英语原文共 13 页,剩余内容已隐藏,支付完成后下载完整资料
绞吸式挖泥船作业控制优化系统
摘要
手动控制疏浚过程的生产效率是非常低的。为了提高产量,降低单位成本,疏浚过程的自动控制是解决这一问提的有效途径。疏浚作业自动化一直是国内外学者多年积极研究的课题。本文在前人疏浚作业研究成果的基础上,介绍了一种用于疏浚作业过程在线优化和自动控制的专家控制系统。介绍了待处理问题的细节和基于专家系统的解决方案,重点介绍了专家系统的体系结构、知识表示和推理机制。专家控制软件程序是用C 开发的。在构建的测试平台的基础上,比较了ES的性能。实验表明,所提出的专家控制方案能够实现可接受的自动疏浚过程控制。
2007爱思唯尔有限公司版权所有。
关键词:自动疏浚;控制;绞吸式挖泥船
- 介绍
在疏浚工程中已经投入了大量的资金在设备及其维护上,而充分利用设备去尽最大程度的保持生产是操作盈利的本质。实际上,这往往是非常难以精确的估计和控制实际的生产的(Miertschin amp; Randall, 1997)。挖泥船可以在一些关键参数未知或已知但精度很差的环境下工作。有经验的工人在实际操作的过程中经常会注意到一些间接的信号,,如正红和压力,发动机转速,船的震动强度,泵或管道的异常噪音等。根据所获得的间接信号,有经验的操作员在发生故障时控制刀速、摆动绞盘速度、发动机转速或采取其他紧急动作。获得的信号和采取的行动是高度复杂的,他们不会轻易得出某种数学模型或规则之间的关系。
目前世界上正在投入使用的挖泥船超过一万艘,百分之九十五以上都是手动控制的。根据IHC荷兰的调查,随著连续工作时间的增加,操作性能在不同水平的操作者之间大大降低。为了获得最大的生产,以及智能控制解决方案,可以有效的利用不同操作者的经验,向有关人士学习也是可取的(IHC,2004;Miedema,2001)。随着计算机技术的高度发达,自动疏浚过程控制现在由学者和厂家积极研究。IHC荷兰,其中一个最重要的挖泥船建设者在这方面提出了一些改进(IHC,2004a)。日本学者曾提出了一种基于模糊逻辑的疏浚控制系统,它把操作经验,传感器输入和一些特殊的知识,从实验获得的,但没有对其实际性能的任何进一步的报告。
传统的控制方法已被证明适用于大多数应用。但对于复杂的疏浚生产优化案例来说,需要进行过多的知识决策的情况下,智能控制方法具有以往成功研究所显示的优势(Wang&Wang,2005; Uraikul,Chan, &Tontiwachwuthikul,2000)。专家系统为处理复杂系统提供了强大的工具。在过去的十年中,基于ES的技术已经广泛应用于控制和监测工程实践中。