英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
特提斯长距离水下航行器的有效推进
摘 要
特提斯水下航行器(AUV)是一个110公斤的水下航行器,设计特点为长距离,持久性长。性能目标包括在,负载功率为8瓦,在1m/s的速度下,能行动1000km,或是功率为1w 在0.5m/s的速度下行动4000km。未来实现这一点。 在性能上,要求最大限度地减少阻力和最大化推进效率。在本文中,我们进行了推进系统的设计,探讨了螺旋桨与船体相互作用的问题, 并给出初步测试结果的能量消耗与推进效率。在最近的水下实验中,通过系柱托力测试水下滑翔,测得了推进系统的功率。初步的功率和效率的结果显示,接近理论预测。
1.介绍
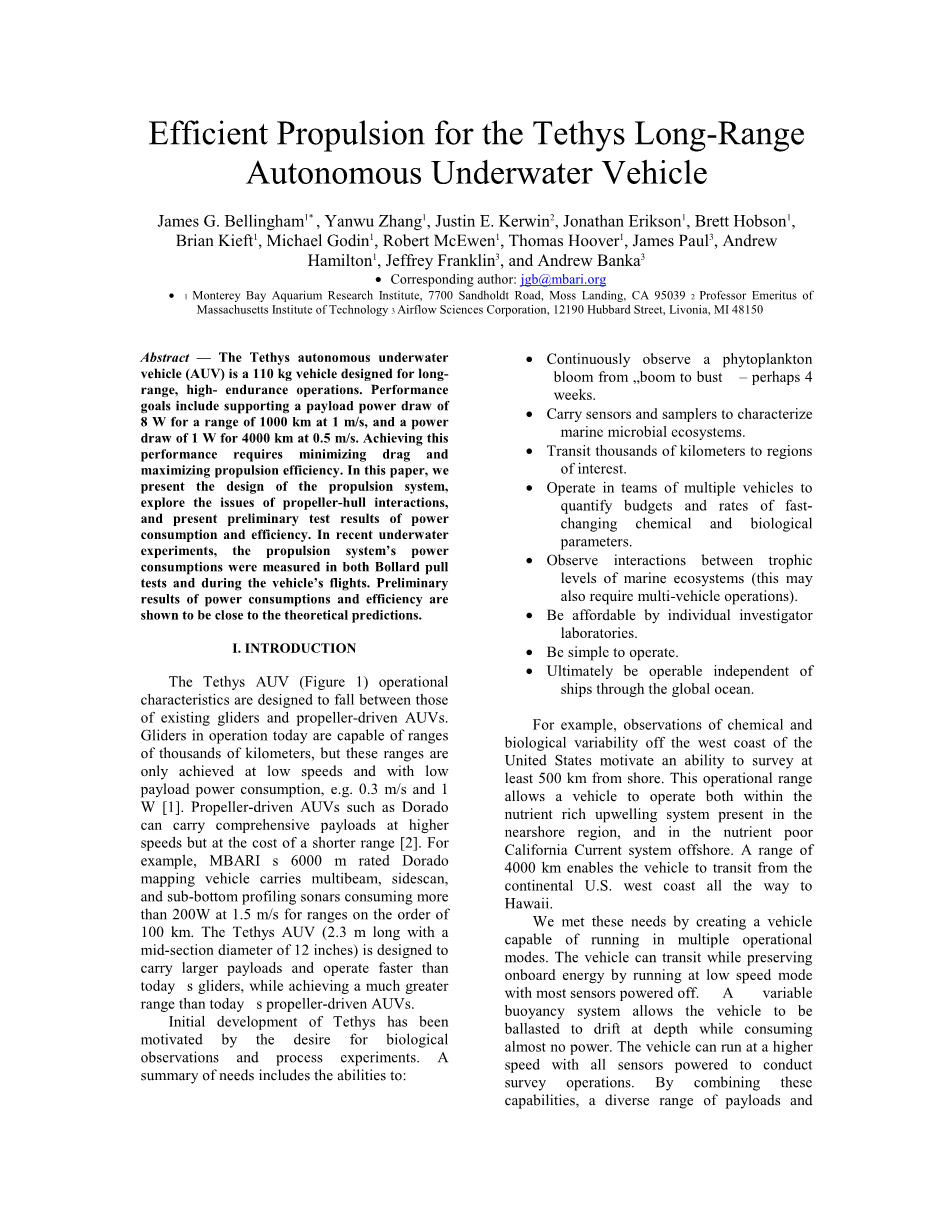
特提斯AUV(图1)下降的操作特点是设计的滑翔机和螺旋桨驱动的水下航行器。现在的滑翔机可操作的范围有数千公里,但这些范围只能在低转速和低有效负载功率消耗下实现,例如0.3m/s和1w。螺旋桨驱动的水下机器人如剑鱼可以在较高载荷和高速下进行移动,但只能在较短的范围内。例如,MBARI6000米多拉多绘图航行器,搭载多波束侧扫, 和浅地层剖面声纳消耗超过200W,速度为1.5m/s,大概在100km的范围内。特提斯AUV(2.3米长,中节直径12英寸)的设计比起今天要进行更大的有效载荷和运行速度的水下航行器,同时实现比现在更大的范围的螺旋桨驱动的水下航行器。特提斯最初的想法是出于对生物的观察和处理实验。总结其包括的能力:
bull;观察浮游植物的生老病死-大概4周
bull;使用传感器和采样的海洋微生物生态系统
bull;向地区运送数千公里感兴趣的。
bull;多个航行器的团队进行量化预算和快速改变化学与生物参数。
bull;观察不同营养水平之间对海洋生态系统的作用(这可能还要求多航行器作业)
bull;负担得起的个人调查实验室。
bull;操作简单。
bull;最终可操作并独立穿越全球的海洋。
例如,对美国西海岸的化学和生物变异的观察,拥有至少从岸上500公里调查能力。这个工作范围内,允许航行器运行在营养丰富的上升流系统在近岸区域内,在贫营养加利福尼亚当前的海洋系统。4000公里的范围,使航行器能航行在美国西海岸到夏威夷的所有路线。
我们满足了这些需求,通过建立一个能够运行在多个运行模式的航行器。该航行器可以运输,同时保持能量,通过运行在低速模式给大多数传感器供电。可变浮力系统能使航行器轻易下潜而几乎没有消费任何能量。航行器可以用更高的速度运行所有的传感器,以进行调查操作。通过结合这些功能,可以进行不同的有效载荷和任务。
