
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
一种在手动和自动驾驶中用于车辆控制的方向盘
发明人: Ran Y. Gazit,Raanana(IL)
受让人:通用汽车全球技术 OPERATIONS LLC,密歇根州底特律市(美国)
申请编号:13 / 171,580
提交日期:2011年6月29日
摘要
本文提出了一种在手动模式和自动模式转向之间切换的系统和方法指导,包括方向盘部件发出一个信号给自动驾驶电子控制单元,进行自动模式转向,作为对该部件的一个自动接口方向盘的响应,从第一位置移动到第二位置。
技术领域
[0001]技术领域通常涉及驾驶车辆的系统和方法,更具体地说,是用于在手动和自动驾驶模式之间切换的系统和方法。
背景
[0002]目前存在几个问题,包括半自动和全自动驾驶系统。一个问题是,当车辆处于自动模式时,传统的方向盘会剧烈旋转。这可能会分散注意力,给司机造成混乱。另一个问题是,从车辆控制转向(自动模式)到驾驶员控制转向(手动模式)的转变是困难的。目前还没有明确和简单的方法来让司机承担手动控制或允许自动控制。在手动和自动驾驶模式之间切换也没有明确的界面。
总结
[0003]本发明是涉及手动模式转向和自动模式转向之间的传输系统和方法。该系统和方法给自动或手动模式下对车辆的两种模式和自然控制提供了明确的区分。特别地,本发明是一种车辆转向系统,用于车辆可操作的手动转向模式和自动转向模式。该车辆包括方向盘总成,具有自动方向盘,并包括自动驾驶电子控制单元(ECU)。自动方向盘从第一位置移动到第二位置,向自动驾驶ECU发送信号,并参与自动驾驶ECU。
[0004]当驾驶员想要越过自动驾驶并控制车辆时,抓住方向盘是驾驶员控制车辆的一种方式。此外,方向盘也可以是将车辆的控制转移到自动驾驶系统的手段。因此,使用方向盘作为手动和自动模式之间的接口是可取的。
[0005]该系统和方法涉及使用车辆转向系统,其中方向盘从第一平面移动到第二平面,将车辆转向切换到自动模式,并且车轮移回到第一平面,以改变转向模式返回到手动模式。
[0006]在一个实施例中,采用单个方向盘。当方向盘处于第一个平面时,它起着标准的手动方向盘的作用。将方向盘朝向或远离驾驶员拉动或推动方向盘,启动自动模式。通过将方向盘移动到原始位置,可以重新确定手动转向模式。
[0007]在第二个实施例中,采用了双方向盘总成,其中两个方向盘是同心的。一个方向盘,最好是内轮,是一个标准的手动方向盘,而另一个方向盘是与自动转向系统的接口。当方向盘在同一平面上时,方向盘在手动模式下作为标准的方向盘一起移动。然后将自动驾驶方向盘朝向或远离驾驶员拉动或推入第二平行平面,将车辆转换为自动模式。将方向盘推回到第一平面时,脱离自动模式。
[0008]根据本发明的一个方面,通过接合或分离作为自动驾驶电子控制单元(ECU)的一部分的自动转向系统,方向盘用作手动和自动转向模式之间的接口。
[0009]根据本发明的另一个方面,车辆转向系统由同心双方向盘组成,当它们处于同一平面时,在手动模式下共同工作。当这个方向盘从第一个平面上移动时,自动转向系统就开始工作。
[0010]根据本发明的另一个方面,该车辆转向系统包括同心圆的双方向盘,当被拉向或推离驾驶员的第一平面时,其中一个方向盘具有象征意义(不以标准的手动方式来操纵车辆)。
[0011]根据本发明的另一个方面,当转向系统处于自动模式时,内方向盘根据自动驾驶ECU的指令进行旋转。
