并且由飞行工具成形,其刀刃与蜗轮进入边缘的轮廓相同。 Simon也研究了双包络蜗杆传动装置,它的弹性流体动力学承载能力更好并且功率损失更低。 Gunbara等人通过使用两种具有较大导角的沙漏蜗轮将应用带入齿轮设计。 Fang和Tsay基于滚齿机构和滚刀切削参数推导出了ZN型蜗轮副的数学模型。 Janninck提出了一种预测初始接触模式的方法,并通过在整个蜗轮表面上应用表面分离拓扑图来显示其结果。 Litvin和Litvin和Fuentes开发了ZA型沙漏蜗轮副的数学模型。Shi等人研究了双包络蜗杆传动的接触变形,通过三维接触有限元方法分析啮合齿对中接触区域和载荷分布的变化。
在这项研究中,研究了一种ZN型沙漏蜗轮副。 ZN型沙漏蜗杆由直刃式切割刀片切割而成,ZN型沙漏蜗轮由与ZN型沙漏蜗杆相同的蜗杆式沙漏滚刀制成。 ZN型沙漏蜗轮副的数学模型是根据齿轮传动理论和齿轮产生机理开发的。生成的共轭式沙漏蜗轮副的轴承触点处于线接触。 ZN型沙漏蜗杆和蜗轮的计算机图形是基于所开发的蜗轮副的数学模型绘制的。此外,还研究了ZN型沙漏蜗轮的齿面,接触线和接触线的边界,并与ZA型相比较。发现ZN型沙漏蜗轮副的接触面积增加了ZA型的两倍以上,其导角增加到30°。沙漏蜗杆的压力角和正常模块的增加齿轮组也会导致其齿面工作表面的增加。所提出的分析程序和开发的计算机辅助仿真程序对沙漏蜗轮副的设计和接触分析最有帮助。
2. 直刃式切割刀片的数学模型
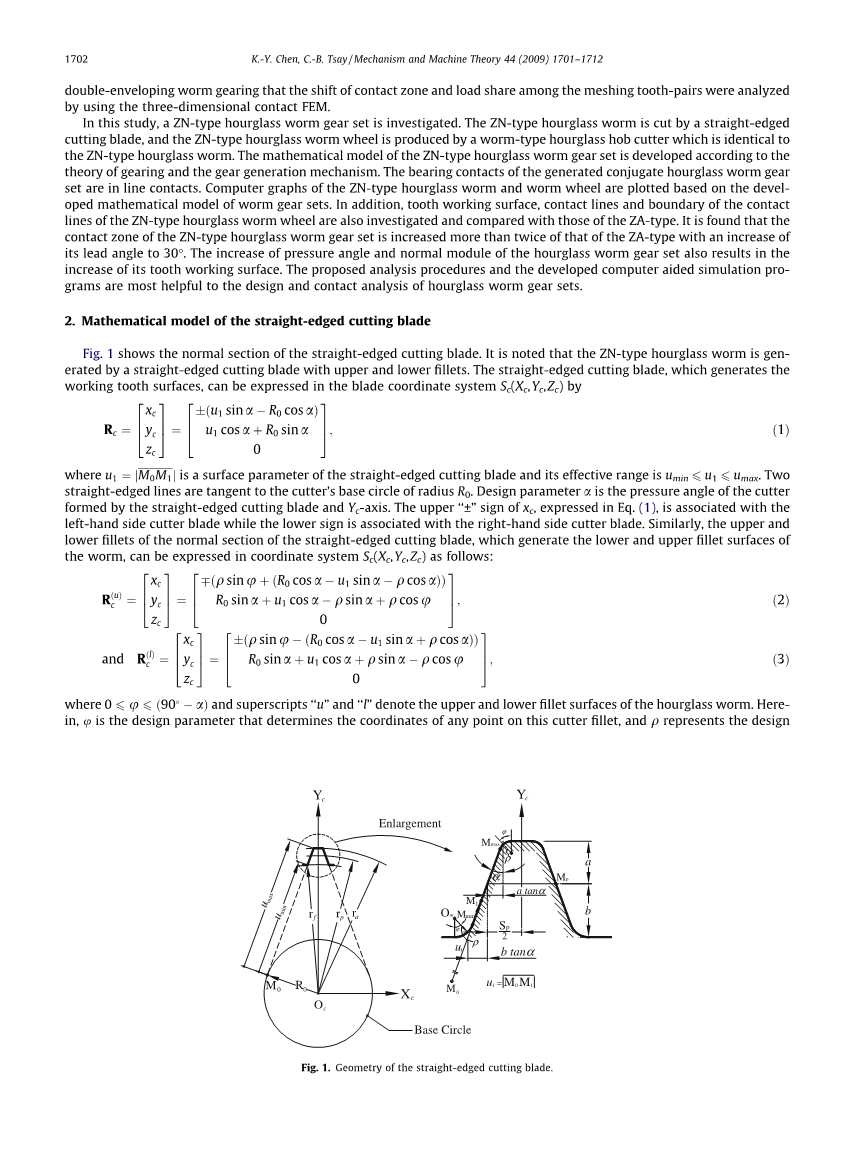
图1显示了直刃式切割刀片的几何模型。 注意到ZN型沙漏蜗杆是由具有上下圆角的直刃切割刀片组成的。 产生工作齿面的直刃切割刀片可以用刀片坐标系Sc(Xc,Yc,Zc)表示为:
其中u1 = M0M1是直边刀片的表面参数,其有效范围是umin < u1 < umax。 两条直线与刀具半径为R0的基圆相切。 设计参数a是由直边刀片和Yc轴形成的刀具压力角。 xc的上部“plusmn;”符号,用方程 (1)与左侧切割刀片相关联,而下侧标志与右侧切割刀片相关联。 类似地,产生蜗杆的下部和上部圆角表面的直边缘切割刀片的正常部分的上部和下部圆角可以用坐标系Sc(Xc,Yc,Zc)表示如下:
其中和上标“u”和“l”表示沙漏虫的上下圆角表面。 这里,u是决定该切刀圆角上任意点的坐标的设计参数,q表示圆角半径的设计参数。 方程式的上部“plusmn;”符号 (2)和(3)表示左侧圆角,而下侧符号表示右侧圆角。
