英语原文共 9 页
改进负荷分配条件和减少传动误差的单级行星轮系设计
摘要
作者提出一种减少传动误差、局部轴承接触和改善了行星齿轮之间载荷分配条件的单级行星齿轮传动系统的设计方法。行星齿轮系是一个多体刚性机构的机械系统。
1.该方法的基础是:
(1)对齿轮齿面进行几何修正;
(2)对接触齿面间隙进行最小化和均衡。
2.几何修改是由以下来完成:
(1)通过行星齿轮的双重凸度
(2)通过为太阳齿轮和齿圈使用相同方向的螺旋渐开线表面。
3.所提出的几何结构:
(1)按照预先设计传动误差的抛物线函数,以减少噪音和振动;
(2)一种简单的调整和均衡轮齿之间齿隙的方法。
一.引言
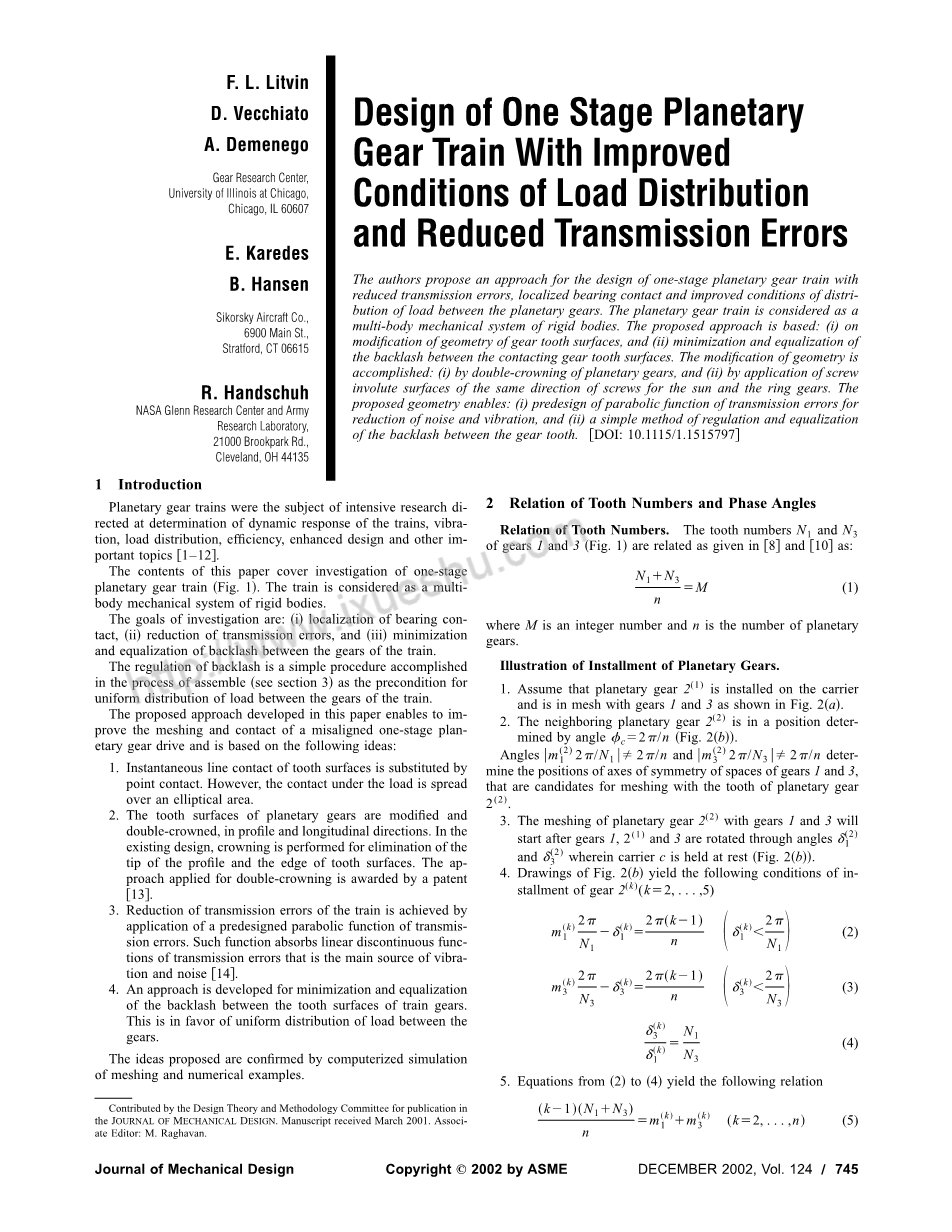
行星齿轮传动系是研究列车动态响应、振动、载荷分布、效率、强化设计等重要课题的热点。本文的研究内容包括单级行星齿轮系的研究(如图1所示),认为该传动系统是一个多体的刚性机构力学系统。
研究的目的是:
- 轴承接触定位
2. 减少传动错误
3. 列车齿轮间齿隙的最小化和均衡
齿隙调节作为列车齿轮间载荷均匀分配的前提条件,是装配过程中完成的一个简单步骤(见第3章)。
本文提出的方法可以改善单级行星齿轮传动的啮合和接触不良,其基本思路如下:
- 齿面瞬时线接触用点接触代替。载荷作用下的接触面分布在一个椭圆区域。
2. 行星齿轮的齿面在齿廓和纵向上进行了改进,并且改为双凸形。在现有的设计中,进行了凸面加工消除齿廓尖端和齿面边缘。双冠法是由一项专利授予的。
3. 应用预先设计的传动误差抛物线函数,可以减小列车的传动误差。该函数吸收传输误差的线性不连续函数,这是振动和噪声的主要来源。
4. 提出了一种减小和均衡列车齿轮齿面间隙的方法,有利于齿轮间载荷的均匀分布。
通过对齿轮系啮合状态计算机模拟和数值算例,证实了本文提出的思路。并改进负荷分配条件和减少传动误差的单级行星轮系。
二.行星齿数与相位角的关系
行星齿数关系
齿轮1的齿数为,齿轮3的齿数为(图1)。
关系式如下:
(1)
其中M为整数,n为行星齿轮数。
