
英语原文共 6 页,剩余内容已隐藏,支付完成后下载完整资料
基于自适应模糊PID控制的大功率高压电动机动态无功补偿方法
王一飞 袁有新
摘要
由于大功率高压电动机的PF(功率因数,PF)较低,软启动期间和运行期间消耗的无功功率不同。本文提出了一种基于自适应模糊PID控制的大功率,高压电动机的动态无功补偿方法,以稳定电网电压,降低能耗。取得了以下成果:(1)开发了大功率,高压电动机动态无功补偿装置的拓扑结构;(2)研究了大功率高压电动机动态无功补偿系统的控制理论;(3)提出了一种基于自适应模糊PID控制的VIL(Variable Inductance Load,VIL),L的等效电感的调节算法。大宇电气有限公司采用了该方法,根据钢铁生产厂10千瓦,21千瓦风机负载的软启动需求开发软启动设备。在电机启动过程中,电流和无功功率补偿受到限制,软启动后无功功率补偿受到限制。这样,大功率高压电机的整体启动性能得到提高,能耗降低,电网电压稳定。
1.介绍
高压(gt;6kV)和大功率(gt;10,000kW)电机广泛应用于冶金,建筑,石化,煤矿,水利等领域。过电流电动机(高于电机额定电流的5-7倍)直接启动过程中严重损坏电网,电动机和拖动装置,导致继电保护误动作,自动控制功能不良等问题。软启动装置可减轻这种损坏[1,2]。因此,对软起动电动机的理论和方法进行了深入的研究。最新的高压电子马达的软启动方法包括降压启动,稳压启动和变频启动(包括离散可变频率和连续可变频率)。
尽管提高了软启动的性能,但高压逆变器需要先进的技术,高成本和稀有的原材料。以降低电压开始的技术包括电机和电抗器串联定子绕组,自耦变压器,星形/三角形变化等。启动软启动的稳压启动包括电机定子绕组和串联液体电阻器,晶闸管-磁饱和电抗器降压启动[3]等。这些软启动方法可以缓解与高压和低功率电机的启动过程有关的问题,但它们不适用于软启动高压电子器件高功率或超高功率的电机。例如,软启动方法在高空/超高功率和高压电子马达以及空载,轻载和重载多任务条件下的无功补偿方面存在限制。
应采取以下措施实现大功率和高压电机的软启动[7,8]:
(1)超高功率高压电动机软启动过程中的启动电流应限制在满足多任务负载的机械要求,避免影响电网,电动机和拖动装置。
(2)大功率高压电动机软启动过程中的功率因数应提高,能耗降低,电网电压稳定。
之前,我们报道了磁控软起动装置[7-11],其中高电压由低电压控制以消除晶闸管限制,从而增加了软起动装置的应用。基于可变电抗的无功功率补偿软启动装置被提出来克服诸如低PF和高无功功率的限制[12,13]。
传统的无功功率补偿装置包括有TSC(晶闸管开关电容器),TCR(晶闸管控制电抗器),FC TCR(固定电容器 晶闸管控制电抗器)和混合电路(TCR TSC)[14]。由于TSC不连续调节特性,TSC不适用于无功补偿,而TCR TSC需要精确控制和高成本。因此,FC TCR一直是这些设备中使用最广泛的设备。FC TCR可通过改变晶闸管导通角实现动态调节的无功补偿。上述无功功率补偿装置可能导致过度或不足的补偿;因此,它不适用于大功率和高压电子马达。
