
英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
基于增强存在感的LED系统的日光集成照明控制
Ashish Pandharipandelowast;, David Caicedo
飞利浦研究院,HTC 34-1.41,5656 AE 埃因霍温 荷兰
关键字:智能建筑、节能照明系统、基于LED照明系统的照明控制、现场传感、日光集成照明
摘要:
发光二极管(LEDs)被认为是未来照明的主要来源,寿命长、节能、可调。适应LED参数的灵活性为设计基于LED的照明系统提供了多个自由度。在本文中,我们考虑了基于LED的办公空间照明系统的节能照明控制设计。我们的目标是确定LED光源的最佳亮度,从而尽量减少能量消耗,同时渲染(i)的照明度在工作区区域的照明水平,以及在未被占领地区的最低照明度最低的照明度,同时考虑到工作空间平面上的日光分布。为了确定居住者的位置,我们提出了一种超声阵列传感器解决方案,增强了存在检测能力。我们还提出了一种估计和分离工作空间平面处的日光和不同LED光源的照明贡献的方法。在不同的占用场景下,对我们提出的控制解决方案的性能进行了评估
- 介绍
能源效率是智能照明系统和绿色建筑设计的驱动力之一。在办公楼中,光是照明就占总能耗的25-35%[9]。照明系统的能源消耗可通过纳入节能光源、适当设计照明控制和基于占用和日光的传感信息控制照明系统来解决。
发光二极管(LEDs)作为一种节能的照明光源是一个有吸引力的选择,它可以提供长寿命、动态照明效果和更大的设计灵活性。控制单个LED灯的灵活性可用于在基于LED的系统中呈现动态照明,同时实现节能。
在本文中,我们考虑了一个基于LED的照明系统在办公环境中的照明渲染。正在考虑的照明系统包括多个基于LED的光源、光电传感器和在场传感器。我们感兴趣的是多个方面造成节能系统设计:增强存在传感、和照明控制优化,考虑存在信息和日光的贡献。照明控制是指根据一定的设计标准来确定LED调光电平。在本文中,我们的设计目标是在考虑工作空间平面上的日光照明的情况下,通过确定led的最优调光级别,使功耗最小化,从而呈现腰部被占用区域的照明级别和在别处的最低照明级别。根据办公空间照明建议选择照明等级和亮度[8]。
占领地区决定使用一个传感器。具体来说,我们建议用超声波阵列传感器来确定使用者的存在和位置。超声传感器提供了一种主动的方式来监测存在于大容量空间,并可能比被动红外传感器更敏感。超声传感器在过去已经被用于乘员检测[7,13,18,23]。过去的解决方案是基于时间飞行或多普勒测量的单个元件传感器,并且仅提供了二进制室级占用信息。
我们的阵列传感器解决方案包括一个发送周期性脉冲正弦信号的发射器。该接收机包括一组线性传感器阵列,用于处理每两个连续发射脉冲对应的接收回波,以确定居住者的位置。第2节描述了获取多个居住者位置所涉及的各种信号处理步骤。
有几项研究[2,10,21](以及其中的参考文献)表明通过设计适应居住者存在的照明系统可以实现相当大的节能[25]。最简单的形式是,占用信息用于控制房间内的整个照明系统,只有在确定房间被占用时才提供照明。使用者的存在是由简单的运动探测器决定的,如被动红外传感器、超声传感器或两者的组合。这些传感器输出的信息是一个二进制值,指示所监视的空间是否被占用。这些信息只能在监测空间整体为空的情况下实现能量增益,节能潜力有限。例如,在一个多人办公的办公室里,如果只有一个人在场,整个照明系统就会打开。此外,不可能利用LED系统提供的设计自由度。