疏浚过程是一个高度不确定的非线性系统,其中流体力学和多相交通的一些基础尚未完全理解。荷兰代尔夫特大学和河海大学疏浚实验室的研究小组对疏浚过程的理论描述做了一些改进(Ding&Ni,2002; Matou-sek,2001; Miedema,1984; Ni,Xu,Vlasblom, Zwartbol,2001)。但目前的理论结果都是在严格限制的条件下得出的,这些条件与实际疏浚作业的复杂环境相差甚远。在人工疏浚过程中,工人的控制行为很大程度上取决于过去实践中积累的经验。采用能够模拟疏浚工人的推断和评估过程的基于知识的方案对疏浚过程进行自动控制是一种自然的想法。本文着重于开发专门的系统,目的是实现刀具吸取过程的实时优化和控制。
本文组织如下:第1部分简要介绍了疏浚专家系统建设的背景。 第二部分介绍了疏浚系统的构成和工作过程。 第3部分详细描述了自动疏浚过程的优化和控制问题。 第4部分介绍了开发的专家控制系统的结构。 第5部分和第6部分涉及ES的知识表示和推理机制。 第7部分简要介绍了用于评估拟议ES性能的疏浚系统的配置。 在第8部分中,介绍了ES的实验结果并对其进行了比较。 最后一部分得出了一个简短的结论。
- 绞吸式挖泥船的构成和工作过程
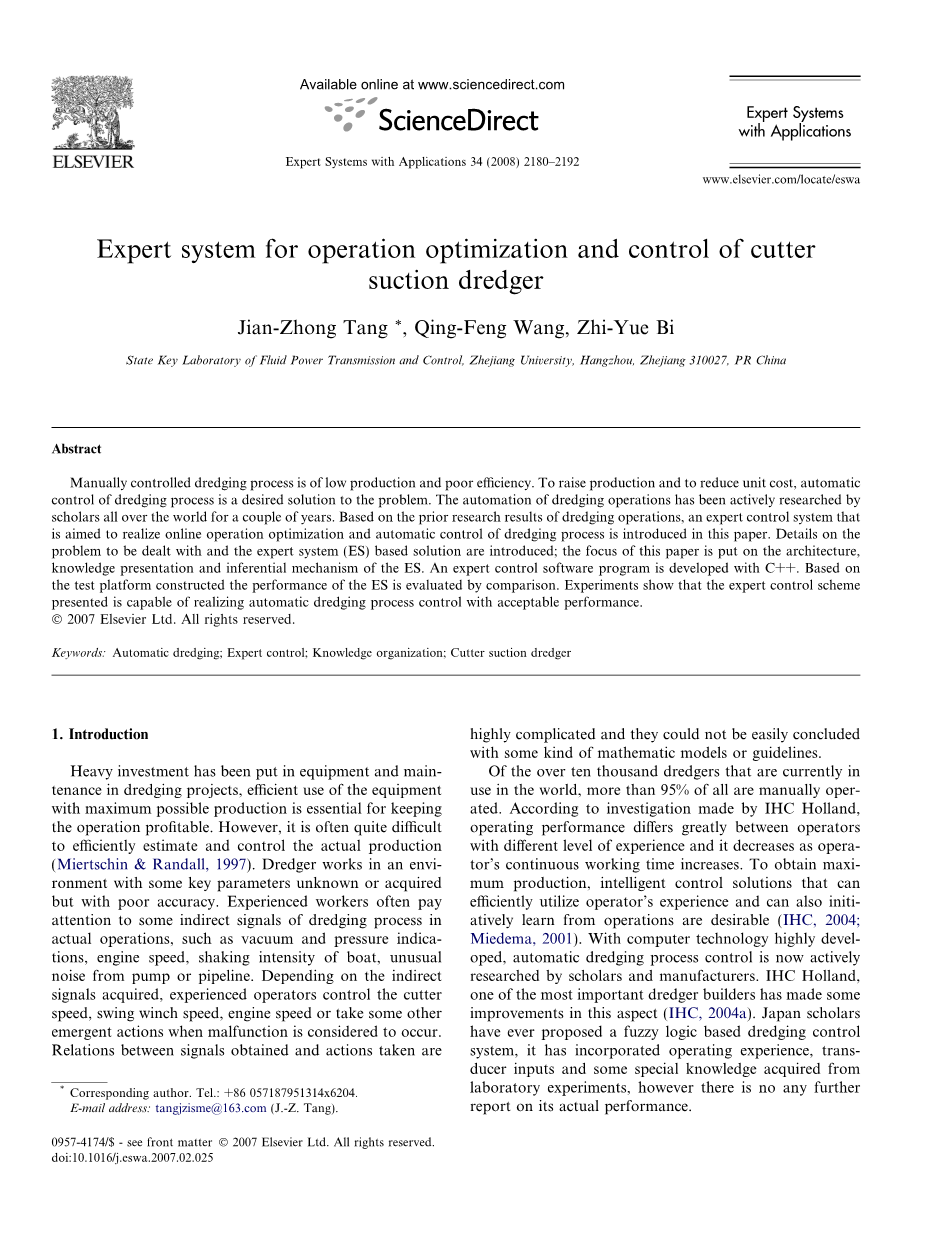
典型的绞吸式挖泥船的样本剖面如图1所示。切吸式疏浚系统在功能上可分为四个子系统,即泥浆输送系统,切割系统,液压系统和监控系统。
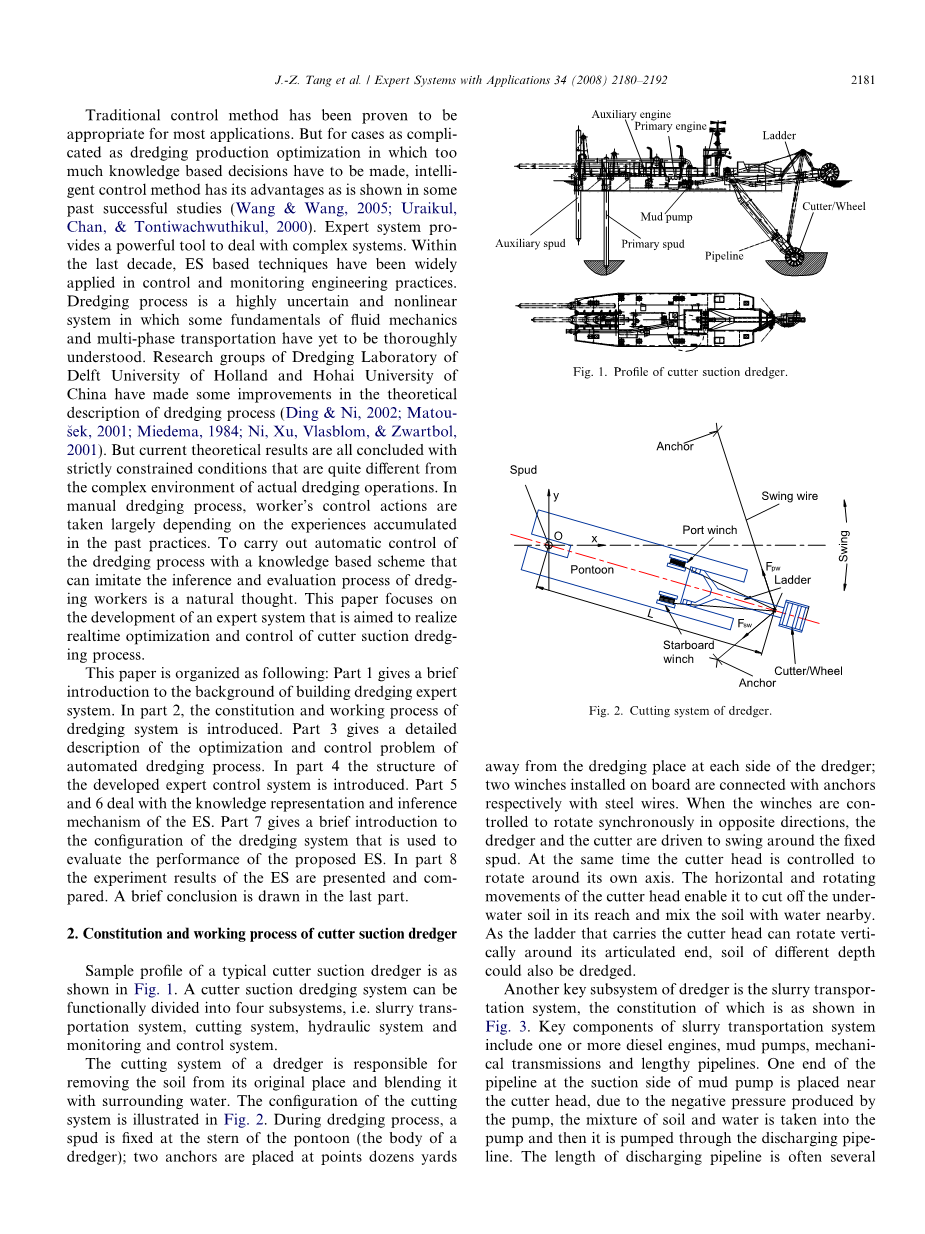
挖泥船的切割系统负责从原来的地方去除土壤并将其与周围的水混合。切割系统的结构如图2所示。在疏浚过程中,在浮体的尾部(挖泥船的主体)固定一个桩。两艘船锚位于挖泥船两侧疏浚处几十码远的地方;船上安装的两个绞车分别用钢丝连接锚。当绞车被控制在相反方向同步旋转时,挖泥船和切割机被驱动绕固定桩旋转。同时控制刀头绕其自身的轴旋转。切割头的水平和旋转运动使其能够切割水下土壤,并将土壤与附近的水混合。由于承载刀头的梯子可以在其铰接端周围垂直旋转,因此可以挖掘不同深度的土壤。
图一 绞吸式挖泥船的型材
图二 挖泥船切割系统。
挖泥船的另一个关键子系统是泥浆输送系统,其结构如图3所示。泥浆输送系统的关键组件包括一个或多个柴油发动机,泥浆泵,机械传动装置和长管道。 泥泵抽吸侧管路的一端靠近刀盘,由于泵产生的负压,将土壤和水的混合物带入泵内,然后通过排出管 - 线。 排水管道的长度通常为几英里长。 在远离疏浚场所的项目中,安装了多台泵和发动机。