行星齿轮安装说明
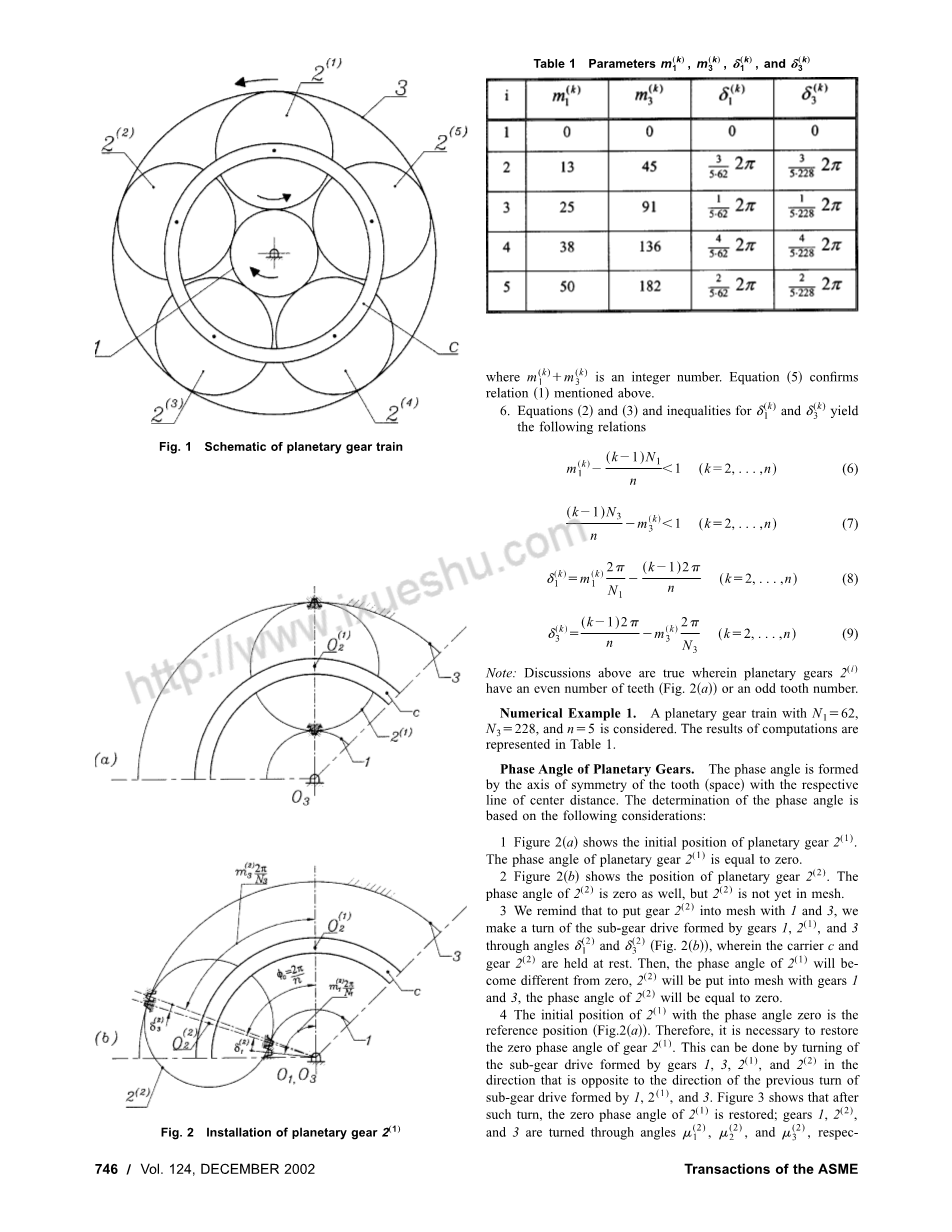
- 假设行星齿轮安装在托架上与齿轮1、3啮合,如图2(a)所示。
2. 相邻行星齿轮的位置由角度 由图2(b)确定。
角度 与角度 确定与行星齿轮与齿轮1、3啮合的对称轴位置。
- 行星齿轮与齿轮1和3的啮合将在齿轮1,和3通过角和旋转后开始,其中托架C保持静止(图2(b))。
4. 图2(b)给出了齿轮安装的下列条件
(2)
(3)
(4)
- 方程(2)与方程(4)连理形成以下关系
(5)
其中是整数。方程(5)确认关系(1)。
- 方程(2)与方程(3)连理形成以下关系
(k=2,...,n) (6)
(k=2,...,n) (7)
(k=2,...,n) (8)
(k=2,...,n) (9)
注:上述讨论是正确的,其中行星齿轮的齿数为偶数或奇数齿(图2)。
示例1
考虑带有、和n=5的行星齿轮系。计算结果如表1所示。
行星齿轮的相位角
相位角是由齿的对称轴与各自的中心距线形成的。相角的确定是基于以下考虑:
- 图2(a)显示行星齿轮的初始位置。行星齿轮的相位角等于零。
- 图2(b)显示行星齿轮的位置。 行星齿轮的相位角也为零。
- 需要提醒的是,为了使与1和3啮合,我们通过角度和(图2(b))转动由1、和3组成的副齿轮驱动装置,其中托架C和齿轮保持静止。然后,的相角与零不同,与1、3啮合,的相角等于零。
- 相位角为零的的初始位置为参考位置(图2(a))。因此,需要恢复齿轮的零相位角。这可以通过将齿轮1、3、和形成的副齿轮驱动朝与前一次齿轮驱动1、和3形成的方向相反的方向转动来实现。图3显示,在该转向后,的零相位角恢复;齿轮1、和3分别通过角度、和转动。角度、和表示齿隙各轴的偏差。齿轮1、和3与中心距对称。
- 上述讨论可以确定齿轮1和行星齿轮(k=2,...,5)的相位角。例如,图4表示扩大比例,即1号齿轮空间的方向在1号齿轮空间的区域内,由数字1和(k=2,...,5)标识。式中由式(2)确定。齿轮1的相位角由与相邻的线和齿轮1的空间数(-1)形成。相位角是从中心距顺时针方向测量的,即齿轮1的旋转方向,其中载体保持静止(图1)。
