英语原文共 9 页
双电机耦合EV动力总成效率的研究
摘要:一种提出了速度和扭矩耦合的新型双电机动力耦合总成(DMCP)。在这个动力系统中,一个行星齿轮单元耦合两个电动机的转速,另一个定轴齿轮单元耦合电动机的扭矩。通过集成控制电动机、同步器和离合器,DMCP可以在四种模式下运行以满足不同运行条件的要求,从而提高能量利用效率。本文分析了DMCP在各种模式下的工作原理,并基于车辆纵向动力学理论优化了整体瞬时效率。此外,本文还阐述了DMCP的最优模式转换策略和功率分配策略,并在MATLAB/Simulink环境下开发了详细的双电机电动汽车(EV)模型。仿真结果表明,与普通单电机双速动力总成相比,DMCP可以有效提高电动汽车的能量利用效率,延长电动汽车的续航里程。
索引条款:行驶里程;双电动机;效率优化;电动汽车(EV)动力总成;模式转换;动力分配
- 介绍
近年来,节能环保电动汽车(EV)已成为研究热点[1],EV动力总成设计在实现节能环保方面发挥着重要作用。EV动力总成主要由电动机驱动系统、机械传动系统和其他部件组成。它将电能转换为牵引力以进行推进并在制动时捕获动能,将其转换为电能返回可充电储能系统(RESS)。因此,动力总成效率性能直接影响EV的行驶范围[2]。
手稿于2013年10月29日收到;2014年3月9日和2014年4月24日修订;2014年7月30日接收。出版日期2014年8月14日;当前版本的日期2015年6月16日。这项工作部分得到了中国国家高技术研究发展计划(863计划)的支持,授权范围为2011AA11A222,部分得到了重庆省自然科学基金项目cstcjjA60001的支持。D.Diplo先生协调了对该文件的审查。
M.Hu,J.Zeng和D.Qin,重庆大学机械传动国家重点实验室,重庆400044(电子邮件:hu_ming@cqu.edu.cn;afeng010@gmail.com;dtqin@cqu.edu.cn)。
S.Xu曾在机械传动国家重点实验室工作,重庆大学,重庆400044现工作于上海汽车工业责任有限公司(SAIC),上海200041(电子邮箱:xushaozhi@gmail.com)。
C.Fu在航空航天机械和制造学院工作工程学院,墨尔本皇家理工学院(RMIT),墨尔本,维多利亚州,3083,澳大利亚(电子邮件:s3298122@student.rmit.edu.au)。
本文中一个或多个图的彩色版本可在http://ieeexplore.ieee.org在线获得。
数字对象标符:10.1109/TVT.2014.2347349
现有的电动汽车动力系统主要有两种形式:独
立的多电动机驱动系统(轮内电动机动力系统)和集中式单电机驱动系统[3],[4]。轮内电动机动力总成可以简化传动系统的结构,但它对电动机转矩密度、电动机疲劳寿命以及轮毂和电动机的集成制造水平有更严格的要求。此外,很难克服控制复杂和安全性差的缺点[5]。另一方面,集中式单电机单速驱动器已被用于大多数现代电动汽车上。然而虽然它简化了动力总成的结构,并且相关的控制器能力通常过剩而无法有效使用,但它对电动机有苛刻的要求[6]。为解决上述缺点,提出了单电机采用双速变速箱动力系统。Ren et al.制定了一个模型来研究电动汽车动力传动系统的潜在优势,这可能是开发传输系统的另一种方法[7]。这个模型采用了齿轮传动装置。结果表明,不仅可以获得能量消耗减少方面的直接效益,而且电动机和传动系统尺寸的显着减少,然而,这种方案在实践中仍然很少使用,部分原因是比率变化机制以及换档的可控性和驾驶性能昂贵费用[8]。
