英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
利用遗传算法优化混合动力重型卡车的多目标燃油经济性指标的控制策略
摘要:对于昂贵的混合动力汽车动力总成部件的早期摊销,需要一种最优的控制策略。特别是在长途卡车的运营中,燃料成本对总拥有成本有很大的影响,而总拥有成本是运输企业的关键成本。结合路线信息,预测动力总成控制(PPC)系统提高了燃料的节能潜力。在基于MATLAB/Simulink模型的通用方法中,使用遗传算法对控制策略和PPC进行优化。必须在尽量减少燃料消耗和同时最大限度地提高车辆速度和爬坡能力以减少与时间有关的固定成本之间进行权衡。这导致了一个多目标优化问题。开发了针对并联混合动力构型的控制策略,该控制策略包括再生制动、升压、负载点转移和纯电动驱动等节能功能。该方法通过将控制策略与PPC结合解决了在长期运行过程中寻求最优控制参数的问题。本文介绍了基于规则的控制策略的建模、仿真和优化。对一辆内燃内燃机长途汽车的行驶路线和油耗进行了实际测试。记录的数据用于模型的建立和仿真工具的验证。通过优化的参数设置,在满足车速和爬坡度要求的情况,理论上可以达到11%的节油率。
关键词:无阻力转矩滑行,全混合,遗传算法(GA),混合动力汽车(HEV),多目标优化问题(MOP),控制策略,预测动力总成控制(PPC)
1.引言
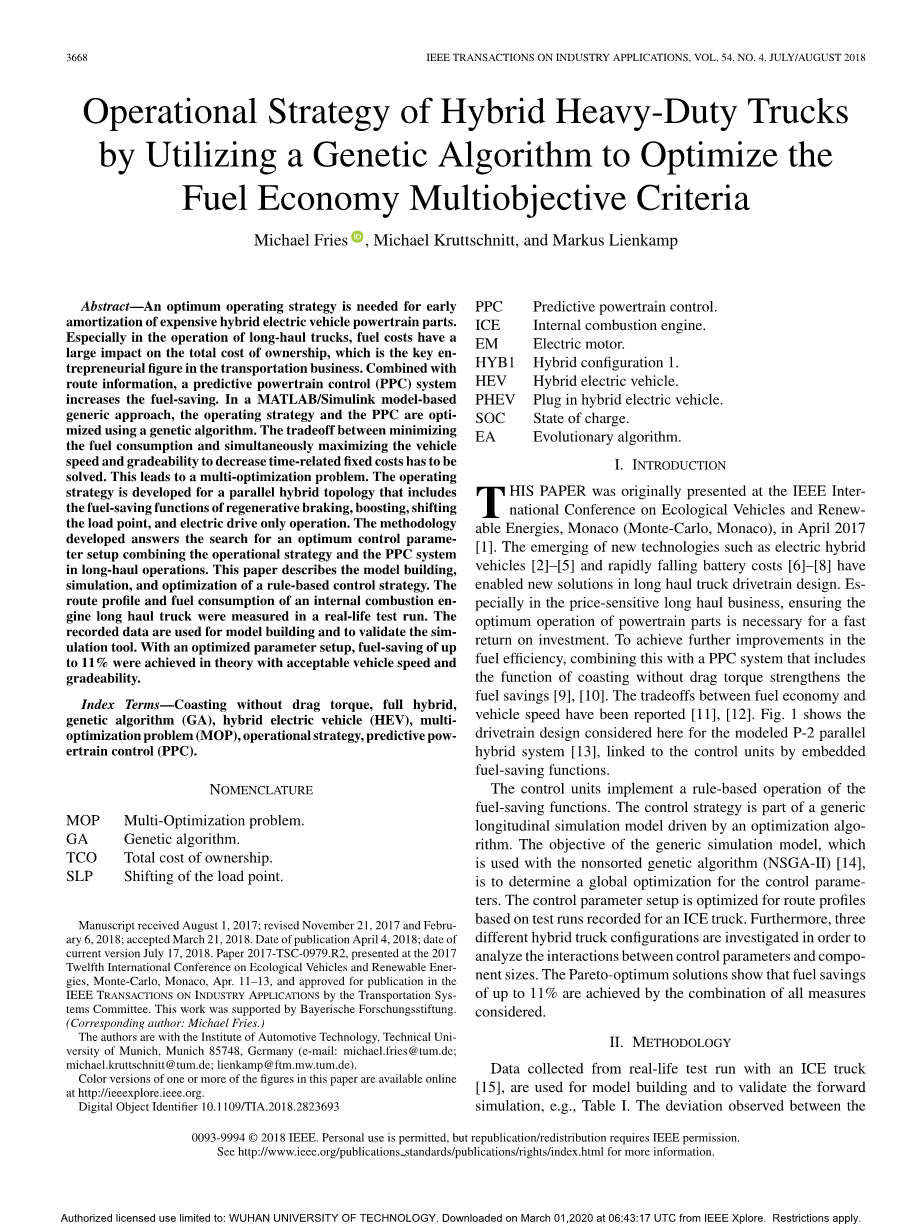
这篇论文最初是在2017年4月的IEEE生态车辆和可再生能源国际会议(摩纳哥蒙特卡洛)上发表的[1]。新技术的出现,如混合动力汽车[2,3,4,5]和电池成本的迅速下降[6,7,8],为长途卡车传动系统的设计提供了新的解决方案。特别是在对价格敏感的长途运输业务中,确保动力系统部件的最佳运行是快速获得投资回报的必要条件。为了进一步提高燃油效率,结合PPC系统,包括无阻力扭矩的滑行功能,进一步实现了节油的目的[9,10]。燃油经济性和车速之间的权衡已经被报道在参考文献[11,12]中。图1显示了P2构型的并联混合动力汽车的动力总成设计,该动力总成与带有节油功能的控制单元相连[13]。