以前的研究还表明,电容器开关可以优化无功功率补偿控制。例如,Yu等人[15-17]提出了一种控制策略,其中TSC模糊控制被用来实现动态无功功率补偿。 由于在精确的输入测量中通常观察到开关边界的振荡,所以模糊控制策略与实际经验相兼容。而且,这种策略可以减少理论计算并避免电容器频繁切换,从而提高系统稳定性。
Pan [18]研究了TCR中静态无功补偿装置的原理。补偿导纳计算公式,获得并研究了控制系统的组件。Yao[19]提出了用于电容器开关控制的无功功率补偿控制系统的仿真。袁有新等人[20]报道了可变反应堆的建模和仿真。针对传统的无功补偿装置,这些研究为本文的研究提供了很好的参考,包括电容器开关控制,电感阻抗转换控制和控制计算。
基于以往的研究和独特的系统拓扑结构,本文提出了一种基于自适应模糊PID控制的大功率,高压电动机无功动态补偿方法。建立测试平台并验证无功功率跟踪能力。本研究通过快速补偿大功率高压电动机的动态无功功率,提出了解决大功率,高压电动机功率因数低PF,不同时段消耗无功功率等问题的解决方案。
2.动态无功工作补偿装置的拓扑结构
该动态无功补偿装置对于大功率和高压电子马达应该迅速跟踪软启动和运行过程中消耗的无功变量,平稳地恢复供电,改善电力参与者,稳定电网电压并降低能耗。
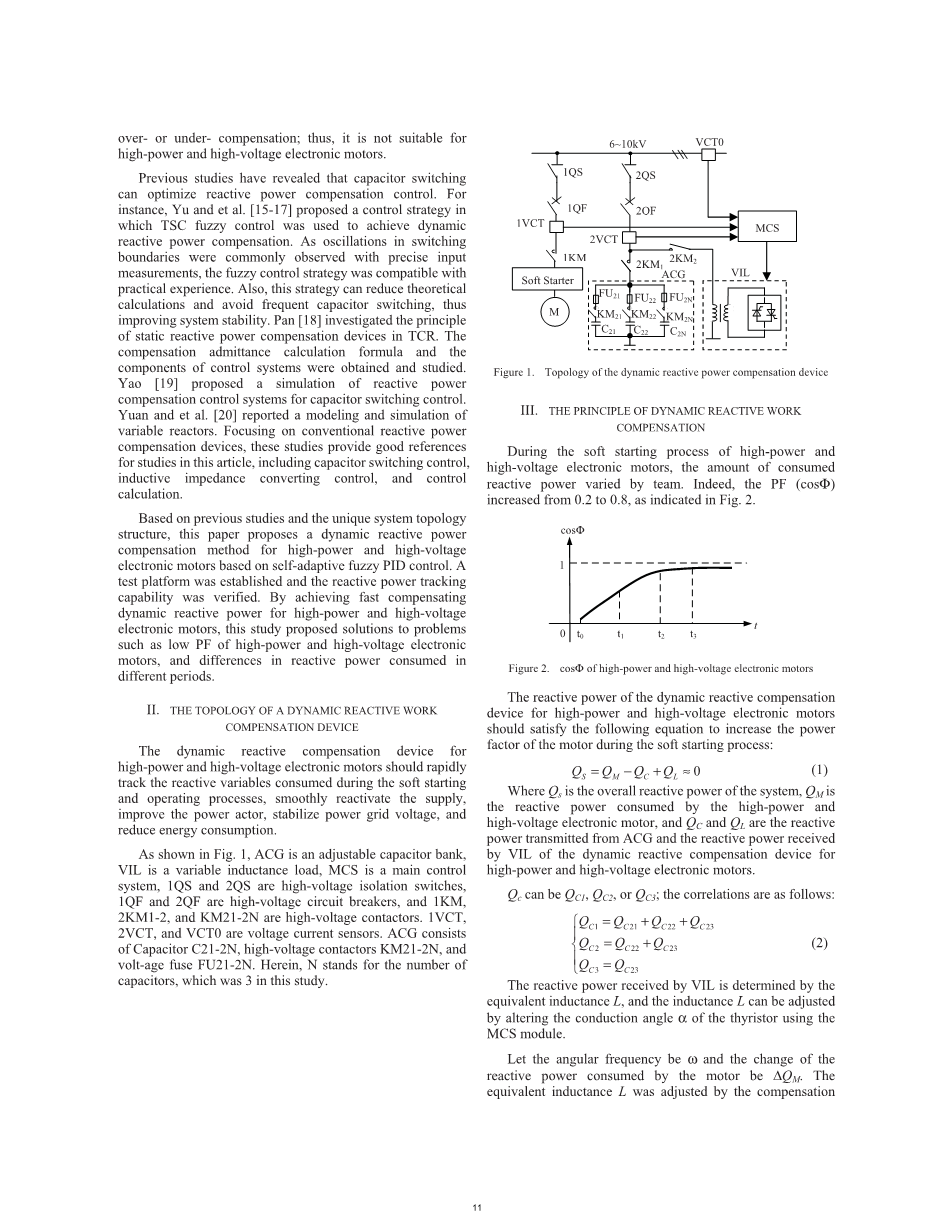
如图1所示,ACG为可调电容器组,VIL为可变电感负载,MCS为主控制系统,1QS和2QS为高压隔离开关,1QF和2QF为高压断路器,1KM,2KM1-2和KM21-2N是高压接触器。1VCT,2VCT和VCT0是电压电流传感器。ACG组成电容器C21-2N,高压接触器KM21-2N,和电压保险丝FU2这里,N代表数量电容器,这在这项研究中是3。
图1 动态无功功率补偿装置的拓扑结构
3.动态活动工作补偿原则
在大功率和高压电子马达的软启动过程中,无功功率消耗量因团队而异。事实上,PF(cosphi;)从0.2增加到0.8,如图2所示。
图2 高功率和高压电子马达的成本
大功率,高压电动机动态无功补偿装置的无功功率应满足以下公式,以提高软起动过程中电动机的功率因数:
(1)
其中QS为系统总无功功率,QM为大功率高压电动机消耗的无功功率,QC和QL为ACG传输的无功功率以及用于大功率和高压电动机的动态无功补偿装置的VIL所接收的无功功率。Qc 可以是QC1,QC2或QC3相关性如下:
(2)
VIL接收的无功功率由等效电感L决定,电感L可通过使用MCS模块改变晶闸管的导通角alpha;来调节。设角频率为omega;,电机消耗的无功功率变化为 Delta;QM,等效电感L通过补偿进行调整装置,系统无功功率近似为零。因此,可以得到下面的等式:
(3)
这样就可以得到等效电感L和由负载引起的无功功率Delta;QF变化之间的关系:
(4)
根据公式(4)中,如果补偿路径与等效电感L相匹配,则可以追踪软启动过程中电机功耗的变化。设可控硅导通角为alpha;,可变电抗的一次和二次等效阻抗分别为Z1和Z2,根据以前的研究[17],可以得到以下等式:
(5)