在电机驱动和传动系统领域的极少数新突破以及对车辆经济性能,驾驶舒适性和安全性的日益增长的要求,需要开发具有出色扭矩和速度性能、宽效率运行区域、可靠性高的新型EV动力总成。
针对上述问题,本文提出了一种新型电动机耦合动力总成(DMCP)[9]。首先,介绍了DMCP在各种模式下的配置和工作原理,然后对其整体效率进行了定义和优化。然后,开发了该DMCP的控制策略。最后,开发了详细的EV模型,以正确评估和验证DMCP的优势。
2.配置和操作原则
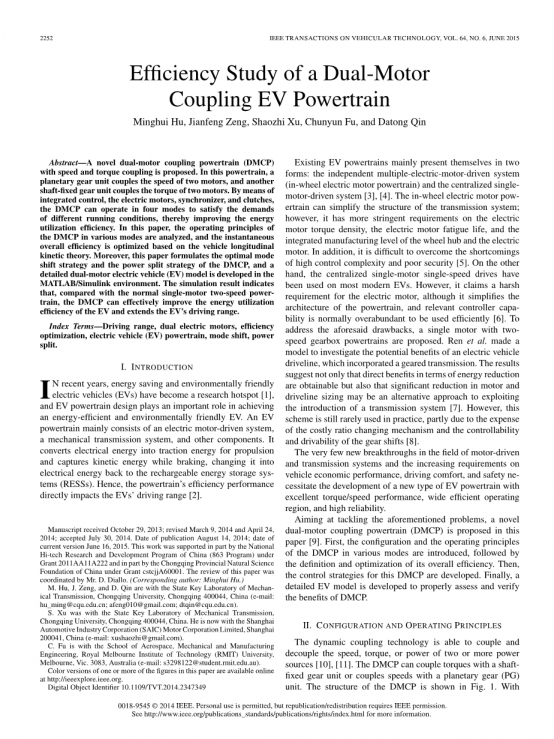
动态耦合技术能够耦合和分离两个或多个电源的速度、扭矩或功率[10],[11]。DMCP可以通过定轴齿轮单元耦合或者与行星齿轮(PG)单元扭矩耦合。DMCP的结构如图1所示。通过这种结构,可以通过改变各种模式和优化操作点来提高车辆的经济性能,但是不可靠性和更复杂的电机控制是不可避免的。
图1. DMCP的示意图
表I DMCP的动力系统规格
|
组成 |
参数 |
数值 |
|
M1 |
类型 |
PMSM |
|
额定/峰值功率(KW) |
18/35 |
|
|
额定/峰值功转速(rpm) |
3700/8000 |
|
|
额定/峰值转矩(Nm) |
45/90 |
|
|
M2 |
类型 |
PMSM |
|
额定/峰值功率(KW) |
20/40 |
|
|
额定/峰值功转速(rpm) |
2500/5500 |
|
|
额定/峰值转矩(Nm) |
75/150 |
|
|
PG |
比值(Zr/Zs) |
3.64 |
|
TCG |
比值 |
0.60 |
|
SCG |
比值 |
2.19 |
|
FD |
比值 |
2.92 |
在该动力系中,电动机1(M1)连接到PG的太阳齿轮,电动机2(M2)可以根据同步器(SY)套筒的位置连接到太阳齿轮或齿圈。DMCP的主要规格参见表I [12]。动力通过PG单元或轴固定齿轮单元连接,然后通过最终驱动器从托架输出到轴输出。采用动态耦合技术的动力系统不仅降低了对每个动力源的性能要求,还调节了动力源的工作点以减少动力损失。通过离合器的接合和分离以及如表II所示设置SY套筒的位置,DMCP可以在四种驱动模式下运行:单电机1驱动(SM1)、单电机2驱动(SM2)、双电机扭矩耦合驱动(TC)和双电机速度耦合驱动(SC)。
表二系统操作时间表
|
模式 |
电动机1 |
电动机2 |
同步器套筒 |
离合器1 |
离合器2 |
|
单电机1驱动 |
○ |
□ |
○ |
||
|
单电机2驱动 |
○ |
→ |
○ |
||
|
双电机扭矩耦合驱动 |
larr; |
○ |
|||
|
双电机速度耦合驱动 |
→ |
○ |
○ |
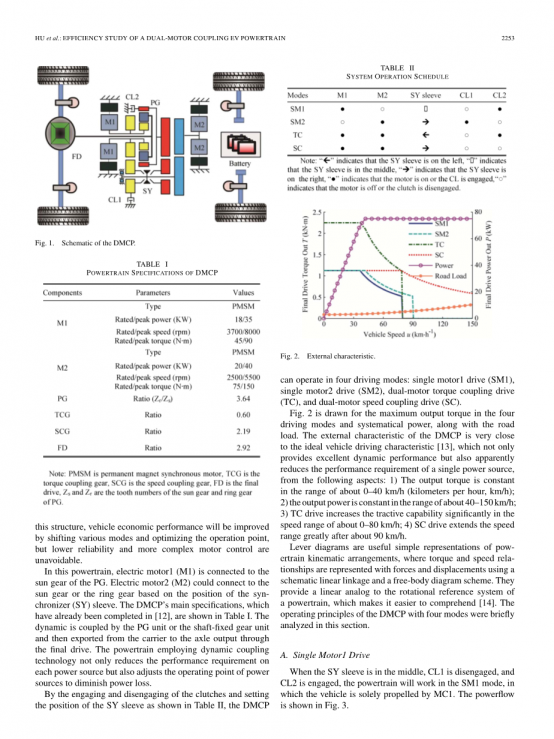
图2.外部特征
图2绘制了四种驱动模式下的最大输出扭矩和系统功率。DMCP的外部特性非常接近理想的车辆驱动特性[13],它不仅提供了出色的动态性能,而且还明显降低了单个电源的性能要求。从以下几个方面:1)在约0-40公里/小时的范围内输出转矩是恒定;2)在约40-150公里/小时的范围内输出功率恒定;3)在约0-80公里/小时的速度范围内TC驱动显着增加牵引能力;4)SC驱动器在大约90km/h后大大延长了速度范围。