控制单元采用基于规则的控制策略实现了节能的目的。该控制策略是由优化算法驱动的通用纵向仿真模型的一部分。该通用仿真模型与非排序遗传算法(NSGA-II)[14]相结合,其目的是确定控制参数的全局优化。根据ICE卡车的测试运行记录,对该路线轨迹的控制参数设置进行了优化。此外,研究了三种不同的混合动力汽车构型,以分析控制参数与部件尺寸之间的相互作用。帕累托最优方案表明,通过综合考虑所有措施,节油率可高达11%。
2.方法
通过现实生活中的ICE卡车试验运行所收集到的数据[15],用于建立模型,并验证正向仿真,如表一。
图1 具有节省燃料功能的并联混合动力拓扑结构图
表1 仿真参数
|
车辆参数 |
|||
|
参数 |
符号 |
单位 |
数值 |
|
汽车质量 |
|
kg |
14000 |
|
有效载荷质量 |
|
kg |
25500 |
|
面积 |
A |
|
10.3 |
|
空气阻力系数 |
|
- |
0.58 |
|
滚动阻力系数 |
|
- |
0.0052 |
|
轮胎半径 |
|
m |
0.501 |
|
发动机最大扭矩 |
|
Nm |
2100 |
|
传动轴比 |
|
- |
2846 |
|
轴传动效率 |
|
- |
0.98 |
|
平均电力辅助数值 |
|
W |
3500 |
|
变速比,齿轮1-12 |
|
- |
1.0-15.86 |
|
变速效率(1-11) |
|
- |
0.97 |
|
直接驱动变速效率(12) |
|
- |
0.99 |
根据沥青和天气条件[16]的不同,使用ICE的仿真工具与实际测试运行的燃料消耗之间的偏差为3%到5%。
在下一步中,进行电气部件建模。电机[17]、电池[18,19]和发动机意义,都是基于他们的性能MAP图进行建模。电能在电池和电机之间传输,电力电子损耗为5%。电机转矩和发动机转矩由齿轮箱组合成一个单独的驱动转矩。并联混合设计(见图1)允许增加扭矩,当电机作为发电机运行时,使用发动机驱动。图2显示了计算两个优化准则所需的正向仿真工具和物理量。
在选定的评价标准之间的权衡,即同时要求燃油消耗最小化和车辆速度最大化,产生了多目标优化问题MOP,具体公式如下:
. (1)