[0012]根据本发明的另一个方面,可以在自动驾驶模式下旋转自动方向盘,以启动某些操作,如切换车道。
[0013]以上内容概括地概述了本公开的一些方面和特征,其应被解释为仅仅是对各种潜在应用的说明。 通过以不同方式应用所公开的信息或者通过组合所公开实施例的各个方面,可以获得其他有益结果。 因此,除了由声明限定的范围之外,还可以通过参考结合附图对示例性实施例的详细描述来获得其他方面和更全面的理解。
[0014]附图说明
[0015]图1是机械转向系统的图。
[0016]图2是根据本发明的一个实施例的机械转向系统的图,其中自动转向系统被接合。
[0017]图3说明了本发明的双方向盘实施例的运动; 图3a和图3b说明了处于手动模式的方向盘, 3c和3d表示自动模式下的方向盘。
[0018]图4说明了本发明的一个方面,其中处于自动模式的方向盘可以用于启动某些操纵。
[0019]图5说明了双方向盘组件的另一个实施例。
[0020]图6是线控手动转向系统的图。
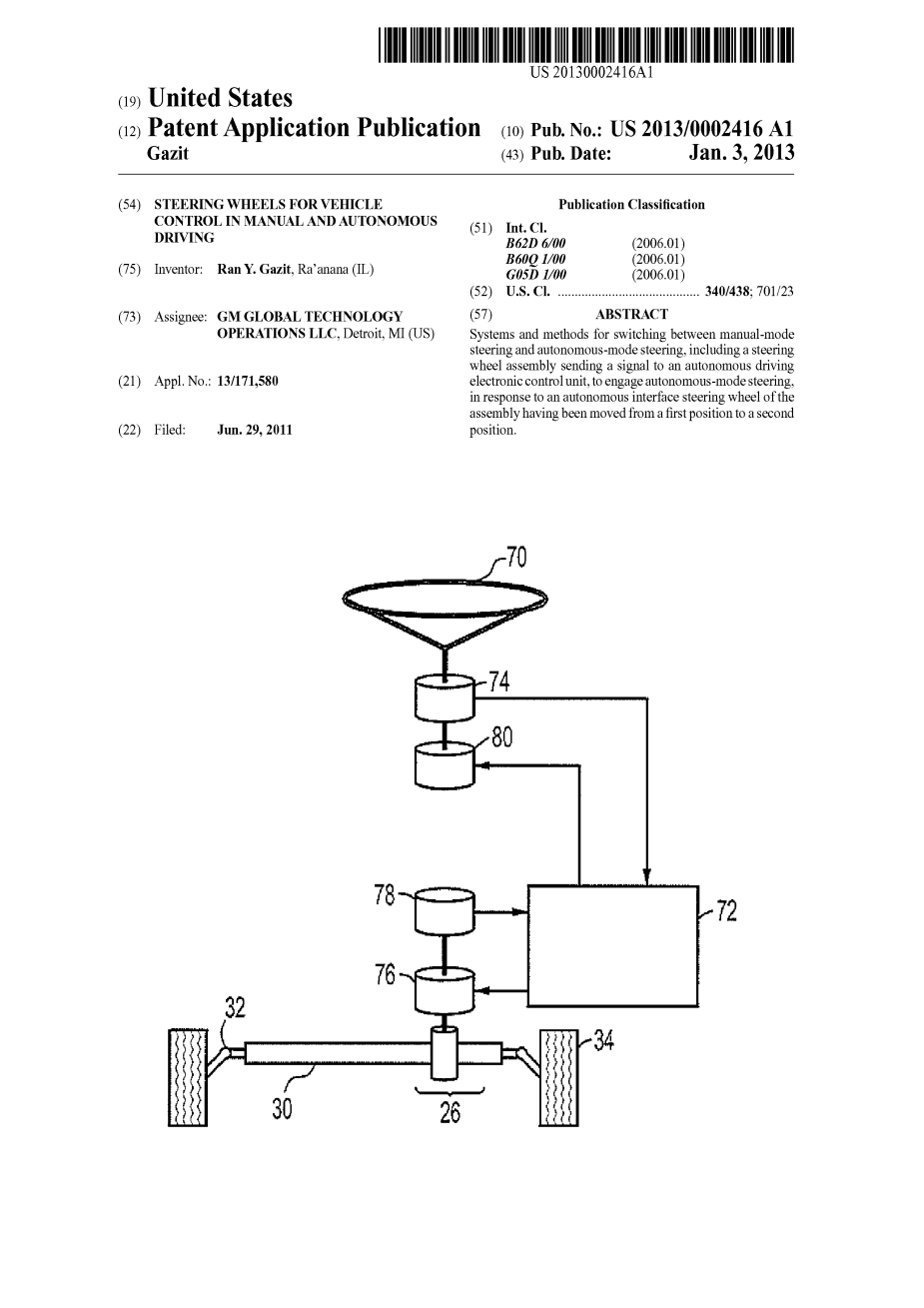
[0021]图7是根据本发明的一个实施例的线控转向系统的图,其中自动转向系统被接合。
[0022]图8a和8b更详细地示出了双方向盘组件。
详细描述
[0023]根据需要,在此披露详细实施例。必须理解,公开实施的实施例仅仅是模范性的,可以体现在各种不同的形式和组合中。正如这里所使用的,“模范”一词是指作为插图、标本、模型或模式的化身。附图不一定按比例绘制,并且一些特征可能被夸大或最小化以显示特定组件的细节。在其他情况下,人们所熟知的著名的部件、系统、材料或方法都没有被详细地描述,以避免模糊当前的信息披露。因此,本文所披露的具体结构和功能细节不应被解释为固定不变的,而仅仅是作为要求的基础,并作为教学技能的基础代表。
[0024]图1示出了手动转向系统。 车辆包括转向系统10,转向系统10包括方向盘12,转向轴22,包括小齿轮28和齿条30的齿条 - 小齿轮26,连杆32,车轮34,方向盘传感器36,车轮传感器38 ,以及电机40.方向盘12连接到转向轴22,转向轴22连接到齿条 - 小齿轮26,使得方向盘12的旋转运动传递到齿条 - 小齿轮26。 齿轮28将旋转运动转换成齿条30的线性运动。连杆32将齿条30连接到齿轮34并将齿条30的运动转换成齿轮34的旋转。
[0025]图1示出了本发明的机械转向系统如何在手动模式下操作。 方向盘12通过机械或电气离合器机构连接到转向系统。 当方向盘处于手动位置时,离合器42接合并且方向盘12直接与车轮34连通。离合器42可以是机械的或电动的。
[0026] 图2示出了处于自动模式的本发明的机械转向系统。 方向盘12已经被向上拉向驾驶员(未示出)。 这使得离合器42脱离,破坏了方向盘12和车轮34之间的机械连接,并且与自动驾驶ECU(电子控制单元)50接合。传感器44感测方向盘12的运动并且向自动驾驶ECU 启动自动转向。 自动驾驶ECU 50向线控转向ECU 52提供指令,该转向线ECU 52接收来自车轮传感器38的信号并向马达40提供信息。自动驾驶ECU 50包括自动转向系统的部件以及自动驾驶的其他方面。
