英语原文共 7 页,剩余内容已隐藏,支付完成后下载完整资料
基于几何代数的腕部偏置机器人6R机械臂逆运动学解
在本文中,我们提出了一种基于几何代数的有效方法,用于计算手腕偏置的6R机器人机械手的逆运动学问题(IKP)的解。由于在用数学方式表示的这些机器人操纵器的运动学方程是复杂的,高度非线性的,耦合的和多重解时,存在解决逆运动学问题的困难,因此我们将几何代数理论应用到运动学建模中。 6R机器人操纵器可以简单地生成闭合运动学方程,使用符号消除技术将该问题重新构造为广义特征值问题,然后得出16个解。最后,以符合机器人操纵器类型的喷涂机器人为例,说明了该方法的有效性和实时性。实验结果表明,该方法在几何直觉,计算和实时性上比传统方法具有很大的优势,可以直接扩展到所有串行机器人操纵器上并完全自动化,为机器人的分析和应用提供了新的工具——通用机械手。
1.引言
6R机械手的逆运动学问题的操作是根据给定末端执行器相对于基座的位置和方向以及所有链接参数的值来确定关节值,这已被认为是机器人工作区分析,轨迹规划中一个更重要的问题,运动控制和离线编程[1]。对于具有偏置腕部的6R机器人操纵器,它需要处理从笛卡尔空间到关节空间的高度非线性映射,计算从运动学方程式中获得的一组多项式的解,并为操纵器产生多个姿势。但是,这种类型的机器人操纵器在实际应用中拥有特殊的几何结构,因此无法为IKP提供封闭形式的解决方案。因此,应提供有效的数值方法来求解此类机器人操纵器的IKP。
一般的6R机器人操纵器的运动学问题通过旋转关节半角切线中的16度多项式方程式得以完全解决。 针对末端执行器的给定位置,开发了一种算法来计算运动链所有可能配置的所需关节角度。 具有最多16种不同配置的机器人的示例显示,对于一般的6R机器人操纵器,多项式次数16是最低的。
当运动学方程是复杂的,高度非线性的,耦合的并且具有多个解[2]时,在解决IKP时遇到任何困难的情况下,许多研究人员尝试根据机械师和数学家介绍的各种方法有效地解决IKP。 Raghavan和Roth [3]使用渗析消除将IKP减少到一个未知数的16多项式,并找到了所有可能的解决方案,Manocha和Canny [4]将这个问题表述为特征值问题,并提高了整体的稳定性和准确性。算法。 Aspragathos等。 [5]比较了三种方法,即均质变换矩阵,李代数和螺旋理论,用于计算机器人的运动时间和存储需求,后两种方法的成本效益更高,因为机器人自由度数增加。 Husty等。 [6]利用经典的多维几何来构造IKP,并在消除过程之前使用几何信息。然后,6R链在中间断裂,形成两条开放的3R链,因此他们获得了16个溶液。乔等。 [7]将4times;times;4齐次矩阵转换为双四元数的形式,并得出了双运动学方程。然后,通过线性代数和Dixion结果消除,从结果矩阵中获得16个解。另外,已经给出了其他方法的详细描述[8-12]。但是,随着机器人自由度的增加,这种方法存在矩阵计算复杂,计算成本高以及奇异性高的问题,并且可能无法保证对实时性和位置精度的要求。