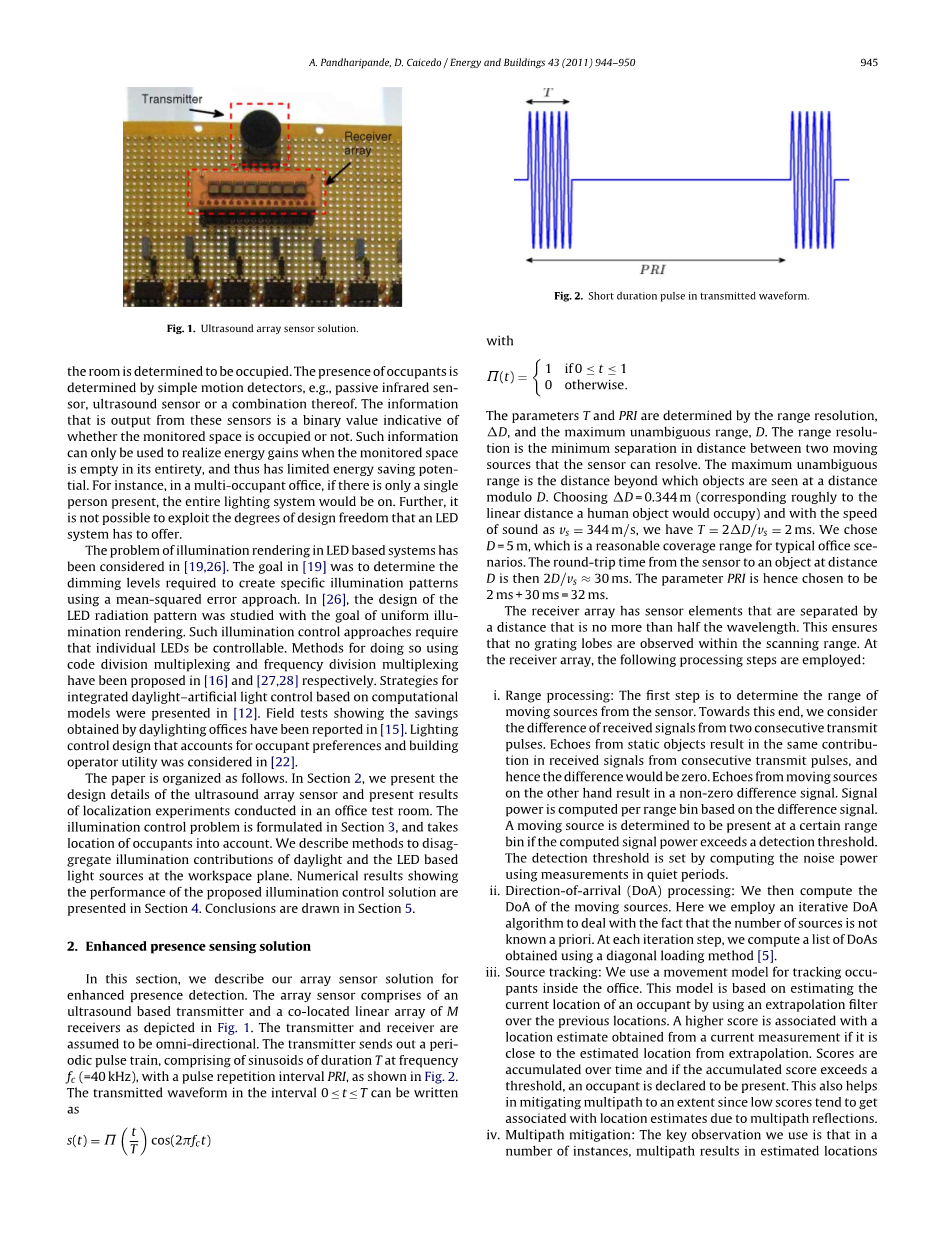
图1所示。超声波阵列传感器解决方案。 图2所示。传输波形的短脉冲。
基于LED的系统中的光照渲染问题在[19,26]中已经得到了考虑。[19]的目标是使用均方误差方法确定创建特定照明模式所需的调光级别。在[26]中,以均匀光照渲染为目标,研究了LED辐射图案的设计。这种照明控制方法要求单个led是可控的。[16]和[27,28]分别提出了使用码分复用和频分复用的方法。在[12]中提出了基于计算模型的人工采光综合控制策略。现场试验表明,采光办公室所节省的费用已在[15]中报告。在[22]中考虑了考虑居住者偏好和建筑操作者效用的照明控制设计。论文组织如下。在第二部分,我们展示了超声波阵列传感器的设计细节,以及在一个办公室测试室内进行的定位实验的结果。照明控制问题在第3节中阐述,并考虑了居住者的位置。我们描述了在工作空间平面上分解日光和LED光源的照明贡献的方法。数值结果显示了所提出的照明控制解决方案的性能在第4部分。结论见第5节。
- 增强存在感测解决方案
在本节中,我们将描述用于增强存在检测的阵列传感器解决方案。阵列传感器包括基于超声的发射机和如图1所示的m接收机的共定位线性阵列。假定发射机和接收机是全方位的。发射机发出一个周期脉冲序列,包括频率为fc(= 40khz)的持续时间为T的正弦信号,脉冲重复周期为PRI,如图2所示。传输波形的间隔0le;tle;Tcan写成s(t)
和参数标准由距离分辨率D和最大无二义距离D确定。距离分辨率是传感器能够解决的两个运动源之间距离的最小距离。最大无二义范围是在一个距离模态上所看到的物体的距离。选择D= 0.344 m(大致对应于人类物体所占的直线距离),声速asvs =344 m/s时,得到2D/vs =2 ms。我们选择D= 5 m,这对于典型的办公场景来说是一个合理的覆盖范围。往返时间从传感器到一个对象在距离说2 d / vsasymp;30 ms。因此选择参数PRI为2ms 30ms=32ms。接收阵列的传感器元件之间的距离不超过波长的一半。这保证了在扫描范围内没有观察到光栅叶。在接收阵列中,采用以下处理步骤:
- 距离处理:第一步是确定来自传感器的移动源的距离。为此,我们考虑了来自两个连续发射脉冲的接收信号的差异。来自静态对象的回波对来自连续发射脉冲的接收信号的贡献是相同的,因此差值为零。另一方面,来自移动源的回波会产生非零差分信号。信号功率根据差值信号按距离仓计算。如果计算出的信号功率超过检测阈值,则确定移动源存在于某一范围箱内。检测阈值的设定是通过在安静时段测量噪声功率来实现的
- 到达方向(DoA)处理:然后计算移动源的DoA。在这里,我们使用迭代DoA算法来处理源的数量不是先验的这一事实。在每个迭代步骤中,我们计算使用对角加载方法[5]获得的DoAs列表。