图一:特提斯AUV悬挂在MBARI试验箱。航行器的左橙色部分是有效载荷量。黄色的中心部分是主要的压力容器壳体的电子和电池。右边是推进和控制部分,其中还包括一个天线(橙色肥大)使用铱系统、GPS、无线通讯。
例子,一个任务可能包括以下几个:a)一个缓慢的,低功率运行距海岸500公里,b)漂移模式等待,直到任务发生,与岸上一天一次的卫星通信,c)进行的事件检测,使用高速模式映射出当地的变化,d)最终,低速返回到岸上。相反的一个简单的任务可能是简单地运行海上500km,并进行高速运行,以获得一段水柱特性。然而,三分之一的任务可能涉及到一个高功率负载间歇性,交替的长,低速运行的短,高功率的观测活动。 这些一般需要经营理念,我们提炼了一套设计要求,这是:车辆的重量为100kg,在0.75m/s的8w的总负荷,0.35m/s,3000的范围内最小的有效载荷图,以中性浮力和漂浮的能力。在设计过程中所描述的,它变得更清晰,更大的性能是可能的,在高和低的速度,调整到1和0.5米/秒,分别和较低的范围目标增加到4000km。
A航行器的大小:运行范围,速度和总负载
一个水下航行器的运行范围取决于车辆的大小,速度和总负载,总负载被定义为非推进系统的功率消耗。一个有代表性的初始载荷识别的航行器设计过程中的关键,因为这是允许的总负载。对于我们的第一个有效载荷,我们选择传感器的温度,盐度,溶解氧,光学后向散射,荧光,硝酸盐,和水的速度。通过一个合理的循环操作,我们估计负载8W,是可以实现的。
要确定的最大范围,我们开始描述的总功率作为速度的函数:
总功率的绘制是这样的总和,推进功率和总负载。总的负载是简单的功率消耗的所有子系统以外的推进负载。推进器功率是一个函数的阻力系数的航行器,,该区域的航行器,一个密度的水,车辆的速度v,和效率的推进系统。对于下面的计算,我们假设推进效率和航行器阻力是独立的速度。
通过最大限度地减少每单位距离的功率消耗,可以得到最佳的车辆速度和最大范围:
和
在这里指的是储存在板载电池中的能量。
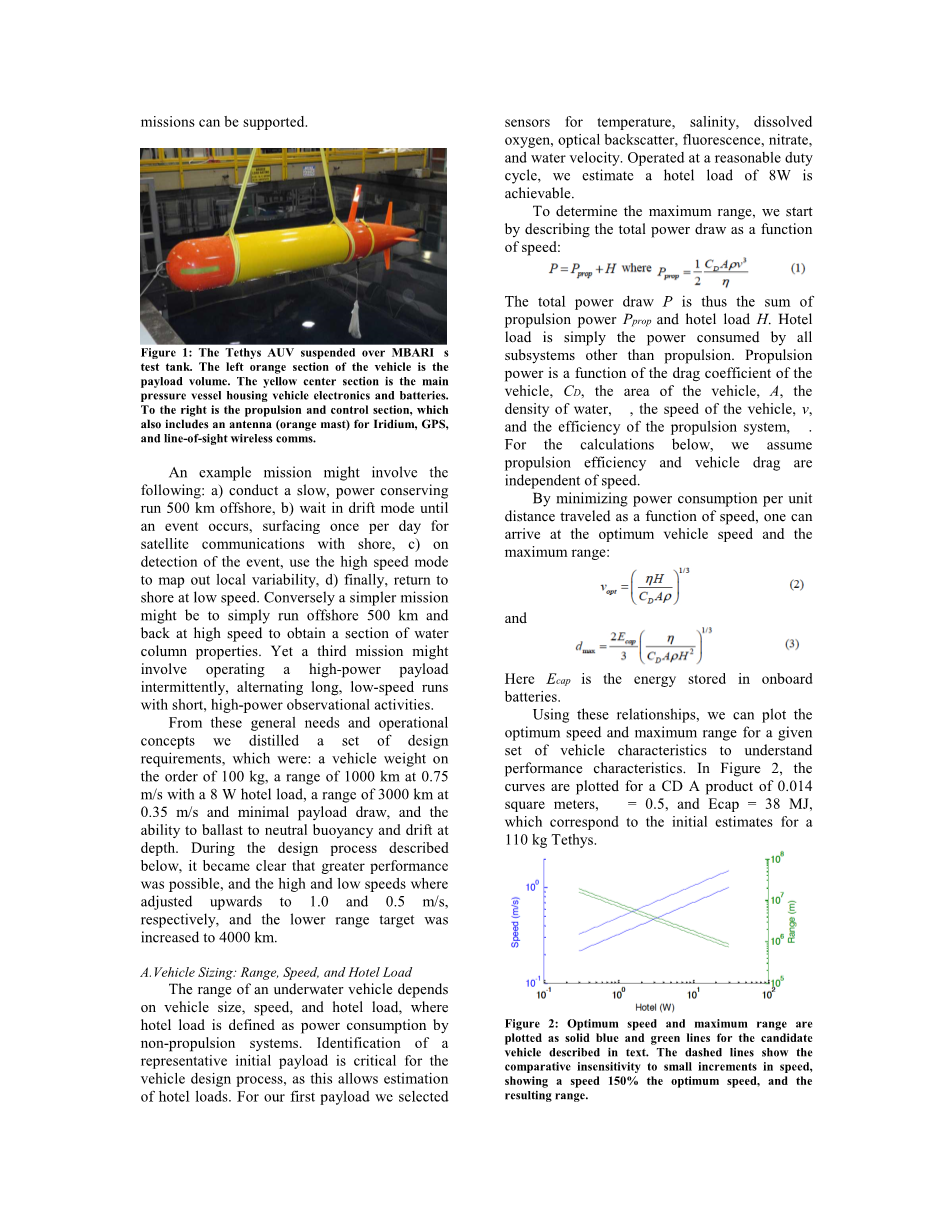
利用这些关系,我们可以绘制一组给定的航行器特性图,了解性能特点的最佳速度和最大范围。在图2中,曲线绘制了一个0.014平方米的产品,=0.5,=38MJ,对应于一个110公斤的特提斯的初步估计。
图2:最佳的速度和最大范围被绘制为在文本中描述的候选航行器的固体蓝色和绿色线。虚线显示速度的比较不敏感,以小的速度递增,呈现出速度150%的最佳速度,以及由此产生的范围。
B螺旋桨与浮力驱动推进