图1. 直刃式切割刀片的几何模型
图2示出了ZN型沙漏蜗杆和切割片之间的坐标系。 在图2中,坐标系Sb(Xb,Yb,Zb)表示叶片坐标系,坐标系Sc(Xc,Yc,Zc)安装在直边切割刀片上(如图1所示),而Sa (Xa,Ya,Za)是沙漏蜗杆坐标系,轴Zb和Za分别是切割刀片和生成的沙漏蜗杆的旋转轴。 在沙漏蜗杆的切割过程中,直边切割刀片的正常截面应该相对于蜗杆旋转轴线Za形成一个导角k。 因此,当蜗杆坯料以旋转速度x1绕轴线Za旋转时,刀片围绕轴线Zb执行旋转速度xb。 根据图2a,通过应用以下齐次坐标变换矩阵方程,可以在坐标系Sb中表示直边刀片切割器的正常截面:
(4)
其中
图2. ZN型沙漏蜗杆和切割片之间的坐标系
并且Rb和Rc分别表示在坐标系Sb(Xb,Yb,Zb)和Sc(Xc,Yc,Zc)中表示的直刃式切割片表面的正常部分的位置矢量。 Mbc是变换矩阵的齐次坐标变换矩阵
从坐标系Sc到Sb的位置矢量。 用方程 (1)代入方程 (4)中,直边切割刀片的轮廓因此可以用坐标系Sb表示
同样,方程式中的#39;plusmn;#39;符号的上部符号。 (5)表示左侧表面,而下侧表示右侧表面。 用方程 (2)和(3)代入方程 (4)得出在坐标系S中表示的刀片切刀的上下圆角表面如下:
方程式中“plusmn;”符号的上限 (6)和(7)表示左侧圆角表面,而下侧表示右侧圆角表面。
3. ZN型沙漏蜗轮的数学模型
图2b示出沙漏蜗杆的示意性生图,其中坐标系Sb(Xb,Yb,Zb)表示切割刀片坐标系,S1(X1,Y1,Z1)连接到蜗杆,Sf(Xf,Yf ,Zf)为固定坐标系,Sa(Xa,Ya,Za)为参考坐标系。 在沙漏蜗杆的生成过程中,当蜗杆的坐标系S1(X1,Y1,Z1)绕Z1旋转时,切割刀片的坐标系Sb(Xb,Yb,Zb)绕Zb轴旋转一个角度/ 轴通过一个角度/ 1。 通过应用以下齐次坐标变换矩阵方程可以在蜗杆坐标系S1(X1,Y1,Z1)中表示切割刀片的轨迹:
(8)
其中
沙漏蜗杆和切割刀片之间的旋转轴是交叉轴,这两个轴之间的最短距离是G.即
(10)
其中rb和r1分别是切割刀片和沙漏蜗杆的圆半径。 沙漏蜗杆和切割刀片角速度的比值m1b定义为:
(11)
其中; T1和Tb分别是蜗杆和切齿的数量。
用方程 (5)和(9)代入方程 (8)可知,坐标系S1(X1,Y1,Z1)所表示的ZN型沙漏蜗杆R1的表面方程可以表示为:
其中u1和1是沙漏蜗杆的表面参数。 在等式 (12)中,“plusmn;”符号的上标记表示左侧沙漏蜗杆表面,而下标记表示右侧沙漏蜗杆表面。 类似地,将方程(6),(7)和(9)代入方程 (8)式中,坐标系S1(X1,Y1,Z1)表示的ZN型沙漏蜗杆的上,下圆角面的向量方程可以表示为
其中,是沙漏蜗杆圆角的表面参数。 在等式 (13)和(14)中,上面的“plusmn;”符号表示左侧圆角表面,而下侧符号表示右侧圆角表面。
可以得到沙漏蜗杆的表面法向量N1,和,并在坐标系S1(X1,Y1,Z1)中表示为:
(15)
(16)
和 (17)
其中
其中上标“b”,“u”和“l”分别表示沙漏蜗杆的工作表面,上圆角表面和下圆角表面。
根据公式(15) - (17)中,ZN型沙漏蜗杆表面和圆角表面的表面法线可以如下获得:
其中
在式(18)中,“plusmn;”符号的上标记表示左侧的蜗杆表面,而下侧的符号表示右侧的蜗杆表面。
4. ZN型沙漏蜗轮的计算机图形
表1列出了ZN型沙漏蜗杆刀片切割机的一些主要设计参数。值得注意的是,k是蜗杆在蜗杆中间平面(最小直径部分)内的导程角,它沿着蜗杆轴线变化。根据所开发的ZN型沙漏蜗杆的数学模型,ZN型沙漏蜗杆的三维齿廓如图3所示。沙漏蜗杆表面点的坐标也可以通过应用开发了数学模型。
5.沙漏蜗杆式滚刀和蜗轮的啮合方程
沙漏蜗杆式滚刀与ZN型沙漏蜗杆相同,用于生成沙漏蜗轮。沙漏蜗轮的示意切割机构如图4所示。
表格1:ZN型沙漏蜗杆刀片主要设计参数
|
项目 |
参数 |
|
|
刀具导角 |
lambda; |
5.0° |
|
刀具的压力角 |
alpha; |
20.0° |
|
刀具模数 |
2.0mm/tooth |
|
|
刀具节圆半径 |
47.04mm |
|
|
刀具基圆半径 |
21.92mm |
|
|
涡轮的线程数 |
T1 |
1 |
|
涡轮的导角 |
lambda; |
5.0° |
|
涡轮节圆半径 |
R1 |
22.0mm |
|
涡轮传动装置的交叉角 |
gamma; |
90.0° |
图3:ZN型沙漏蜗轮的计算机图形
图四:沙漏蜗轮蜗杆的示意切割机制
Sh(Xh,Yh,Zh)与沙漏蜗杆式滚刀相关联,S2(X2,Y2,Z2)与沙漏蜗轮相连,因此(Xo,Yo,Zo)和Sp(Xp,Yp, Zp)分别为沙漏蜗杆式滚刀和蜗轮的参考坐标系,Sf(Xf,Yf,Zf)为固定坐标系。 Z轴和Z2轴分别为ZN型沙漏蜗杆刀具和蜗轮的旋转轴。从Zf轴到Zp轴测量的参数c是沙漏滚刀和蜗轮的交叉角。参数H是这两个旋转轴的最短中心距,它可以表示为