疏浚环境具有高度的不确定性和不可控制性。 石块,草根和其他一些材料经常被切割并通过管道输送(见图4)。 切割和运输系统的严重故障极有可能; 尤其是在不太适当的控制过程中,这种情况属实 泥浆输送系统的故障占了疏浚系统所有故障的大部分。 通常最容易发生泵堵塞和管线堵塞。 故障检测和故障处理对疏浚作业非常重要。
疏浚作业是一个复杂的多执行器作业过程。为确保疏浚作业的可接受性能,必须实现所有子系统的协调控制。对于自动疏浚过程,建议使用控制系统的分层结构,如图5所示。每个执行器都指定一个控制器,所有控制器由上层优化和控制系统协调。顶部的优化和控制系统负责监视和评估疏浚过程的状态,并且还决定子系统的控制行为。优选地,优化和控制系统是智能单元,其可以有效地利用在人工疏浚作业中累积的疏浚过程控制的知识。这种单元的自学和自我改进能力肯定有利于其优化和控制性能。为了执行评估和优化任务,必须获得有关疏浚过程实时状态的知识。本文提出的基于ES的控制方案假定表1中所示的数据适时可用于疏浚过程。
图3 泥浆输送系统
图4 挖泥船的不利工作条件。
表一
Process data available from dredging process
|
No. |
Data |
Recommended |
Note |
|
transducers/ |
|||
|
apparatus |
|||
|
1 |
Dredging |
GPS |
|
|
location |
|||
|
2 |
Swing angle |
Gyro |
|
|
3 |
Swing speed |
Velocity |
|
|
transducer |
|||
|
4 |
Ladder |
Angle transducer |
|
|
position |
|||
|
5 |
Cutter speed |
Speed transducer |
Can also be calculated from |
|
the flowrate of hydraulic pump |
|||
|
6 |
Engine speed |
Speed transducer |
- Engine torque Torque
|
transducer |
|||
|
8 |
Dredging |
Acoustic |
|
|
depth |
sounder |
||
|
9 |
Slurry |
Concentration |
|
|
Concentration |
meter |
||
|
10 |
Slurry |
Flowrate meter |
Velocity is equal to the |
|
velocity |