鉴于延长耐力的要求,和优越的性能范围特征的现在的滑翔机,一个明显的问题是:为什么使用螺旋桨推进?为什么不建造一个更强大的滑翔机或混合动力系统,使用螺旋桨和浮力驱动的推进?于是决定将重点放在推进器驱动系统的推进,主要是确定这样的推进系统可以提供有效的推进跨越所需的速度范围,从而确定了第二模式的推进是不必要的。利用浮力作为唯一的推进系统实体现灵活性和大小的原因。第一个问题是围绕浮力驱动系统的需要,以飞行球型垂直剖面,或者,几乎无约束的螺旋桨驱动系统的垂直飞行剖面。大小问题围绕着推进力的二次增长速度。在浮力驱动的系统中,驱动力是由体积变化产生的,因此四倍的体积变化是必需的。在一个较大的部分的航行器必须使用的推进系统,这反过来又降低了电池和/或有效载荷能力,并驱动航行器的大小。
2方法:最大限度地减少推进功率消耗
航行器性能的优化是余以最大限度地减少电力消耗的推进紧密联系在一起的。为特提斯车辆的设计,开始进行低阻力航行器设计。使用流体动力学(计算流体力学)建模,基本的机体被确定,这反过来又允许优化的螺旋桨设计。采用高性能电机和传动系统的设计,完成了系统的设计。下面描述的过程的细节。
A减少阻力
通过采用三维粘性流体力学模型,我们设计了一个低阻力机体。在机体的设计是为了要适应多种有效载荷的一个可扩展的航行器,因此,选择平行中间体的设计。假设一个简单的航行器拖曳模型(只使用正面的阻力系数和表面)有一个半球形的鼻子,平行体,和110kg的排水量,最小阻力系数是在一个12英寸的中截面直径(0.3米)的发现。这个维度被用来限制潜在的流动和计算流体力学。
特提斯的阻力由摩擦力,这与AUV的表面积有关,形成阻力,这是一个机器人的形状函数。阻力最小化的重点是减少的形式阻力。若要达到最小阻力,加快身体的前部的流动必须遵循的尾部轮廓和填充它减速的AUV尾迹区。如果流减速太快或身体曲线的幅度太大,流量会从机器部分而不是它的形状“分离”。在这种情况下,对水下航行器尾部的其余部分会减少压力。结果将是额外的阻力。
流动的能力指的是“转向”和后续的身体轮廓与附近的身体表面的流动的动能。由于动能会随着水流减速下降,尾部形状是这样选择的,曲率变化从在体尾交界处的一个有限值为零在尾尖。通过身体的直径和尾巴的长度,然后用来定义的系数,得到的机体形状函数。势流分析随着斯特拉特福德边界层分离标准验证,流量仍然附着在机体的长度在1m/s和0.5m/s的速度。
图3。流线和表面压力分布在1m/s,30节。俯仰角的效果可以在流动的流线和压力分布的角度看。压力上升到尾部,指示压力恢复,有助于减少阻力。
接下来,CFD分析来评估周围的流场,特提斯AUV向前的速度为0度和3度的俯仰角度。沥青是用来改变机器人的垂直位置,所以它是确保阻力仍然较低,在这些温和的角度很重要。商业计算流体力学程序的程序是用来模拟这些流场和确定的阻力,升力和俯仰力矩系数,用于动态性能评价。从1m/s的结果,3O间距情况如图3所示。计算结果也为螺旋桨设计过程提供了输入(下面描述)。后来的模拟包括螺旋桨推力的影响对整体流场和AUV拖曳,如图4所示。