H = rh r2; (19)
其中rh和r2分别是沙漏蜗杆式滚刀和蜗轮的节圆半径。
在图4中,/ h和/ 2分别是在切割过程中沙漏蜗杆式滚刀和蜗轮的旋转角度。因此,蜗轮的角速度可以以参考坐标系表示
Sp(Xp,Yp,Zp)通过
, (20)
其中符号k(p)表示Zp轴的单位矢量。
这个角速度也可以在坐标系中表示
以坐标系Sh(Xh,Yh,Zh)表示的沙漏蜗杆式滚刀的角速度为
最短轴向距离| OhO2 |的位置矢量 也可以用坐标系Sh(Xh,Yh,Zh)表示;
根据公式 (21) - (23)中,用坐标系Sh表示的沙漏蜗杆刀具和蜗轮的相对速度可以通过应用以下公式得到:
(24)
其中Rh是滚刀和蜗轮共同接触点的位置矢量,用坐标系Sh表示,如方程(12)。 将方程(12),(21),(22)和(23)代入方程 (24)式中,沙漏蜗杆刀具和蜗轮的相对速度可以得到如下:
由于滚刀和蜗轮之间的共轭作用,相对速度V dhh2垂直于共同表面法线Nh,其中Nh = N1。 因此,必须遵守以下等式
(26)
将(18)和(25)式代入(26)得:
方程(27)是所谓的啮合方程式,其将沙漏蜗杆式滚刀的表面参数与所产生的沙漏蜗轮的切割运动参数相关联。
6. ZN型沙漏蜗轮表面的数学模型
根据图4所示的坐标系,沙漏蜗杆式滚刀的轨迹可以用坐标系S2表示
(28)
这里
参数c代表ZN型沙漏蜗轮副的交叉角度。由于沙漏蜗杆式切割机的几何形状与ZN型沙漏蜗杆的几何形状相同,所以位置矢量R1 = Rh和法向矢量N1 = Nh。用方程(12),(13),(14)和(29)代入方程(28)中,沙漏蜗杆刀具的轨迹方程可以在蜗轮坐标系S2中表示如下
其中参数Rhx,Rhy和Rhz的定义与公式(12) - (14)由于R1 = Rh。 ZN型沙漏蜗轮表面的数学模型可以通过参考方程(27)和(30);
7. ZN型沙漏蜗轮的计算机图形
回过头来看,式(12)定义了ZN型沙漏蜗杆的左侧和右侧齿面,而方程(27)和(30)表示ZN型沙漏蜗轮的左侧和右侧齿面。表2显示了ZN型沙漏蜗轮副的一些主要设计参数。蜗轮齿面点的坐标可以通过应用所开发的蜗轮数学模型来计算。三维沙
全文共9195字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[9342],资料为PDF文档或Word文档,PDF文档可免费转换为Word