由图4可以确定相角
(k=2,...,n) (10)
使用示例1中的输入数据,我们得到
;;;
相位角的概念用于计算传动误差。
图1 行星齿轮系示意图
表1 参数
图2 行星齿轮的安装
图3 齿轮2、、3相对于中心距的齿向“空间对称轴示意图
图4 相角的推导
- 齿轮齿形的修正
现有的负荷分配条件和减少传动误差的单级行星轮系设计传动基本采用渐开线齿轮。
提出的新方法是基于以下牙齿几何结构的修改:
- 行星齿轮是双冠的,提供了一个预先设计的传输误差抛物线函数和局部轴承接触。
- 螺旋渐开线小螺旋角的齿面适用于太阳齿轮和齿圈。
改进几何结构的齿面相互作用使齿隙最小化和均衡,从而改善所有行星齿轮之间的负载分配。
行星齿轮几何结构的修改
此设计方案修改基于以下思路:
- 通过使用抛物线轮廓的齿条式切割进行齿廓凸度加工,而不是具有直线轮廓的齿条切割,如图(5(a))所示。纵向凸度是通过压入生成工具获得的(见下文)。
坐标系和与向量方程表示的中的抛物线齿条刀具刚性连接。
(11)
这里:(,)是表面参数(是沿着坐标轴测量的);是抛物线系数。
行星齿轮的生成示意图如图5(b)所示。坐标系与行星齿轮刚性连接;为固定坐标系;和表示齿条和齿轮的平移和旋转运动。
行星齿轮的齿廓凸面由以下方程式确定:
(12)
(13)
这里:矩阵和描述坐标变换;向量函数在中表示曲面的族;公式(13)是啮合方程。方程式(12),(13)以三参数形式确定表面(行星齿轮齿廓凸面。
行星齿轮表面的纵向凸面是通过如图6所示的一个产生盘的插入来实现的。圆盘的轴向轮廓与表面的横向轮廓一致。行星齿轮的纵向凸面由方程式确定。
(14)
(15)
这里:矢量函数代表生成盘的表面;和分别代表盘的平移运动及其倾斜度(图6)。图7说明了直齿轮的双凸面齿面。
图5 齿廓凸形行星齿轮生成示意图: (a)齿条的抛物线齿廓
(b)生成示意图
图6 行星齿轮纵向凸度示意图