可变电抗线圈的绕组电阻和磁耦合电阻可以忽略不计,因此初始工作期间可变电抗的次级等效阻抗等于次级电感电抗,即|Z2|=omega;L2. 用|Z2|=omega;L2 代入方程(5)可以得到:
(6)
可变电抗的等效阻抗是感性的,等效电感被标记为L,可变电抗的补偿路径中的等效电感L与晶闸管的导通角之间的关系可以由以下等式描述:
(7)
根据公式(7)式中,等效电感L与导通角alpha;动态相关,从而满足式(7)的要求。(1)和(3)表明动态补偿装置提供大功率和高压电子马达消耗的无功功率QM。下图3显示了大功率和高压电机的无功功率QB的动态补偿曲线。
图3 无功功率的动态补偿曲线
下图4显示了大功率和高压电动机的动态无功补偿的工作原理。主要控制和二级控制是通过电力实现的,可调电容器组的传输,以及可变电抗负载的功率吸收。
大功率和高压电动机的动态无功补偿实现如下:
- 检测到的电压和电流信号由控制模块分析以获得PF;
- 计算高功率和高压电子马达(QM);
- 基于无功功率确定系统的无功功率传输(QC)传动机构;
- 基于无功功率吸收机制确定系统的无功功率吸收(QL);
- 控制信号被传送到操作模块;
- 电动机的无功功率是通过在运行模块中使用ACG和VIL来同时提供的
图4 动态无功功率补偿的工作原理
4.VIL的自适应模糊PID调节和等效电感L使用模板
在大功率高压电动机的动态无功补偿中,吸收的VIL无功功率可以连续调节,并且可以逐步调节开关电容的输出无功功率。可通过粗调动态无功补偿的可切换电容器传输无功QC。阻抗转换器允许对动态无功功率补偿进行微调,可吸收反应QL。从电网测得的无功功率为QS。这三个参数满足方程(1)。
如图5所示,r是指电网功率因数,e和ec分别是功率因数的误差和误差变化率,模糊控制变量E和EC是通过e和ec模糊化获得。以E和EC作为输入参数,获得PID控制器KP,KI和KD的三个输出实时修正参数,并将其用作PID输入。通过使用中间层模糊运算规则(经验设置),可以获得动态跟踪系统变化并优化自适应控制的优化PID参数。自适应模糊PID控制算法分四步实现:输入变量模糊化,子集从属度函数模糊化,设定模糊控制规则,设定量化因子。
图5 自适应模糊PID原理示意图
A 模糊化
根据模糊PID控制方法,设计了模糊PID模糊控制器,设计了两个输入三个输出:误差e和误差变化率ec作为输入参数,以及三个PID参数Delta;KP,Delta;KI,Delta;KD作为输出参数。实际上可以确定Delta;KP,Delta;KI,Delta;KD的值。在这里,所有七个变量被定义为分别为负大,负中,负小,零,正小,正中和正大的模糊值{NB,NM,NS,ZO,PS,PM,PB}。基于e和ec的可接受范围,e和ec的话语领域分别设为[-3,3]和[-3,3],量化等级为7。确定e,ec(在这种情况下为gaussmf),Delta;KP,Delta;KI,Delta;KD(在这种情况下为trimf)的从属函数。
B 模糊控制规则
基于大功率,高压电动机的变化和典型的PID调节参数设置,PID参数设置规则可概括如下:
- 如果误差较大,应增加KI,减少KI以减少调整时间。此外,更大的积分行为将导致系统重新启动。因此,KI应不大于0。
- 中等误差,减少系统过冲是主要目标。 因此,KP减少,而KD和KI相应地调整。
- 由于误差较小,系统稳态误差最小化是主要目标。KP和KI增加;选择适当的KD以避免系统振荡。
以上总结了无功功率补偿器的现场测试经验和理论建立适当的模糊规则表。同时,一个模糊控制规则表基于典型的PID参数调整上述规则,提出了三个PID参数变量Delta;KP,Delta;KI,Delta;KD。Delta;KP,Delta;KI,Delta;KD的模糊控制规则分别示于表1,2和3中。在参数设置中,使用具有模糊化输入的模糊控制器和下表中的表格来确定Delta;KP,Delta;KI,Delta;KD的相应模糊化值;通过基于上述模糊规则的处理和操作来计算PID控制参数。
表1 Delta;KP的模糊控制规则表
表3 Delta;KD的模糊控制规则表
表2 Delta;KI的模糊控制规则表
C 量化因子
对于大功率和高压电动机,系统误差的话语域被设为[-1,1],误差变化率的话语域被设置为[-1,1],Delta;KP,Delta;KI,Delta;KD3个模糊参数的话语域设为[-0.6,0.6],参数模糊话语域设为[-3,3]。这样就确定了输出量化因子的相应值。根据上述步骤建立了阻抗变换器调节系统中的模糊PID控制器。
5.结论
本文提出了一种基于自适应模糊PID的高功率,高压电动机动态无功补偿方法。所提出的方法被用于在钢厂软启动要求10kV和21000kW引风机负载下开发软启动装置(参见图6)。
图6 带有21000kV风机负载的软启动设备
在应用中验证了该方法的有效性,满足了限流和无功补偿要求,实现了无功补偿。大功率高压电机的整体启动性能得到提高,能耗降低,电网电压稳定。
(1)软启动过程中的无功补偿将电机的启动电流限制在额定电流的两倍以内,电网电压降至5%以下。多任务负载所需的机械性能得到满足,从而避免了电网变化以及对电机和驱动设备的损坏。能源消耗和成本降低,电网电压稳定。
(2)通过动态跟踪无功功率来平衡大功率和高压电动机的无功需求。通过智能控制器调节无功补偿参数,通过开关电容将无功功率传输至系统,利用低压电力电子转换电路动态调整高压主电路的电抗,平滑吸收系统的无功功率并迅速补偿配电系统或电力负载的动态反应。
基于自适应模糊PID的大功率高压电动机动态无功补偿方法具有以下四个优点:
资料编号:[14134],资料为PDF文档或Word文档,PDF文档可免费转换为Word
- 良好的环境适应性:高/低压隔离的概念涉及电力电子感知阻抗变换器的结构,以降低介电强度和对电力电子组件的操作环境的要求。
- 实时跟踪:智能传感器和控制器实现了无功功率的实时监控和分析,以及大功率和高压电子马达的电流。
- 稳定快速补偿:两级控制策略和优化控制算法实现了负反馈控制系统的稳定性,快速性和准确性。
- 连续可调性:可调节电容器组和阻抗转换器一起工作以发射或吸收电网,从而实现快速无功补偿和连续可调性。 <!--
全文共6654字,剩余内容已隐藏,支付完成后下载完整资料