图4。推进器的推力改变了附近的流动,缩小了尾流。
我们设计了两个单螺旋桨:1m/s和0.5m/s的2个螺旋桨,直径有10英寸(0.25米),每分钟旋转300次(RPM)和150的转速为1米/秒和0.5米/秒的速度。航行器性能目标要求的螺旋桨效率不低于0.8,这构成了挑战,在设计螺旋桨的推力是必需的,以抵消预期的阻力(包括由于表面粗糙度产生的控制面和增加的阻力,)在两个航行器的速度下。
重要的是要获得的螺旋桨的尾流配置,以优化螺旋桨设计。使用三维计算流体力学软件在适当的边界层表示的情况下,计算出的螺旋桨(即,名义唤醒)的情况下的唤醒配置文件。然而,随着螺旋桨的存在,通过螺旋桨飞机的流收缩和加速,从而改变了尾流剖面。麻省理工的推进器升力线(PLL)程序[ 3 ]作为名义上的尾流轮廓计算修改后的尾流轮廓(称为有效唤醒剖面)以及诱导速度的螺旋桨,其金额给总速度场。请注意,在2个车辆速度的唤醒配置是不同的,增加了另一个挑战的螺旋桨设计。通过运行的锁相环程序,我们产生了一个初步的叶片设计,满足推力和效率要求。
在参数研究完成后,使用锁相环理论,下一步是最终的叶片设计制造。这是使用一个耦合的欧拉/升力面代码最初是在麻省理工学院[4-5]进行。本程序将提升线的结果以以下方式扩展:
bull;在水动力溶液中的特提斯AUV
bull;直接计算的对流的身体边界层涡造成的螺旋桨引起的流量,而不是估计它。
bull;表示螺旋桨叶片的升力面,而不是提升线。
bull;分析了不同工作条件下的设计几何形状,具体为1m/s和0.5m/s的工作点。
bull;介绍了雷诺兹数(这是不同的双工作条件)对叶片部分粘性阻力和减少的计算结果的基础上,从一个二维翼型边界层代码获得的一系列的结果的影响。
bull;直接使用相同的详细的叶片表面的几何形状,用于制造的水动力计算,可直接用于制造。
图5显示了机体边界层是如何引入计算的。曲线上的“目标尾流”是边界层的位置的螺旋桨(但目前没有螺旋桨)作为计算流体力学代码。曲线标记的“新的流入”是计算的流入剖面几个推进器半径上游,结果在一个速度在螺旋桨匹配指定的配置文件。这是通过引入入口损失迭代的欧拉求解器,直到实现一个匹配。这些入口损失,然后目前用在耦合计算的螺旋桨。相同的程序被用于0.5m/s的操作条件。
图6显示了计算截面的阻力系数,作为一个函数的刀片跨度为双工作条件。它表明,阻力系数是高的局部截面雷诺兹数是非常低的内半径。为了获得最佳效率,它是必不可少的,以保持叶片面积和尽可能低的叶片数。保持叶片的厚度的厚度的绝对最小,它也是必要的。大型船用螺旋桨的应力限制在最内层的半径和需要厚的部分。但在特提斯AUV的规模与实力,这是不是一个使部分可以更薄的因素。此外,在这个低雷诺兹数的最佳截面形状还有一个相对厚的后缘。