图2 仿真工具和优化
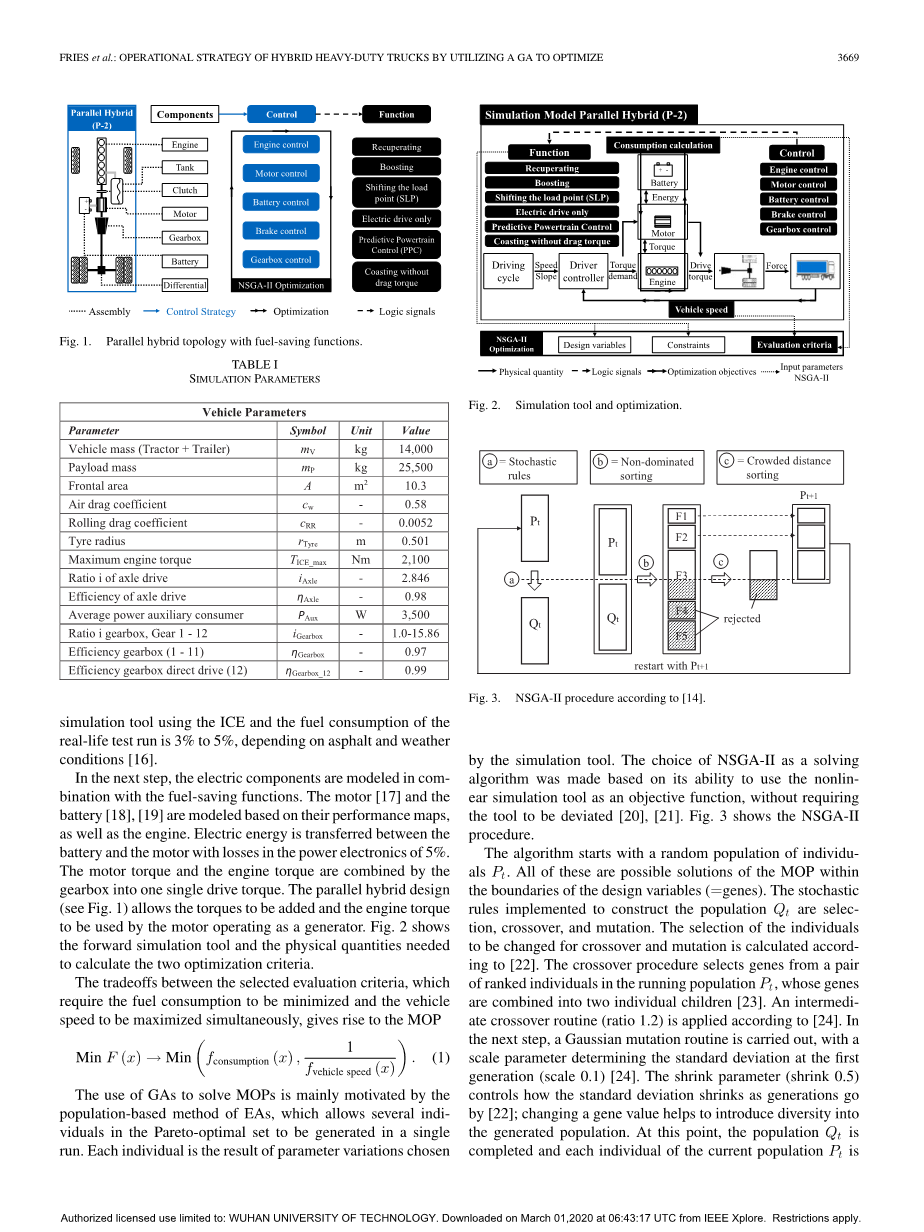
图3 根据参考文献[14]的NSGA-II步骤
使用GAs来解决MOPs的主要动机是它是基于群族的进化算法,允许在一次运行中生成多个pareto最优集合中的个体。每个个体都是仿真工具所选择的参数变化的结果。选择NSGA-II作为求解算法是基于其将非线性仿真工具作为目标函数的能力,而不需要工具偏离[20, 21]。图3显示了NSGA-II的步骤。
该算法从随机的个体Pt种群开始,所有这些都是在设计变量(=基因)边界内的MOP的可能解。构建种群Qt的随机规则有选择规则、交叉规则和变异规则。根据参考文献[22]计算需要进行交叉和变异的个体的选择。交叉程序从运行种群Pt中的一对排序个体中选择基因,这些个体的基因被合并为两个独立的子体。根据参考文献[24],应用中间交叉例程(比率1.2)。
下一步是一个高斯变异例程,用一个尺度参数来确定第一代的标准偏差(尺度0.1)[24]。收缩参数(shrink 0.5)控制随着代的增加标准偏差如何收缩[22];改变一个基因值有助于将多样性引入所产生的种群。此时,根据随机规则指定,完成总体Qt,并重新组合当前总体Pt的每个个体。根据模拟结果,将合并群体的个体Pt和Qt按照适应度值进行排序。较低的燃料消耗或较高的平均速度可以得到较好的适应值。对这些适应度值进行非优势排序,得到非优势前沿(F1、F2、F3等),见图3。一个成熟的算法只能确定一个前沿。合并种群(Pt Qt)是下一个进化改良世代Pt 1的两倍。因此,根据[14]的拥挤距离准则来保持结果的变化。现在后代种群Pt 1完成了。这些过程不断重复,直到达到最大代数为止。在本研究中,种群由30个个体组成,经过30代。
3.操作策略和ppc系统的建模
近年来,人们对插电式混合动力汽车[25]的优化控制策略进行了大量的研究。可以在整车控制单元上运行的实时全局优化目前还不能应用于真实的行驶工况 [26]。因此接下来提出了一种离线生成基于规则的最优控制策略的方法,该控制策略可以在线实现在车辆控制单元中。该策略可以实时运行,并且对故障具有很强的鲁棒性。基于规则的控制器不需要大内存和过高的计算速度。