图7双冠直齿轮示意图
齿轮1和3的齿面和
的齿面是外啮合常规螺杆渐开线表面,齿面为内啮合常规螺杆渐开线面。两个齿轮1和3的螺钉方向和螺旋角相同。
齿面相互作用
齿轮1, (i=1,...,5),3能够减少图8所示的齿隙。由于制造和安装错误,齿轮1和3的齿面与 (i=1,...,5)每个行星齿轮之间的齿隙大小不同。反冲或干扰的主要来源是行星齿轮在托架上的角度安装误差。
图8(a)显示调节前的齿隙。图8(b)显示通过行星齿轮的轴向位移消除齿隙。所述轴向位移调节必须针对机组(i=1,...,5)的每个行星齿轮完成。
在装配过程中,可以通过每个行星齿轮的适当轴向位移来调节齿隙,并且只需要对所获得的齿背进行测试。
四.TCA在确定传动误差和轴承接触中的应用
TCA(齿轮接触分析)是为模拟齿轮传动不对准的齿轮齿面啮合和接触而设计的。本文给出了两种TCA算法:
- 对于带有两个齿轮的传统齿轮传动。
- 对于行星齿轮传动。
传统齿轮传动
在固定坐标系中考虑了曲面的相切性。TCA算法通过以下矢量方程表示接触面和连续相切的条件。
(16)
(17)
这里:(,)是曲面参数;是齿轮i (i=1,2)的旋转角度是曲面的位置矢量在固定坐标系中;是曲面法向单位在坐标系中。
矢量方程(16)还有(17)产生五个独立的标量方程,表示为
(i=1,...,5) (18)
注意矢量方程(17)仅提供两个独立的标量方程,因为。
方程组(18)的应用。对于TCA,是一个迭代过程,其执行如下:
(1)假设有一组参数
(19)
满足方程组(18)。
- 其中一个未知数,如,被选作输入参数,并观察到处的以下不等式。
然后,根据隐函数系统存在性定理,方程组(18)可以用函数在附近求解。
(21)
应用上述迭代过程,对于面积,可以确定函数(21)整个啮合循环。
使用传输函数,可以将传输错误的函数确定为
(22)
表面上的接触路径确定为
(23)
其中是表示在坐标系中的矢量函数。
行星齿轮系
应用TCA确定行星齿轮传动系统的传动误差是一个更复杂的问题,需要采取以下步骤:
步骤1:齿轮1、和3的齿面用固定坐标系表示。
步骤2:齿轮1和的旋转由三个参数、和决定。这里:是齿轮1的旋转角度,是行星齿轮相对于齿轮架c的旋转角度,是齿轮架的旋转角度。
步骤3:1、相切条件,齿轮和3提供了十个类似于等式的独立方程(18)。这些方程包含齿轮1、和3的八个表面参数,以及三个运动参数和。以为输入参数,由TCA计算机编程得到传动函数,进而确定行星齿轮传动不对中误差的函数。
将十个非线性方程组分别表示为五个方程组的两个子系统,然后应用迭代求解过程,可以简化其求解过程。
考虑到行星齿轮系是一个多刚体系统,应用TCA,我们可以在任何时刻确定五组行星齿轮中的哪一个与齿轮1和3啮合。
图8齿隙调节图示:(a)调节前1、3、2齿隙;(b)轴向位移消除齿隙
五.副齿轮传动传动误差的作用
考虑行星齿轮系的子齿轮传动,和(。子齿轮传动装置的旋转变换是在载体保持静止的情况下进行的。在副齿轮传动中应用TCA,可以确定传动误差和齿隙的函数。然后,通过调节使五个行星齿轮的齿隙最小化和均衡成为可能。
子齿轮传动的传动误差的结果函数确定为
(24)
其中是从TCA程序获得的。的近似解表示为
(25)
开发的TCA的另一个目标是分析通过调整行星齿轮的安装获得的传动误差(见下文)。
- 数值示例2
数值算例的目的是求出行星齿轮在载体上安装调整前后的传动误差函数。行星齿轮为双凸形,齿轮1和3的齿面为螺旋渐开面。齿轮的设计参数如表2、3和4所示。
传输错误是由以下原因引起的:
1:行星齿轮的双冠齿面与齿轮1和3的螺旋渐开线表面的相互作用。
2:行星齿轮在托架上的安装错误。
虽然行星齿轮的双重凸度会导致传动误差,但必须对其几何结构进行此类修改,原因有两个:
- 用于轴承接触的定位
- 提供传输误差的抛物线函数。
最危险的对准误差是行星齿轮在载体上的安装误差,这是所代表的数值例子中的研究课题。
在(图2)投影在垂直方向用和表示。对传输误差的影响可以忽略不计。为了减小传动误差,五个行星齿轮的安装误差和轴向位移如表5所示。齿轮被选作副齿轮驱动的参考齿轮,该齿轮的被选