[0027]图2将方向盘12示出为单方向盘,但也可以是双方向盘。图3示出了双方向盘组件14.在双方向盘实施例中,在手动模式下,两个方向盘16和18一起移动并且用作标准方向盘。 在自动模式下,当外方向盘18被固定时,内方向盘16根据自动驾驶ECU的指令旋转。 司机可以把他或她的手放在方向盘上,但这不是必需的。
[0028]方向盘组件可以以各种方式配置来将手动方向盘连接到手动转向系统并且允许自动方向盘12或18从手动转向系统脱离并且接合自动转向模式。 在双方向盘结构的一个实施例中, 如图8a和8b所示,手动方向盘90具有与转向轴94连接的中心杆92.在一些实施例中,自动方向盘96通过离合器机构98连接到手动方向盘90.当自动方向盘96 如图2所示向上拉。 如图8b所示,离合器98分离成离合器部分98,100,并且传感器(未示出)向自动驱动ECU(未示出)发送信号使其启动。 将自动方向盘96推回到其原始位置重新接合离合器98并且传感器(未示出)发送解除自动驾驶ECU(未示出)的信号。
[0029]图30示出了处于手动模式的方向盘组件14,其中内方向盘16和外方向盘18处于同一平面内, 图36从侧视图示出了处于手动模式的方向盘16,18。
[0030] 图3c和3d示出了处于自动模式的方向盘组件14。 外部方向盘18已被拉向驾驶员,离开仍由内部方向盘16限定的初始平面。外部方向盘18优选地移动最大约10cm,更优选地约1至5cm。
[0031]如图4所示,当车辆处于自动模式时,外部方向盘18可用于在某些方面控制车辆。转动方向盘可以向自动驾驶ECU 50提供信号以执行特定的操纵。该信号可以通过使方向盘18沿特定的方向旋转而给出。本发明的这个方面也可以用于单方向盘实施例。自动接口方向盘(18或12)的旋转可以是最小的,例如5°-20°,类似于转向信号旋钮的旋转。可以使用触觉反馈(“点击”)来给驾驶员机械反馈该命令已收到。在示例性实施例中,采用多于一个的“点击”,例如,在5°的转弯处的一个“点击”和在10°的转弯处的另一个“点击”,以便指示两个等级的命令。第一级可能规模较小或可能会延迟,而第二级(需要两次“点击”)则表示要求立即采取行动或者采取较大规模的行动。
[0032]本发明的这一方面也可以使用连续转动来实现;换句话说,在触觉反馈的情况下,不是由方向盘18、12的步进转动,而是由方向盘18、12的旋转程度所决定的。其他类型的反馈可以代替或者除了触觉反馈,例如听觉反馈。
[0033]-在预期的实施例中,系统被配置为允许驾驶员以其他方式指示各种动作级别,诸如通过将方向盘移动到某个位置并将其保持在某个位置一段时间。 例如,驾驶员可以将方向盘移动到5°的位置,并且接收指示第一级建立的反馈,并且将方向盘保持在5°位置持续两秒,表示驾驶员希望命令第二级 并且接收指示第二级别建立的反馈。该系统可以为方向盘提供硬停止,使其停在要求的位置以实现各个等级。
[0034]作为另一个示例,系统可以被配置为使得驾驶员通过第一动作(例如将方向盘转动到5°位置)来启动第一等级,并且通过重复第一动作来启动第二等级,并且接收反馈一个或每个动作的反馈。同样,系统可以为方向盘提供硬停止,使其停止在所需位置(例如5°位置)。
[0035]还可以设想,在任何所提及的实施例中,系统可以向方向盘提供一些偏置,诸如弹簧力,将轮偏置到诸如原位(例如0°)的位置。 这样的偏差具有以下益处,包括改善司机的感觉,以及在第一次动作后,让司机有明确的第二次动作。
[0036]可能希望在方向盘18,12上使用某种安全机构以防止驾驶员的意外旋转,例如必须克服的方向盘18,12转动的某种初始阻力 瞬间超越自动模式。