- 来源跟踪:我们使用移动模型来跟踪办公室内的人员。这个模型是基于使用一个外推滤波器估计居住者的当前位置。如果当前测量值接近外推估计的位置,则更高的分数与从当前测量值获得的位置估计值相关。分数是随着时间累积的,如果累计分数超过阈值,则宣布乘员在场。这也有助于在一定程度上减轻多路径,因为由于多路径反射,低分数往往与位置估计相关联。
- 多路径缓解:我们使用的关键观察是,在许多情况下,多路径导致不可行的估计位置。例如,多路径可能会导致估计的位置落在房间的尺寸之外,可以丢弃。
以上步骤所涉及的信号处理技术在[3]中有详细描述。步骤(i) - (ii)共同确定房间内居住者的位置,而步骤(iii)和(iv)则用来改进位置估计和确定居住者的运动轨迹。这些步骤导致了可靠的存在感测和定位解决方案。在特殊情况下,当使用者被阵列传感器阻挡,或长时间处于静止状态时,仍可能发生检测错误。然而,这种情况可以在照明控制器中适当地处理,例如,通过使用计时器来处理一些漏检。
图3所示。测试室和人员的飞行轨迹。 图4所示。房间的规划和居住者的轨迹。
图5所示。实验结果
2.1.实验结果
我们评估了阵列传感器解决方案在测试办公室的性能,如图所示。3.这个房间长4.5米,宽3米。阵列传感器位于距地面1.2米的高度,m = 8接收元件。
我们考虑以下两个人的场景。两个居住者的轨迹在地板上用许多标记点来表示。3和4。在实验开始时,房间是空的。然后,第一个居住者从房间的一侧进入,并沿着如图所示的轨迹近距离行走。4由星带标出。当第一个居住者到达“A”位置时,第二个居住者进入房间,并沿着如图所示的正方形轨迹近距离行走。4. 最后,两个房客都离开了房间。
实验结果如图所示。5. 图4和图5中第一和第二居住者轨迹上的点分别用星星和正方形表示。这两个人的估计轨迹用(红色)星号和(绿色)叉表示。可以看出,估计的位置与实际位置非常接近。(蓝色)叉表示作为多路径丢弃的位置
理论上,可以定位的最大居住者数量受线性数组元素数量的限制。此外,过于接近的居住者可能被视为一个物体。从办公室照明控制的角度来看,这些情况是不受限制的。功能本地化少数(3-4)居住者就足够了;对于分布在整个房间的更大数量的居住者,在任何情况下,照亮整个房间都是可取的。此外,如果两个居住者由于空间上的接近而被确定为一个单一的物体,这不是一个问题,因为附近的区域将根据下一节讨论的照明控制解决方案进行照明
图6 LED照明系统
- 照明控制方案
我们考虑一个基于LED的照明系统,该系统的天花板上有N个LED光源和K个光敏元件。图中是一个配置示例。其中若干个LED一起组成一个基于LED的光源。在某些配置下,光传感器可以耦合到光源上,这种情况下K=N。第i个LED光源的位置由坐标(习,yi)给出,并假设从调试计划中知道。我们考虑一个简单的LED光源照明模型。从LED光源获得的总照度是该光源中单个LED的照度的聚合叠加。对于第i个LED光源,设(xiv,yiv)为第v个LED的坐标,v=1,hellip;,v。利用广泛使用的广义传感器的函数[17,20,24]对LED远场照明模式进行建模,得到位于(xi,yi)的LED光源在工作空间平面(x, y)上(距离天花板的距离)的一个位置(x, y)处的照度为
(1)