针对常规方法的缺点,已进行了一些尝试来应用几何代数来解决机器人操纵器的IKP。威廉·克利福德(William Clifford)提出的几何代数[13,14]将向量,四元数,黎曼代数,李代数,复数,螺旋等代数系统放入许多数学系统的统一框架中,从而避免了不同数学之间的复杂转换。关于相同问题的代数语言。此外,它可以直接计算几何元素,具有直观的几何含义,简单的符号表示,坐标独立性,多维空间计算等特点,并为表示基本实体和欧氏空间的变换提供了方便的数学符号。几何代数的这些强大优势使其在机器人技术中非常受欢迎,并吸引了许多优秀的研究人员。 Zamora和Bayro-Corrochano [15]首先将几何代数应用于视觉引导的机器人,并计算了机械臂的逆运动学,以解决视觉引导的抓握问题,这证明了几何代数解决IKP的能力和简单性。希尔登布兰德[16]采用共形几何代数从视觉上解决了简单机器人的IKP,并证明了几何代数是计算机科学和动画学的一种有前途的数学工具,随后,[17]提出了一种解决机器人手臂IKP的方法。虚拟人可以实时高效地使用可重新配置的硬件,并确保可以在计算机动画和图形应用程序中非常有利地使用此方法。 Aristidou和Lasenby [18]采用了几何代数来结合IKP,并描述了一种新颖的迭代逆运动学求解器[19] FABRIK,它是使用几何代数实现的,从而解决了人手的IKP用于姿势跟踪的问题。该应用程序证明了几何代数是一种有用的数学工具,可以成功地用于机器人技术中。但是,这些相关研究几乎集中在简化的机械手,拟人化的手臂和机器人上,很少用于复杂的多关节机械手。
所寻求的姿势显示为对应于第六个关节角度的四个单独的单变量三角方程的根。 应用标准数值求解器来导出所有可能的实际解集。 通过反替换,依次找到所有剩余的角度变量。 考虑了两种特定的臂设计,并通过讨论的方法获得了完整的解决方案。 该方法易于实现,可应用于各种6R串行机器人。
在本文中,我们将几何代数和双角度的强大优势应用于6R机械手的运动学建模中,并简单地生成闭合形式的运动学方程,使用符号消除技术将该问题重新构造为广义特征值问题,然后得出16个解。最后,以手腕偏置的喷涂机器人为例,说明该方法的有效性和实时性。而且,该方法有助于新颖,优雅,简单的表示和计算,以分析和应用通用机器人操纵器。
本文其余部分的结构如下。在第2节中介绍了表示3D欧式空间基本元素和转换的几何代数的概述之后,我们在第3节中介绍了基于几何代数的6R机器人操纵器逆运动学的数学建模和解决方案。第4节中给出了带有偏移手腕的喷涂机器人的数值示例,以验证该方法,表2中列出了所获得的所有16个解的集合。最后,第5节中给出了本研究的结论。
2.几何代数介绍
在本节中,我们将简要概述几何代数,以一种非常优雅且几何直观的方式表示基本元素和3D欧几里得空间的变换。 有关几何代数的更详细介绍,请参考参考文献。 [13,14,20,22–26]。