3.1.控制策略的建模
P-2构型的控制策略的控制参数设置的目的是可以方便地在工作模式之间切换,并实现节能。再生制动取决于电机的最大转矩(TEM max)。Fbrake_el_max是指电机在发电机模式下,用来延迟卡车的最大纵向制动力,具体可以表示为:
(2)
如果电池系统的SOC低于1,再生制动是积极的。当要求的制动力(Fbrake request)超过最大可能的电制动力(2)时,气动制动系统提供附加制动力,如图4所示。在增压模式下,发动机转矩(TICE)由可用的电机转矩(TEM)支持。根据实际的SOC,通过控制参数SOCBoosting_fully_available完全可用来增加可用电机转矩所提供的全电动支持,见图4。图5显示了发动机的制动比油耗(BSFC)图,其中包括了SLP的原理。电机/发电机的电转矩(TEM)将发动机的负载点(LP)转移到一个具有更好的比功耗的区域,根据结果电池可以充电或放电。其目的是将LP调整到最小单位消耗量(TBSFC_min)。提升(参见图5,1→2)或降低(3→2)LP的过渡取决于控制参数指定的上、下SLP边界TSLP_up,TSLP_down,参见图4。纯电动的功能是由速度阀值vedrive触发的,该阀值设置了在使用电力时应达到的速度阀值。表二概述了需要优化的控制参数和设计变量。
表2 控制操作策略的参数
lt;
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[236975],资料为PDF文档或Word文档,PDF文档可免费转换为Word
|
操作模式 |
控制参数和设计变量 |
|||
|
控制参数 |
单位 |
设计变量 |
范围 |
|
|
复原 |
|
- |
no |
0-1 |
|
|
N |
no |
0- |
|
|
|
N |
no |
0-310000 |
|
|
提高 |
|
Nm |
no |
0- |
|
|
Nm |
no |
0- |
|
|
|
- |
yes |
0-1 |
|
|
移载点 |
|
Nm |
no |
|
|
|
Nm |
no |
0- |
|
|
|
||||