[0037]机动车辆可以在自动模式下执行的动作的例子包括车道变化、转弯、道路出口和停车。详尽阐述,包括的动作:
[0038]车道改变请求:车辆自动驾驶,并且驾驶员希望改变车道。 在期望的方向上稍微转动外方向盘18或12(一次“咔嗒”)将向自动驾驶ECU 50发送消息,并且当自动驾驶ECU 50确定它是安全的时候执行该命令。
[0039]“转向此处”命令:车辆自动驾驶,并且驾驶员希望在最近的交叉口转弯或离开最近出口处的高速公路。 在所需方向上外方向盘18的较大转动(两次“咔嗒”)将向自动驾驶ECU 50发送消息。当自动驾驶ECU 50确定其可安全地执行时,该命令将被执行,但是一个更高紧急程度级别将传达给路径规划模块,迫使车辆按要求转弯或驶出。
[0040]手动现场搜索后的自动停车(“停放在这里”命令):驾驶员将通过停车位,停车,换挡,拉动外方向盘并将其转向期望的方向。然后车辆将切换到自动驾驶模式,并且自动驾驶ECU将执行所需的停车操纵。
[0041]当驾驶员希望分离自动模式并重新获得对车辆的控制时,他或她将外方向盘18推回到内方向盘16的平面中,并且两个方向盘现在一起移动,作为标准手动方向盘。驾驶模式之间的切换可以进行控制,只有在满足特定条件时才允许开关。条件可能取决于车辆状态,驾驶员状态或环境条件。
[0042]从自动模式到手动模式的限制的例子,或反之,与单方向盘和双方向盘实施例相关的例子包括:
[0043]如果车辆操作遇到特殊的操纵环境 (例如,在转弯或当一些限速从手动切换到自动模式可能不被允许,当车辆的健康监测系统表明,一些传感器操作不当,或在特定的环境条件(例如,密集的城区或大雪)。
[0044]只有当驾驶员正在使用双手并向前看时,才允许从自动模式切换到手动模式。
[0045]在一个实施例中,方向盘16,18是彩色编码的,指示手动或自动模式。 例如,在手动模式下,两个方向盘16,18可以是相同的颜色,但是在自动模式下,其中一个方向盘可以是不同的颜色,使用发光二极管(LED)或方向盘上的颜色改变材料,颜色改变材料可以被配置为响应于来自自动驾驶ECU的提供给它的电荷而改变。在另一个实施例中,该系统被配置成选择性地点亮方向盘16,18中的一个或两个以指示车辆是否在手动模式或自动模式下操作。
[0046]同样的,在单方向盘实施例中,在手动模式下,方向盘12可以是一种颜色,而在自动模式下则是另一种颜色。
[0047]图5示出了本发明的双方向盘实施例的第二实施例。 在该实施例中,内方向盘60是自动模式接口并且外方向盘62用于手动转向模式。 如上述实施方式中那样,方向盘60,62仍然是同心的,但是彼此间隔开。 在手动模式下,当方向盘60,62处于同一平面时,驾驶员只将他或她的手放在外方向盘62上,而不是缠绕在两个方向盘60,62上。方向盘60,62间隔一英寸或更多。该实施例的优点在于,当推动或拉动独立方向盘60时,驾驶员不会将他或她的手指夹在方向盘60,62之间。
[0048]在这个实施例中,以及上面描述的两个方向盘相邻的地方,任何一个方向盘都可以是自动模式接口,可以移动来参与和脱离自动模式。
[0049]
全文共8093字,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[15429],资料为PDF文档或Word文档,PDF文档可免费转换为Word