2.1几何代数的基本要素
考虑具有正交基数{e1,e2,e3}?的3D欧几里得三维空间,这些基元使用几何积的一组线性独立组合由下式给出:
这23 = 8个元素被命名为几何代数G3,0,0的基本元素,并具有以下属性:
在共形模型中,我们通过添加两个附加的正交基础元素
{e ,eminus;}扩展空间G3,0,0,并形成保形空间G4,1,0。
具有以下几何含义的另一个基础{e0,einfin;}:
e0::代表3D起源
einfin;::代表3D无穷大
2.2双角度
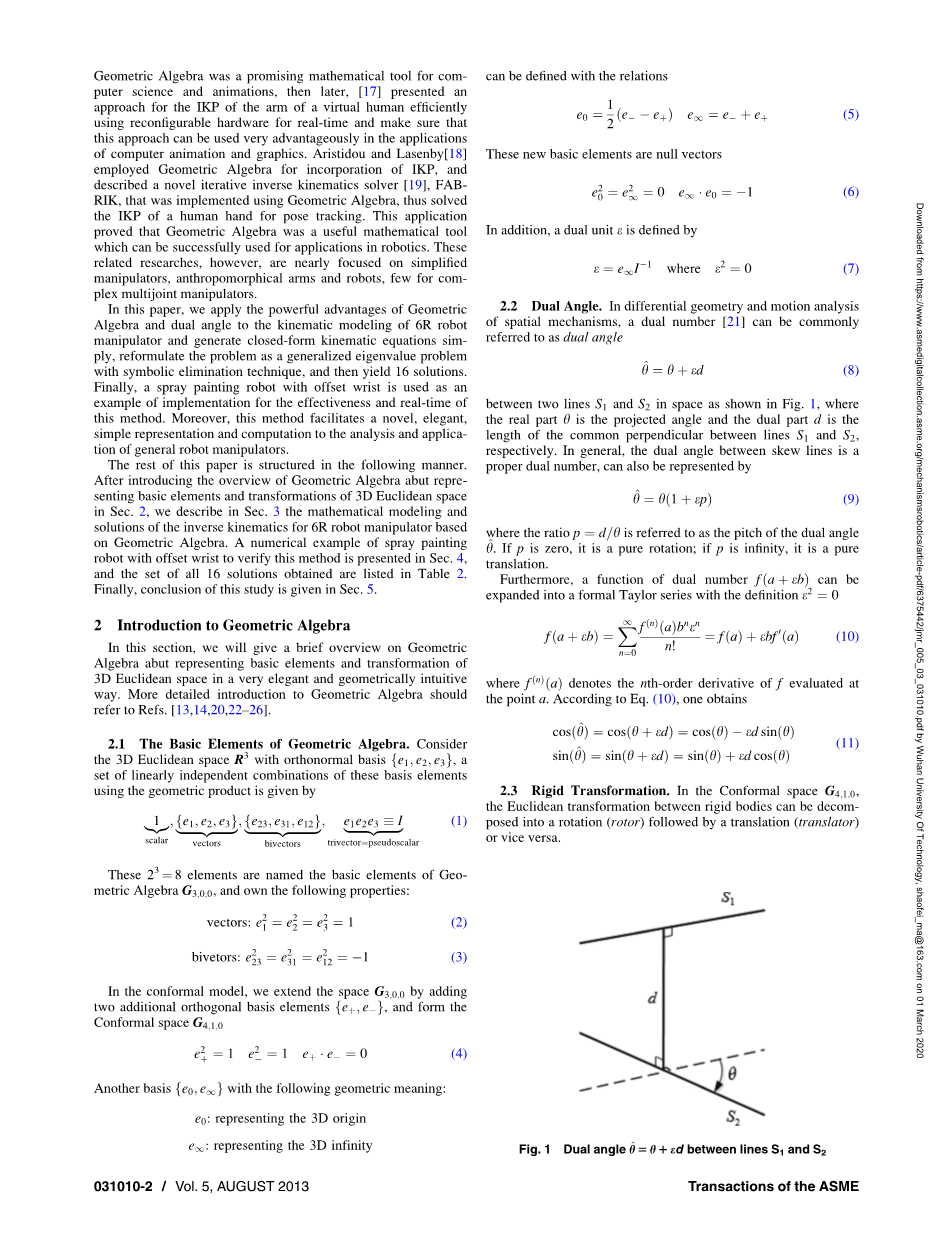
在微分几何和空间机构的运动分析中,双数[21]通常可以称为双角:
如图1所示,在空间中的两条直线S1和S2之间,实数部分theta;是投影角度,而对偶部分d是直线S1和S2?之间公共垂直线的长度。 通常,偏斜线之间的对角是一个适当的对数,也可以用
其中比率p = d /theta;称为双角度theta;the的螺距。 如果p为零,则为纯旋转。 如果p是无穷大,它是纯翻译。
此外,对偶函数f(a ɛb),可以扩展为定义ε2 = 0的形式泰勒级数。
其中f(n)(a)表示在点a求出的f的n阶导数。 根据等式(10),得到
2.3刚性转换
在保形空间G4,1,0。 刚体之间的欧几里德变换可以分解为旋转(转子),然后分解为平移(平移器),反之亦然。
转子R是满足RR〜= 1?的代数的偶数级元素,其中R〜代表R?的共轭。 通过使用转子的欧拉表示,我们可以将其编写如下:
向量X在转子R上的旋转由下式给出:
其中旋转轴正交于归一化双矢量所跨越的平面pi;= u1e23 u2e31 u3e12,theta;是绕该轴的旋转角度。 如图2所示。此外,转子以简单的方式组合,即转子R1后跟转子R2等于总转子R,其中R =R2R1。
电动机M可以描述刚性变形,并且由旋转和平移组成,两者都与同一旋转轴有关(图3)。 因此,可以写出电机
向量X在马达M上的变换(也称为丝杠运动)由下式给出:
X=MXMtilde;=RTXTtilde;Rtilde;
(16)
另外,通过引入双角度的概念并结合式(8),我们可以如下重写电机:
可以通过如下方式对对象Q进行刚性变换,例如点,线,平面,圆和球形,将其从左边乘以motorM,从右边乘以其反向M〜来实现例如[23,24]:
3. 6R机械手的逆运动学分析
3.1刚性转换的表示
机器人操纵器由许多刚体组成,这些刚体通过运动学关节相继连接以形成开放的串联机构。 根据D_H惯例[1],每个链接都可以通过附加的帧表示,四个参数theta;i,di,alpha;i,ai通常分别称为关节角度,链接偏移,链接扭曲角度和链接长度。 从框架Gamma;i-1到Gamma;i的变换i-1Mi由两个电机序列组成,一个变量,即MZi-1theta;and;,另一个常数,即MXi-1alpha;and;,请参见图4。 我们使用双角度theta;and;i=theta;i ɛdi和alpha;and;i=alpha;i ɛai。 角度theta;i是6R机械手的关节变量。 转换读取:
3.2运动学建模
给定图5所示的通用串行6R机器人操纵器,我们可以使用一系列电动机和双角度,在保形空间G4,1,0中编写运动学方程,如下所示:
,theta;iensp;是关节变量。
梳理方程式(19)和(21),我们可以得到以下形式的0M6结果:
其中mi和ni(i = 0,1,2,3)是6R机械手结构的D_H参数的函数,并且满足以下两个约束条件。等式(23),即刚体运动由保形空间G4,1,0中受两个约束的八个参数设定参数[26]。
此外,末端执行器相对于基础框架的位置和方向可以用3D欧氏空间E3中的4times;times;4均匀变换矩阵0T6表示,而电动机0M6则用保形空间G4,1,0表示。 使用公式从0M6到0T6的转换。 (18)和(22)可以表示如下:
根据等式(24),我们可以很容易地计算出从0T6到0M6的对应变换。对于IKP给出了末端执行器的位置和方向,即已知的0M6。 我们可以重写等式(21)如下:
让左手和右手等式(25)分别表示为ML和MR,我们将得到与Eq相同的形式(22)。
ML=lambda;l0 lambda;l1e23 lambda;l2e31 lambda;l3e12 ɛ(mu;l0 mu;l1e23 mu;l2e31 mu;l3e12)
(26)
MR=lambda;r0 lambda;r1e23 lambda;r2e31 lambda;r3e12 ɛ(mu;r0 mu;r1e23 mu;r2e31 mu;r3e12)
(27)
lambda;li,mu;li,lambda;ri,mu;riemsp;(i=0,1,2,3)是6R机械手结构的D_H参数的函数。
3.3解决过程
将通用机械手的D_H参数替换为等式(26)和(27),根据lambda;li=lambda;ri,mu;li=mu;ri(i=0,1,2,3),我们将得到:
其中
Ljisin;R4times;16,Rjisin;R4times;4(j=1,2) 的元素依赖于机械手结构的D_H参数。此外,等式(28)可以写成如下:
其等价形式由(29)可得到:
其中
此外,我们从等式(30)中提取变量t1并给出等式(29)的另一种形式:
3.3.1解决theta;1,theta;3和theta;4
根据结果消除的原理[7],我们可以构造以下行列式:
此外,可以将等式编写如下:
Sigma;isin;Rlt;
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[238392],资料为PDF文档或Word文档,PDF文档可免费转换为Word