和,其中ea0为光的光通量,mgt; 0为兰伯德模式。这种模式与光束的半角一半力量,˚1/2, ,我们假设一个基于频分复用的系统[28],其中每个LED源被分配一个不同的频率。采用脉宽调制(PWM)[11]控制LED光源的照度。PWM波形的占空比是LED光源的调光电平。因此,第i个LED光源在调光级di上一个波形周期的平均功耗为Pi (di )asymp;diPon, (2)
其中eponis为电源开时的功耗((2)中的近似是在关断状态功耗小到可以忽略的假设下)。比亚迪表示,然后times;1调光矢量,给出的d=[d1,d2,...,dN],
0le;dile;1在哪里调光的第i个来源。di = 0表示LED变暗,di = 1表示LED处于最大照度。在实践中,di从有限离散值集合{l1, l2,hellip;,lQ},其中lQ表示变暗电平,l1=0,lQ=1。
工作区平面与天花板在一定距离上是平行的,是需要进行特定照明渲染的平面。为了说明清楚,我们将不引入z坐标来区分这两个平面,因为从上下文中可以清楚地看出它们的区别。
此外,该厅还配备了第2节所述的在场检测传感器。假设办公室里有个女骑手。位置(xj, yj),j=1,hellip;,办公室内的人员由在场检测传感器确定。将被占用区域定义为与被占用位置之间的距离为0的所有点的集合,
(3)
并通过˝它的面积。常数r0可以根据工作空间规范和居住者的视觉舒适度来选择。
我们希望在被占领区域的水平面上有均匀的照明。在未占用的区域,希望有一个最低的照明水平的流感。根据办公室照明规范选择照明等级。在实践中,均匀照明是指照明水平的变化值必须低于一定的阈值。这个概念可以用照度对比来分析。表示工作空间平面(距离天花板)byET(x, y;h;d)上某点(x,y)的总照度,此时LED光源的调光电平由调光矢量d给出。ET(x, y;h;d)与Lo的照度对比度定义为[1]
(4)
总照度是日光和LED光源共同作用的照度。由D(x, y;h)和Ei (x,y;h)分别表示在(x,y)位置的工作空间平面上的照度和由于日光和第i个LED光源的距离
(5)
考虑到平均照度在Lo左右变化,我们进一步要求平均照度在Lo左右
其目标是确定LED光源的调光等级,从而以最小的功耗达到理想的照明渲染效果。这个照明控制问题可以用数学形式表示如下。我们想确定最优的调光矢量d*
关于(6)的可行性,应该提出一些意见。如果在工作空间平面的某一点,日光照度的贡献大于lo (1 Co),那么当这些点位于Ro时,第一个约束就不能满足。这是因为,即使所有LED来源在关闭状态,总照明水平(这是日光的贡献水平)会高于Lo(1 Co)在某些点上,从而对比将大于有限公司为了解决这一问题,我们丢弃所有点都有日光照明水平高于Lo从我们的优化问题。在某些情况下,大白天会导致不受欢迎的眩光,影响居住者的视觉舒适度。这可能是由于我们把强光控制,这可以通过电子百叶窗来实现,到我们的问题构想。
在求解(6)之前,需要解决以下几个方面的问题:既然在天花板上使用光传感器进行光照测量,我们如何确定工作区平面上各个点的光照值?在给定工作空间平面上的
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[443508],资料为PDF文档或Word文档,PDF文档可免费转换为Word