flowrate divided by the cross |
||
|
section area of pipeline |
|||
|
11 |
Vacuum of |
Vacuum |
At inlet |
|
mud pump |
transducer |
||
|
12 |
Pressure of |
Pressure |
At outlet |
|
mud pump |
transducer |
||
|
13 |
Dredge |
Position |
|
|
advance |
transducer |
||
- 疏浚系统的优化与控制问题
本部分将讨论优化疏浚过程控制的目标以及必须考虑的优化问题约束。
3.1 疏浚作业的优化目标
切吸式疏浚工艺的操作优化目标是在保证过程安全的同时,获得尽可能最大的生产能力。 疏浚作业的实际生产可以表示为:W frac14; Q P
其中,Q为泥浆流量(m3 / h),P =(c cw)/(c0 cw)* 100%为泥浆体积浓度; c0是土壤的密度; CW是水的密度; c是浆料的密度。 Q和P的实际值受交通系统和环境特征的制约。 为了在真正的疏浚作业中为Q和P选择适当的值,疏浚土壤的性质起着重要的作用,然而,它的变化很大,并且不能准确地知道。
3.2泥浆输送系统的工作点
泥浆输送系统的工作点定义为Hp-Q曲线与Hl-Q曲线的交点。 Hp是泵的测压头(m),H1是管道的压力损失。
泵的Hp-Q曲线是离心泥浆泵的测压头与流量的关系曲线,它描述了一个疏浚泵的排放性能。泵送清水时泵的Hp-Q曲线由制造商提供,浆料输送的Hp-Q曲线随浆料浓度而变化。它们与水的Hp-Q曲线相似,但数值不同。它们可以用所谓的有效性法则来计算(Bree,1977)。
H1-Q曲线描述了管道的压力损失,管道的压力损失是根据流量绘制的。管道系统的布局对H1-Q曲线有显着影响。管道系统的总损失包括吸入口处的损失,直管段内的摩擦损失,弯管和阀门处的损失,静压头和由于排出泥浆速度造成的损失非零。
作为一个例子,图6中将一组H1-Q曲线和Hp-Q曲线一起绘制成图。 理论上,泥浆泵产生的压力必须等于管道系统的总压力损失。 在稳定的疏浚过程中,运输系统必须在Hl-Q曲线和Hp-Q曲线的某个交点处工作; 交点是确定实际工作点的地方。 工作点与疏浚过程的生产和安全密切相关。 疏浚作业的优化主要是工作点的动态评
全文共11944字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[13609],资料为PDF文档或Word文档,PDF文档可免费转换为Word