图5。螺旋桨流入剖面及尾
图6。螺旋桨的截面粘性阻力系数。
图7显示了一个刀片的几何形状。我们用SolidWorks软件生成的固体形状,然后生成STL文件是由熔融沉积造型机(FDM)建立一个坚实的塑料零件,成为一个硅胶模式。一种玻璃纤维填充的聚氨酯,然后用于铸造一个工作的一部分。
图7。螺旋桨叶片几何形状。
C.电机的选择
驱动电机,驱动列车,和螺旋桨在特提斯都必须接近最大效率在低速和高速模式。实现这个倍增的转速和扭矩是一个挑战。例如,在0.5m/s,特提斯低速运行需要2 N的推力,可只有0.07Nm的电机扭矩的产生。在这些低转速和力矩,该系统是特别敏感的寄生摩擦和损失。
大多数水下机器人驱动电机,包括MBARI剑鱼,使用电机与齿轮减速电机的允许运行在更高的速度在电机效率更高,并在较低的速度在螺旋桨螺旋桨转动效率更高。在压力补偿油中,电机和齿轮箱通常都是充满压力的,所以在动轴密封件上没有大的压力差。使用这种设计的特提斯是自由运行的摩擦扭矩的齿轮马达的磨合油密封很容易超过所需的驱动车辆的扭矩的问题,导致非常低的推进效率。而差异需要进一步分析比较,这给了我们信心进行全尺寸的特提斯的结构设计。图8。计算流体力学计算的阻力和测量阻力的比较。
3.测试结果
A船体阻力的验证
为了验证CFD计算的阻力,我们创建了一个机形的一半规模的模型和测量MBARI测试箱拖动(长15米,宽10米,深10米,注满海水)。考虑到在缸的长度较短,我们设计了一个两台组成的滑轮和芳纶线牵引模型以不同的速度。使用该钻机,我们可以保持模型的直线行驶,加速到所需的速度并维持所需的速度,最终停止在之前,它与缸相反的侧面相撞。
牵引速度由一个被放置在光电编码器轴上的主轴测量。牵引力由一个负载系统测量。考虑到在滑轮和导轨的摩擦损失以及字符串在字符串的水阻力损失,“字符串”测试运行的稳态摩擦损失项,然后减去从模型试验中测得的阻力。将所得的数据点,然后绘制作为阻力的函数的速度,并与计算流体力学相比,如图8所示。注意在半模型的阻力测量已转换的全尺寸模型。测得的阻力似乎是低于计算流体力学计算。注意,半模型试验为全尺寸船体近似。而差异需要进一步分析比较,这给了我们信心进行全尺寸的特提斯的车辆结构。
图8。计算流体力学计算的阻力和测量阻力的比较。
B.静态推力试验(即系柱拉力测试)
安装2片螺旋桨在全尺寸的航行器后,我们进行了拖力试验在MBARI测试箱验证由螺旋桨提供推力。如表所示,测量柱拉力在14%的预测在两个工作点由麻省理工学院的螺旋桨设计代码(150转和300转)。
表一柱拉力比较
C初步
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[148242],资料为PDF文档或Word文档,PDF文档可免费转换为Word