杠杆图简单明了的表示动力总成运动学布置,其中扭矩和速度关系用力和位移表示,使用示意性线性连杆和自由体图方案。它们为动力传动系统的旋转参考系提供线性模拟,使其更易于理解[14]。本节简要分析了具有四种模式的DMCP的工作原理。
- 单电机1驱动
当SY套筒处于中间位置时,CL1脱离接合,CL2接合,动力传动系统将以SM1模式工作,其中车辆仅由MC1推进。电源流程如图3所示:
图3. SM1驱动电源
图4. SM2驱动电源
图5. TC驱动器功率流
SM1模式下的DMCP动态模型如下
(1)
其中是总惯性力矩,是MC1有理惯性,表示轮速,表示MC1速度,k是PG比率Zr/Zs,是最终传动齿轮比,是MC1扭矩,是车轴所需的总扭矩,代表PG传动效率,是最终传动效率。
- 单电机2驱动
同样,当SY套管位于右侧时,CL1接合,CL2脱离,动力传动系统工作在SM2模式,车辆仅由MC2驱动。此模式下的动力流程如图4所示。
SM2模式下的DMCP动态模型如下:
(2)
其中是MC2转动惯量,是MC2转速,是转速耦合齿轮比。
- 双电机扭矩耦合驱动
当SY套筒设置在左侧时,CL1脱离,CL2接合,动力传动系统工作在TC模式。在这种模式下,与其他三种模式相比,轴固定齿轮单元用于耦合两个电机的扭矩以输出更大的牵引力。图5显示了该模式下的功率流。TC模式下的DMCP动态模型由以下等式控制[13]:
(3)
其中是TCG比率
从给定的方程可以看出,M2的速度是M1的倍,太阳齿轮的可用最大速度是min(,),其中和分别是最大值。M1和M2的速度。此外,两个电动机的转矩可以自由地与约束相结合。
- 双电机速度耦合驱动器
当SY套管位于右侧时,CL1接合,CL2脱离,动力传动系统将在SC模式下工作,由于SCG的速度耦合,其速度明显高于其他三种模式输出速度。图6显示了该模式下的功率流。
SC模式下的DMCP动态模型如下[15]
(4)
其中是M1可以以的速度输出的最大转矩,是M2可以以的速度输出的最大转矩。
应当注意,M2的扭矩是M1的扭矩的倍,并且载体的扭矩是。
3.效率优化
由于DMCP中有两个电机,因此整体效率直接受两个电机之间功率分配的影响。在这里,通过综合考虑电池、电动机和变速器的效率,优化整体效率以尽可能地扩展EV高效的范围[16]。
行驶阻力Fr由滚动阻力、空气阻力、加速度阻力和坡道阻力[17],所有这些都可以通过以下公式计算:
其中m是车辆的总质量;g是加速度引力;f是滚动阻力系数;alpha;表示坡度角;是气动阻力系数;A是迎风面积;是以每小时公里数表示的车速;u是以米/秒为单位的车速;,,和分别表示SM1,SM2,TC和SC模式下双电机耦合DMEV的旋转质量转换因子;r是轮胎半径。
系统的输出功率和输入功率:
总体效率定义为:
总效率取决于车辆速度,加速度,电池效率,电动机效率和车辆尺寸。在这些因素中,车辆尺寸是恒定的,而车辆速度,车辆加速度和电池充电状态(SOC)随着道路负荷,驾驶员的需求和电池运行状态而变化。
在SM1和SM2模式中,电机工作点完全由目标车速和目标加速度决定。在TC模式中,两个电机转速是成比例的,并且扭矩可以在约束内任意组合,而

